
水果采摘机器人自主寻径避障轨迹优化研究—基于启发式智能算法
2017-12-16 09:02申一歌
农机化研究 2017年7期
袁 铸,申一歌
(河南工业职业技术学院,河南 南阳 473000)
水果采摘机器人自主寻径避障轨迹优化研究—基于启发式智能算法
袁 铸,申一歌
(河南工业职业技术学院,河南 南阳 473000)
寻径避障是水果采摘机器人中一个重要的经典问题。随着我国机械自动化、计算机控制系统和测试计量行业突飞猛进的发展,对水果采摘机器人自主寻径避障有了更高的要求。为了更好地满足现代农业种植生产的需要,启发式智能学习型寻径避障成为采摘机器人研究的热点。为此,基于启发性智能轨迹优化算法,采用传感器检测系统,设计和研究了水果采摘机器人自主寻径避障系统,并利用MatLab仿真软件进行了验证分析。结果表明:在复杂路况环境下,针对不同目标和路径要求,该采摘机器人能灵活避开作业途径中障碍物,具有很强的学习和适应能力,且系统运行稳定、可靠性强。
采摘机器人;寻径避障;智能轨迹优化;Matlab
0 引言
随着集成电路、人工智能和自动化技术的快速发展,机器人研究获得了巨大突破,工业机器人的研究获得了很大成功,机器人在农业上的应用也有了很大进展。在机器人的研究设计中,寻径避障是重要的环节之一,是机器人路径优化的基础。目前,对于机器人寻径避障和轨迹优化的研究方法有很多,主要采用蚁群、Hopfield、差异演化、遗传、BP网络神经及人工势场等算法。本文提出用启发性智能轨迹优化方法解决水果采摘机器人寻径避障的问题,采用传感器系统感测周围环境信息,通过归一化信息处理技术,使采摘机器人具有在线学习和适应的能力,并为其提供路径规划及躲避障碍的策略。
1 启发式智能轨迹优化算法
启发式算法是基于直观或者长期积累经验构造的算法,可以根据具体问题,在条件允许的代价(时间、空间)下,给出一个解决问题的有效解。该有效解与最优解之间存在一定误差值,且事先不一定可以预估。启发式算法是一种技术,一般不能在可接受的计算支出内求出最优解。
启发式智能轨迹优化算法是启发式算法与自适应算法的结合,是自适应轨迹优化里一个基本扩展结构,其结构主要由执行网络和判断网络组成。启发式智能轨迹优化算法结构如图1所示。
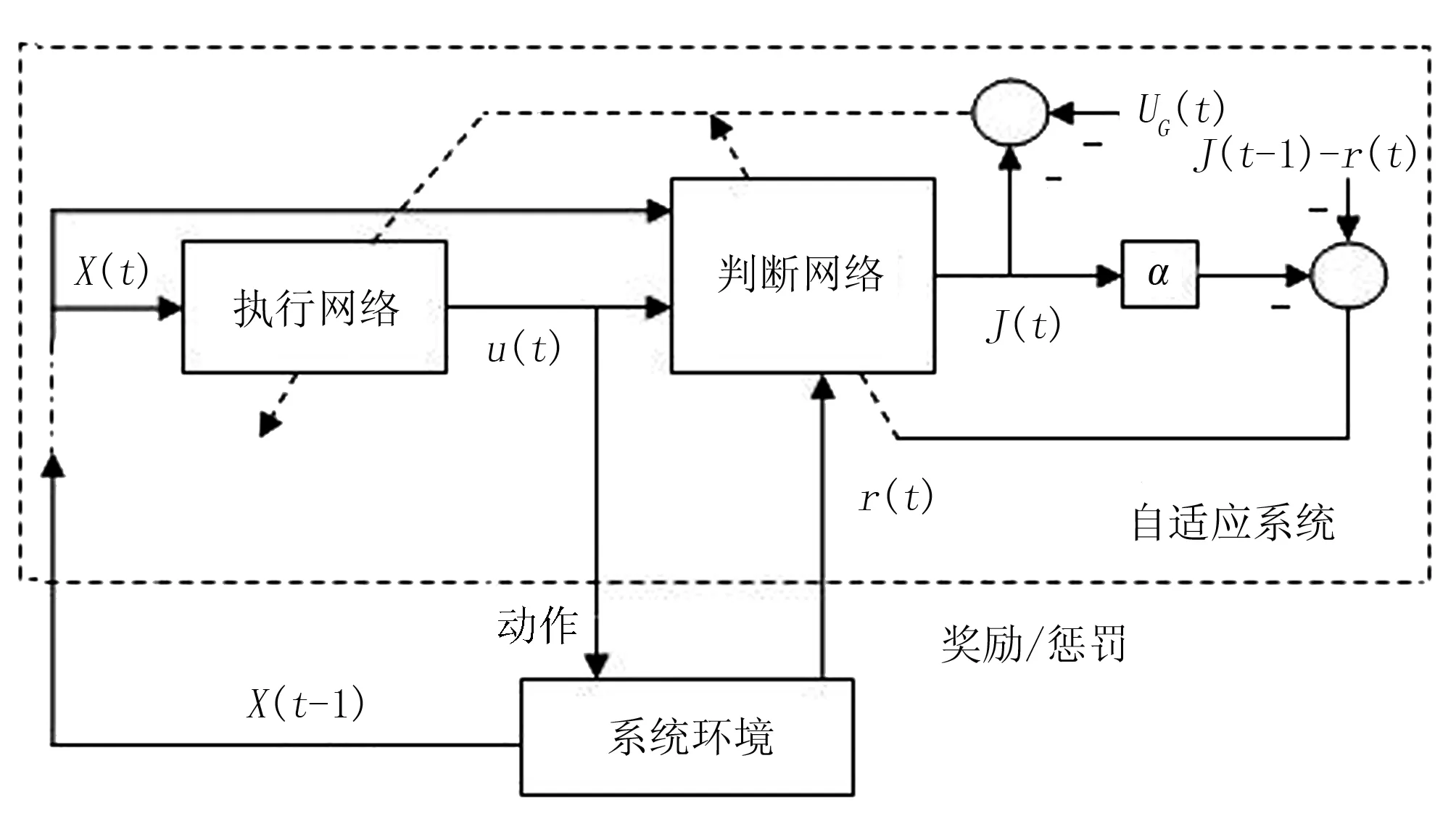
图1 启发式智能轨迹优化算法结构图
系统的执行策略主要由执行网络提供,判断网络则负责对当前执行策略实行判断。启发式智能轨迹优化算法具体原理:
1)执行和判断两者都有核心神经网络,且该神经网络为多层感知机;
2)执行网络根据当前采集的状态量X(t),为感知机构提供一个执行量u(t);
3)判断机构根据X(t)和u(t)进行判断,然后自适应系统根据强化信号r(t),求出代价函数J(t),并优化执行量;
4)自适应系统根据梯度下降法对执行和判断两个网络实行反馈调节,优化执行量u(t)。
在t时刻,代价函数的公式为
(1)
其中,X(t)为系统当前值;u(t)为自适应系统信号输出值;α为比例因子(0<α<1)。
执行网络的误差为
ea(t)=J(t)-Uc
(2)
(3)
为了尽量减少误差Ea(t),需迫使J(t)和Uc尽可能的接近。执行网络中核心神经网络的跟新原则为
wa(t+1)=wa(t)+Δwa(t)
(4)
(5)
(6)
其中,wa(t)为执行网络的权值;la(t)为执行网络的自适应能力值,la(t)是大于0的值。
在t时刻,判断网络中折扣累加值R(t)为
(7)
其中,r(t-1)为t-1时刻判断网络的强化信号值。
判断网络反馈调节系统采用J(t)近似R(t),其误差为
ec(t)=αJ(t)-[J(t-1)-r(t)]
(8)
(9)
为了尽量减少判断误差Ec(t),执行网络中核心神经网络的跟新原则为
wc(t+1)=wc(t)+Δwc(t)
(10)
(11)
(12)
其中,wc(t)为判断网络的权值;lc(t)为判断网络的自适应能力值,lc(t)是大于0的值。
2 水果采摘机器人路径规划的数学分析
水果采摘机器人是一个没有完整约束条件的系统,研究其寻径、避障等路径规划问题需要建立一个完整数学模型,并对此进行数学分析。在现实生活中,很多控制系统不仅要考虑系统内部的参数因素,还要对非内部环境(即外部环境)进行考虑,这类统称为非完整约束性系统。机器人工作环境复杂多变,影响因素多,是典型的非完整约束性系统。
对于非完整约束性系统,力学方程表达式为
B(q)T-AT(q)λ
(13)
其中,M(q)为n×n阶的正定矩阵;q为状态向量;Vm为哥氏向心力;B(q)为变化矩阵。
选择一组零空间的向量基,可以得出
A(q)S(q)=0
(14)
令v=(v1,v2,…,vn-m)T带入式(13)中,得
(15)
对等式(15)两边同时求导得到

(16)
简化后有
(17)
对于驱动系统独立的水果采摘机器人,机器人运动坐标如图2所示。

图2 机器人运动坐标图
机器人以重心作为参考点的运动方程式为
(18)
动力学方程为
xsinθ-ysinθ=0
(19)
水果采摘机器人是否可控是解决寻径、避障等路径问题的重要因素,检验该系统可控的具体方程为rank[s1,s2,[s1,s2,],[s1,[s1,s2,]],[s2,[s1,s2,]]…]
=3
(20)
由机器人运动学方程

(21)
3 自主寻径避障的设计
3.1 采摘机器人传感器系统的设计
本水果采摘机器人采用启发性智能轨迹优化方法解决其寻径避障的问题,利用传感器网络组成的系统感测周围环境信息,为机器人提供路径规划、躲避障碍的策略。采摘机器人传感器系统框架图,如图3所示。
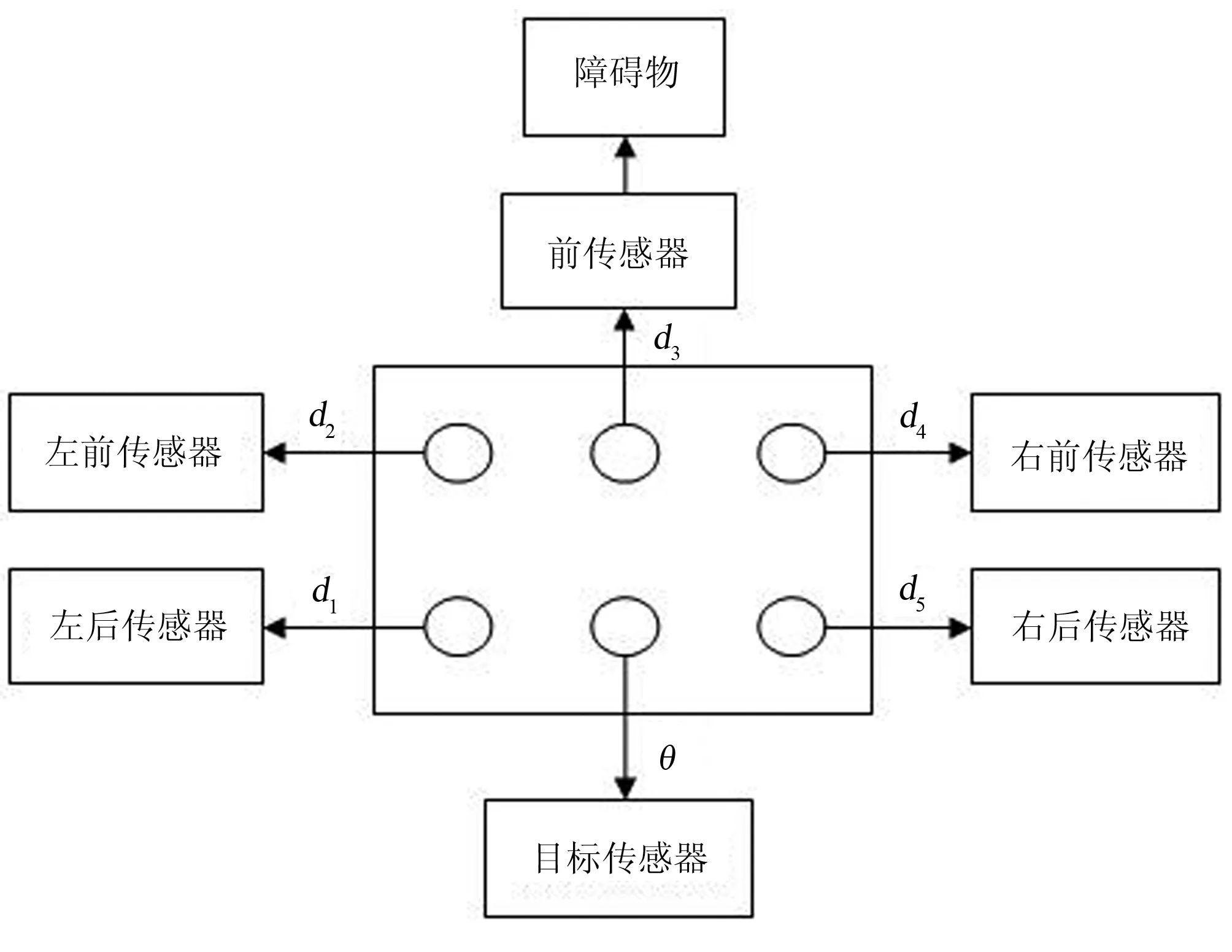
图3 机器人传感器系统框架图
该机器人传感器系统由6个传感器设备组成,除目标传感器外,其他5个都是测量距离的,主要用来判断机器人与周边环境的间隔状态,其测量范围均为10m。目标传感器用来感知目标,感知机器人与目标的距离和角度,为系统提供目标物体的大致方位,以便其自主寻径避障。
在机器人移动过程中,为了区分障碍物与目标,将障碍物和目标设置为不同物体,并用参数ρ表示检测状态:目标传感器检测到目标时,ρ=1,检测到障碍物时ρ=-1,阶段检测过程中未搜索到目标和障碍物对ρ=0。
3.2 水果采摘机器人启发式学习系统的设计
水果采摘机器人启发式学习系统以传感器检测参数为判断标准,将测量值作归一化方法处理,并作为自适应学习的信号输入。
传感器系统测量障碍物距离为
(22)
检测系统中测量的距离di用-1,0,1表示。其中,xi=1表示采摘机器人达到目的地;xi=0表示在阶段检测过程中未搜索到目标和障碍物;xi=-1表示采摘机器人在行进过程中碰到障碍物。
传感器系统测量目标时,有
Δθ=θ1-θ2
(23)
(24)
其中,θ1为机器人移动方向与水平方向之间的偏移角度;θ2为机器人移动方向与目标物体方向之间的夹角。当θ=1时,说明机器人正在向目标物体靠近;θ=-1,说明机器人正在远离目标物体。
执行网络对机器人移动方向进行修改时,其决策动作根据u(t)的值来调整,当u(t)>0时,移动方向偏转-5°(向左);当u(t)<0时,移动方向偏转-5°(向右);当u(t)=0时;保持移动方向不变继续前进。
设计强化信号时,要先区分检测的物体是障碍物还是目标,用分析函数e(x)表示,有
(25)
由式(25)可以看出:当检测到的是目标时,xi取最大值;当检测到的是障碍物时,xi取最小值。
系统是优先规划路径还是优先躲避障碍物的决策问题,应先考虑障碍物,当检测到障碍物时,优先考虑避开障碍物;当检测范围内没有障碍物时优先考虑路径规划。
4 实验与结果分析
为了验证水果采摘机器人自主寻径避障系统的学习能力及可靠性,本文对该系统进行了仿真实验。仿真实验在MatLab仿真平台上进行,设置步长为0.03,启发式智能轨迹优化算法的执行和判断网络的权值范围为-1至1之间。实验目的是,在复杂的作业环境中,该系统通过改变执行和判断网络的初始权值,验证采摘机器人是否能够通过自适应学习,躲避障碍物,成功到达目的地。因此,本文设计了目的地和起点都不同的两种仿真实验。
1)第1种实验:在同一起点、不同目标的周边环境下进行仿真实验,机器人的起始点为(10,5),3个目标分别为(20,45)、(42,46)、(43,30),利用自主寻径避障系统的学习方法,采摘机器人随机选取移动方向,验证是否可以达到对应终点。MatLab软件进行仿真的结果如图4所示。
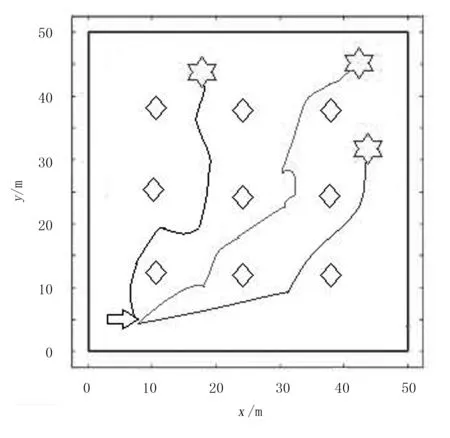
图4 同一起点、不同目标的仿真结果
采摘机器人在移动过程中,尽管目标地点不同,但仍可以成功绕过障碍物并到达终点,在整个实验中,没有发生碰撞行为。
2)第2种实验:在4个不同起点、同一目标的周边环境下进行仿真实验,机器人的起始点为分别为(10,5)、(10,32)、(35,5)、(45,18),目标为(42,45)。MatLab软件进行仿真的结果如图5所示。

图5 不同起点、同一目标的仿真结果
尽管起始点地点不同,但仍可以成功绕过障碍物并到达终点,且无任何碰撞。
5 结论
针对水果采摘机器人在采摘作业过程中行走路径过长、途中障碍物多的问题,以采摘机器人寻径避障为研究对象,加入自适应学习方法,采用启发式智能规划算法对水果采摘机器人的路径进行优化,并利用MatLab平台进行仿真实验,对机器人寻径避障能力进行验证。结果表明:在不同目标和路径要求的情况下,该采摘机器人能灵活避开作业途径中障碍物,并对行进轨迹进行有效优化,且路径优化能力强,运动轨迹平滑,可靠性强、稳定性好。
[1] 戚利勇.黄瓜采摘机器人视觉关键技术及系统研究[D].杭州:浙江工业大学,2011.
[2] 叶涛.在圆形Packing及团簇结构优化问题上的启发式优化算法研究[D].武汉:华中科技大学,2012.
[3] 吕继东.苹果采摘机器人视觉测量与避障控制研究[D].镇江:江苏大学,2012.
[4] 张鑫.移动机器人导航中的轨迹跟踪与群集运动控制研究[D].西安:长安大学,2012.
[5] 纪超.温室果蔬采摘机器人视觉信息获取方法及样机系统研究[D].北京:中国农业大学,2014.
[6] 李占坤.果树采摘机器人控制系统研究与设计[D]. 镇江:江苏大学,2010.
[7] 张向珂.采摘机械手障碍信息探测及避障技术研究[D]. 镇江:江苏大学,2010.
[8] 付中军.果蔬采摘机器人视觉技术研究及系统构建[D].沈阳:沈阳工业大学,2014.
[9] 丁亚兰.基于机器视觉的猕猴桃果实识别与定位关键技术研究[D].杨凌:西北农林科技大学,2009.
[10] 丁小辉.复杂环境下移动机器人路径规划新算法的研究[D].北京:北京邮电大学,2010.
[11] 王锋.基于立体视觉与SBL-PRM算法的自主收获机器人路径规划[D]. 镇江:江苏大学,2010.
[12] 白金柯.移动机器人路径规划研究[D].郑州:河南大学,2011.
[13] 崔玉洁,张祖立,白晓虎.采摘机器人的研究进展与现状分析[J].农机化研究,2007(2):4-7.
[14] 宋健,张铁中,徐丽明,等.果蔬采摘机器人研究进展与展望[J].农业机械学报,2006(5):158- 162.
[15] 黄炳强,曹广益.基于人工势场法的移动机器人路径规划研究[J].计算机工程与应用,2006(27):26- 28.
[16] 付宗国,王丽.基于ATmega32的遥控采摘机器人设计[J].电子设计工程,2012(4):151-154.
[17] 陈善峰,尹建军,王玉飞,等.果实采摘机械手多关节求解方法与避障规划[J].农机化研究, 2012,34(7):24-28.
[18] 顾宝兴,姬长英,王海青,等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012(6):153-160.
[19] 王力立,徐志良,吴晓蓓,等.感知能力异构的无线传感器网络优化部署机制[J].南京理工大学学报,2012(3):408-413.
[20] 方啸,郑德忠.移动机器人自主寻路避障启发式动态规划算法[J].农业机械学报,2014(7):73-78.
[21] 苗建伟,杨铁宝,曾林森.一种六自由度机械手的智能轨迹规划[J].组合机床与自动化加工技术, 2014(9):73-76.
[22] 王显. 智能清扫机器人路径规划及自动充电系统研究[D].郑州:郑州大学,2014.
[23] 史庆军,刘军福,曾长安.基于MATLAB的通信系统动态仿真研究[J].佳木斯大学学报:自然科学版,2000(3):269-271.
[24] 姚靖靖.移动机器人无线监控系统设计与避障路径规划研究[D].南昌:南昌大学,2011.
[25] 刘关俊.基于粒子群算法的移动机器人路径规划研究[D].长沙:中南大学,2007.
[26] 刘亮.基于势场蚁群算法的移动机器人路径规划研究[D].长沙:南昌大学,2013.
[27] 王燕,张果,葛运旺. 四自由度关节型采摘机械手轨迹规划与实验研究[J].现代制造工程,2013(7): 27-31.
Research on Trajectory Optimization of Self-seeking Path and Obstacle Avoidance for Fruit-picking Robot Based on Heuristic Intelligent Algorithm
Yuan Zhu, Shen Yige
(Henan Polytechnic Institute, Nanyang 473000, China)
The path avoiding obstacle is an important classical problem in fruit picking robot.With the rapid development of mechanical automation, computer control system and testing industry in China, there is a higher requirement for the self-seeking and obstacle avoidance of fruit picking robot. In order to better meet the needs of modern agricultural production, it has become a hot spot for the heuristic intelligent learning algorithm to avoid obstacles in the research of picking robot. In this paper, based on the heuristic intelligent trajectory optimization algorithm, by using the sensor detection system, it designed the fruit picking robot to find the path of obstacle avoidance system,used Matlab simulation software to verify the analysis.The results show that under the complicated road environment, according to the requirements of different target and path, the picking robot can be flexible to avoid obstacles in the way, with a strong learning and adaptive ability and system operation is stable, and its reliability is strong.
picking robot; path avoiding obstacle; intelligent trajectory optimization; Matlab
2016-05-05
河南省自然科学基金项目(2015GZC155);南阳市科技攻关项目(KJGG36)
袁 铸(1982-),男,河南南阳人,讲师,硕士。
申一歌(1982-),女,河南南阳人,讲师,硕士研究生,(E-mail)yuanzhu1982@hnpi.cn。
TP242.6 ;S225.93
A
1003-188X(2017)07-0204-05
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
