直流系统继电误动作半实物仿真平台设计与分析*
2017-12-18 07:59:04刘追刘振兴王琦
电测与仪表 2017年18期
刘追,刘振兴,王琦
(武汉科技大学信息科学与工程学院,武汉430081)
0 引 言
变电站中错综复杂的直流电源供电网络,用于对继电器保护装置、信号系统、断路器跳合闸、直流充电机、通信UPS等各个子系统提供安全可靠的工作电源。一般含有蓄电池、报警装置、绝缘监测仪、充电装置、空气开关,以及保险等,其接线图如图1所示[1]。
随着变电站规模的扩大、站内电设备的大量使用等因素,随之给电网带来“直流系统一点接地引起继电保护装置误动”的频繁发生。电力系统运行经验一般认为发电厂、变电站直流系统发生一点接地系统仍能继续维持运行,但根据现场运行经验,系统一点接地,同样可能导致出口保护继电器的误动,从而导致变电站主变跳闸或发电厂的发电机组停运,严重影响生产[2]。对于一点接地引起的继电保护装置误动作的分析,目前大多采用的技术是利用PSCAD/EMTDC软件对电厂系统进行仿真分析,得到相关的实验结果并提出改进的方法与措施[3-4]。但PSCAD/EMTDC软件只能对系统电磁状态进行仿真,和实际电力系统之间存在误差。实物实验则受硬件设备及环境等因素的影响,往往成本过高,且难以模拟一些极限工况,分析范围有限。

图1 直流系统接线图Fig.1 DC system wiring diagram
综合上述问题,利用半实物仿真平台搭建了变电站直流系统仿真模型。半实物仿真亦称为硬件在回路仿真(Hardware In the Loop Simulation,HILS),是一种将部分硬件实物引入到仿真回路中的仿真[5],其过程可以分成四个部分:(1)仿真计算机系统;(2)接口;(3)环境模拟设备;(4)被测实物,如图2所示。其中某一元器件仿真模块完全由实物替代,将离线仿真和物理实验有机结合,克服数学模型过于理想化的缺点,使得仿真结果更具真实性。

图2 半实物仿真系统框图Fig.2 HILS system structure block diagram
RT-LAB是加拿大Opal-RT公司开发的一套基于模型的仿真系统平台软件包,可以让设计者将基于MATLAB/Simulink以及MATRIXx/SystemBuild等图形化建模工具所搭建的动力学系统和数学模型,通过上位机和多处理器目标机的模式,在实时仿真平台上运行。RT-LAB仿真器支持种类非常广泛的商用货架I/O产品,它将I/O设备接口制作成Simulink模块,供Simulink模型中设置和调用,而无需开发Simulink接口[6]。RT-LAB半实物仿真平台近年来来在多所高校和科研机构中得到使用,其研究成果大量应用到电网、新能源、航空航天等行业领域[7-10]。
在RT-LAB软件中建立变电站直流系统仿真模型,并将继电器实物取代仿真模型中的继电器模块,形成半实物仿真分析平台,利用平台分别对接地电阻和长电缆分布电容对变电站直流系统继电器误动作的影响进行分析。
1 直流系统接地模型
变电站直流系统常见的接地故障有正极接地,负极接地和继电线圈接地。对于直流系统接地故障的监测目前大多仍采用电桥法,这种方法的绝缘监测装置由信号部分和测量部分两部分组成。根据实际变电站直流系统的工作状态和继电器设备的特性,通过参考文献[11],得到如图3所示负极接地等效电路图,R为绝缘监测装置中的平衡桥电阻,R1和R2为绝缘监测装置中的切换桥电阻,C1和C2分别为正负极所有设备对地电容总和,C3是长电缆分布电容。Rj1是继电线圈串联电阻,Rj2是继电器线圈电阻,Lj则为线圈的电感。系统正常运行时会有微小的电流流经继电器,但是并不会引起继电器动作。而当系统发生一点接地时,电桥不再维持平衡,流经继电线圈的电流增大,则可能会引起继电器断开。本文主要讨论直流负极接地情况,设负极接地电阻为Rd。

图3 等效电路图Fig.3 Equivalent circuit diagram
初始状态下开关K1、K2均保持闭合,接着系统发生故障接地,接地电阻为Rd,之后的切换桥的投切过程是首先K1断开,K2保持不变,然后K1闭合的同时K2断开。投切过程会产生电流Ij流过继电器阻抗Zj,线圈阻抗产生电压Uj,如果Uj超过继电器动作电压0.6UD(UD=24 V)时,则引起继电器控制的开关误动。
2 半实物仿真平台搭建
2.1 仿真模型
根据系统等效电路图,建立仿真模型。在RT-LAB里所有顶层子系统的命名都要含有一个前缀以区分它们的功能,将直流系统及其信号输出模块封装成SM_MAIN主计算子系统,将仿真信号采集及其观测模块封装为SC_SCOPE控制台子系统。对模型进行分割划分后,在每个子系统信号输入端添加OPComm模块对每个子系统的输入量进行同步。图4为直流系统负极接地实时仿真模型的SM_MAIN子系统,元件参数见表1。

图4 实时仿真模型的子系统模型图Fig.4 Subsystem of RT-LAB model

表1 部分元件参数Tab.1 Partial components parameters
其中R3为直流电源DC的内阻,Step用来控制电阻Rd的接地时间,Step1、Step2和Step3、Step4分别用来控制K1和K2的断开和闭合时间,两次开关动作的时间间隔要能够使系统达到稳定。本次仿真的目的是分析K1/K2断开闭合的过程中,在已设定的电路元件参数下,继电器两端的电压是否会达到其动作电压,即是否会引起继电器产生保护误动作,得到如图5所示的线圈电压仿真波形图。
由图5可知,在t=0 s~8 s之间,由于长电缆分布电容C3的存在,继电器线圈电压为0。由于发生了直流系统负极电阻Rd接地故障,继电器线圈电压波形在8 s时有轻微波动,之后衰减为0。t=15 s,开关K1断开,K2保持不变,电容C3开始充电,线圈电压变为负,当电容充电完成后电压重新回到0。t=25 s时,K1闭合同时K2断开,C3开始放电,线圈电压急剧上升。

图5 实时仿真继电器线圈电压波形Fig.5 Voltage waveform of real-time simulation relay coil
上述仿真中,当继电器端电压Uj超过继电器动作电压0.6UD时,会引起继电器控制的开关误动作。通过观测电压波形图可知,最大波动电压值为14.5 V,已经超过动作电压,继电器状态理论上会从闭合变成断开。仿真中继电器由阻感电路模拟,阻感数值通过实物测量得到,其中存在一定误差。由于该仿真没有完整展现实物继电器动作过程,无法确定仿真中的电压波动能否真实触发继电器实物动作。
2.2 半实物仿真模型
eMEGAsim实时仿真器包括上位机和下位机两部分,上位机使用普通的PC机,运行Windows操作系统以及RT-LAB软件,下位机使用加拿大Opal-RT公司生产的并行计算机OP5600[12]。
2.2.1 模型
利用实时仿真器,用实物继电器取代软件仿真中的继电器模拟电路,能够减少模拟误差,提高仿真精度,同时实时仿真器能够有效提高仿真速度,将仿真运行速度和实际时间同步,真实模拟继电器断开过程。
在RT-LAB软件模型中用受控电流源取代原继电器模块,受控电流源两端电流代替前后不变,确保直流系统模型中其他支路不会因为该条线路连接实物设备而受到影响,从而保持整个系统仿真模型保持原有电气特性,系统除继电器部分外,其他元器件不受实物替代的影响。替代部分原理图如图6所示,在该部分中,采集继电器回路中的电流,并转换成相同数值的电压,通过输入到仿真机中来驱动受控电流源,使原支路上电流与继电器回路电流相同。为了避免代数环和最大化并行运行,模型中在信号输入端添加Memory模块。

图6 替代部分原理图Fig.6 Schematic diagram of replacing part
2.2.2 I/O模块
在SM_MAIN子系统中添加模拟信号I/O驱动模块OpCtrl ML605EX1,信号输入端添加ML605EX1 AnalogIn模块,输出端添加ML605EX1 AnalogOut模块。根据图5的仿真波形可知最大电压值为15 V左右,选择BRK37M板卡(±15 V)进行I/O连接。
半实物仿真模型如图7所示,模型运行时,电压测量模块采集受控电流源两端的电压,通过BRK37M板卡输出并与继电器线圈组成回路,通过电流-电压互感器采集继电器回路的电流并转换成电压信号经过BRK37M板卡输入到仿真器中用来驱动受控电流源,同时采集继电器线圈的端电压信号输入系统中,便可在SC_SCOPE中观测电压波形。
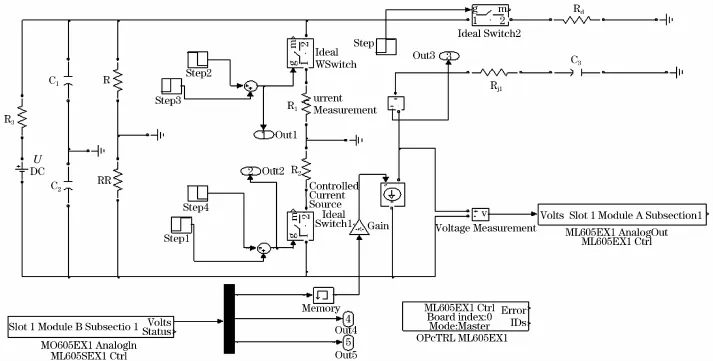
图7 半实物仿真模型图Fig.7 HILS simulation model
2.2.3 继电器状态测量回路
半实物仿真分析平台采用型号ST1-DC24V的继电器实物。如图8所示,a为继电器的实物图,b为继电器无励磁状态下的原理图,其中端子1和端子4构成继电器的控制回路,主要由电阻及线圈组成,端子5和端子6在无励磁状态下为常闭、端子7和端子8在无励磁状态下为常开。当控制回路两端的电压达到动作电压时,励磁线圈产生的电磁力会作用于开关,使得端子5和端子6断开而端子7和端子8闭合。

图8 ST1-DC24V继电器Fig.8 ST1-DC24V relay
为了观察到实物继电器动作的时间,将常闭端子5、6间串联直流稳压电源,并将直流电压信号通过BRK37M输入到仿真器中,令其为Ut,则当继电器闭合时,该直流稳压电源输出大小为Ut的直流电压,继电器断开时,则Ut=0,
测量采用到的硬件和接线如图9所示。图中a、b、c、d表示为:
a为直流稳压电源:5 V;b为电流-电压互感器;c为仿真机外部接线图;d为BRK37M板卡。
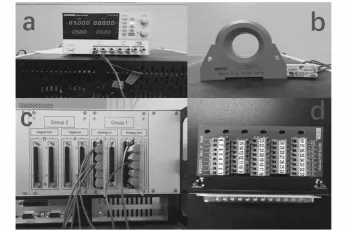
图9 部分实物及接线图Fig.9 Partial physical maps and wiring diagram
2.3 结果分析
在PC端RT-LAB程序执行打开模型、编译模型、分配节点、加载模型、运行以及重置,软件将会对仿真模型执行分割、编译链接、加载等操作,将仿真模型应用到半实物仿真系统中。仿真波形如图10所示。

图10 半实物仿真继电器线圈电压波形Fig.10 The HILS simulation waveform
对比图5和图10,继电器端电压整体波形基本一致,但在幅值上,采用继电器模型时候最高电压值为14.5 V(电压动作值为14.4 V),采用实际继电器代替原模型后最高电压值增加了4.83%,达到15.2 V,这是因为模型的简化的,与实际继电器内部复杂的结构相比,会有一定的偏差。从图11所示的Ut波形可以看出,在0 s~25 s时未达到继电器的动作电压,则继电器的开关处于闭合状态,此时Ut=5 V;当运行至第25 s的时候,波形发生向下阶跃,表明此时实物继电器端电压超过动作电压值,继电器断开;当运行至27 s左右时,波形发生向上阶跃,表明继电器端电压下降到其动作电压之下,实物继电器回到闭合状态。通过半实物仿真结果可确定,在表1参数设置下,当开关K1,K2按序动作时,会引起实物继电器动作。

图11 直流电压Ut波形图Fig.11 Waveform diagram of DC voltage Ut
半实物仿真系统相较于纯仿真来说,会有一些噪声干扰,但从仿真结果可以看出,半实物实时仿真平台基本达到了所要求的技术指标,也证明半实物仿真移植到实际系统可行性、便利性。
3 仿真分析
3.1 接地电阻值对继电器误动的影响
利用以上搭建的半实物仿真平台,可以分析直流系统中不同元件参数变化对继电器动作的影响,本文以Rd为例。在电路中其它参数不变的前提下,不同的接地电阻值有不同的线圈电压波形图,如图12所示的分别为Rd=1 kΩ,10 kΩ和500 kΩ时线圈电压波形图。

图12 不同接地电阻时继电线圈电压波形Fig.12 Waveform with different grounding resistances
从图12可以看出,继电器线圈电压波动不仅出现在系统绝缘监测装置中切换桥电阻投切时,也会出现在发生接地的瞬间,但接地电阻阻值越大,后者的波动幅度越小,因此,其引起的继电器误动作主要是发生在低阻值接地状况下。采集波形的极值点并绘制出如图13所示的接地瞬间线圈电压最大值Ujmax1与Rd的关系曲线,而图14则为切换桥电阻投切时,线圈电压最大Ujmax2和最小值Ujmin与Rd的关系曲线。
从图14可知,Ujmin虽然有明显的变化,但其并不能达到继电器的动作电压,因此不会引起误动作。当接地电阻Rd在0 kΩ~100 kΩ时,Ujmax2随着Rd增大而明显增大,并很快达到动作电压;当Rd大于100 kΩ时,接地电阻对于平衡桥电阻的端电压分配影响较小,Ujmax2趋于稳定,因此,这种情况引起的继电器开关误动作主要发生在高阻接地的状态下。

图13 Ujmax1与Rd的关系图Fig.13 Relationship curve between Ujmax1 and Rd

图14 Ujmax2和Ujmin与Rd的关系曲线Fig.14 Relationship curve between Ujmax2,Ujmax1 and Rd
3.2 分布电容对继电器误动作的影响
由于电路的分布特点而具有的电容叫分布电容。在直流系统中,分布电容的存在对经长电缆跳闸的回路和出口继电器误动作都有很大的影响。下图是继电器线圈两端最大电压与分布电容值的关系曲线。

图15 Ujmax与C3的关系曲线Fig.15 Relationship curve between Ujmax and C3
如图15所示,继电线圈最大电压Ujmax随着分布电容C3的增大而先增后减,而且在C3为30μF~350μF间,继电器线圈的上的电压均有可能会超过继电器的动作电压,从而引起误动作。在变电站直流系统中,往往会因为设备老旧或地面潮湿的外界因素导致电容的增大,因此,根据实际情况,预留一定的余量,减少继电引起的误动作。
4 结束语
在发生电阻接地的变电站直流系统中,系统绝缘检测装置中的切换桥电阻投切时,引起继电器线圈端电压超过动作值而引发的开关误动作,从而带来安全隐患。
本文搭建直流系统负极接地的半实物仿真平台用于模拟系统故障状态,直接采用实物继电器与仿真模型相连接,在减少对继电器进行仿真建模的同时,也能够实时展现实物继电器的动作全过程,便于观察分析。同时,对比文中所搭建的半实物仿真和全模型仿真的结果可知,前者造成继电器线圈电压波动明显大于后者,引起实际继电器动作的可能性也可能会更大,因此需要根据工程人员更大范围地调整系统参数才能降低电压波动,从而减小继电器误动作的可能性。最后利用该平台,分析了接地电阻和分布电容两个重要参数对继电器误动作的影响,并得到了不同参数与继电线圈最大电压波动的关系曲线,这对于实际调试有一定的参考价值。
后续可利用搭建的半实物仿真平台研究不同系统参数对于继电器误动作的影响,达到通过调整变电站直流系统中各项参数去减少继电器误动作的目标。
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10 09:37:34
河北电力技术(2021年2期)2021-07-29 09:16:34
铁道通信信号(2020年8期)2020-02-06 09:13:22
电子测试(2018年22期)2018-12-19 05:12:42
作文小学中年级(2018年10期)2018-10-29 02:06:50
电子制作(2018年1期)2018-04-04 01:48:26
上海铁道增刊(2017年3期)2018-01-22 03:00:59
黑龙江电力(2017年1期)2017-05-17 04:25:14
湖南农业(2016年3期)2016-06-05 09:37:36
电子制作(2016年23期)2016-05-17 03:53:43