
基于HSV空间再生稻植株与土壤背景图像分割
2017-12-16 09:02:31郭翰林
农机化研究 2017年7期
郭翰林, 林 建 ,张 翔
(福建农林大学 机电工程学院,福州 350002)
基于HSV空间再生稻植株与土壤背景图像分割
郭翰林, 林 建 ,张 翔
(福建农林大学 机电工程学院,福州 350002)
针对再生稻收割机视觉导航的稻田图像分割问题,结合再生稻植株的生长特点和再生稻避莊的要求,利用相机于农田采集再生稻图片,结合RGB、HSV、YCrCb空间中的常用灰度化因子,进行灰度化对比试验并分析其直方图特征,得出在HSV空间的S分量灰度化;采用最大类间方差法(Otsu)得到初步分割阈值T,经进一步分析为保留较完整的不同成熟度再生稻植株特征,加入修正因子 - a得到阈值T - a 对图像二值化;再通过数学形态学,面积法过滤等后续处理,形成收割机行走的左右边界区域。结果表明:处理1副像素419×310的图像平均耗时0.053 s,可满足今后的实时性要求,分割出的图像基本上反应了再生稻植株的走势特征,与人眼判断植株边缘位置基本相符合。
再生稻;农田环境;HSV颜色空间;图像分割
0 引言
农业机器人视觉导航的首要问题是找到一种适合于农田环境下将作物从土壤背景中识别出来的方法[1],因此将再生稻植株从土壤中分割出来是视觉导航的关键。图像分割是图像分析和模式识别的首要问题,也是图像处理的经典难题之一,是机器视觉的重要组成部分[2]。目前,在农田中的应用多见于表层视野范围内采集图像,分割目标农作物和非目标植物(如杂草)、作物行和垄行[3],较少涉及深入中低层进行采集图像的应用。文献[4]提出了在HSV颜色空间,将外层视野范围内采集的图像,利用遗传算法进行植物和背景的分割,但对解决植物叶片交叠情况的效果不佳。文献[5]将摄像机安装在收割机顶部采集图像,根据农田中作物未收获区域和已经收获区域RGB空间中R分量灰度变换明显,提出在RGB 空间中选择 R 分量对图像进行灰度处理分割图像。文献[6]在水田整体视野内采集图像,除草机器人针对不同时期水田秧苗图像的颜色特征进行分析,采用4个颜色特征因子灰度化彩色图像,并进行秧苗特征提取。文献[2]研究了中低层桑树图像特点,采用区域生长的方法分割桑树与路径;但其研究的对象行间距较大,图像边界清晰,视野范围内采集的图像易于处理。
随着视觉应用的推广,对农田作物进行诸如施肥、除草、灌溉等操作时, 机器人可能需要深入作物行的中低层行走,视觉导航具有信息探测范围宽、目标信息完整、适应能力强等优势,便于获取导航图像进行预处理而后导航[7]。再生稻的特点是在一季稻成熟之后,大约只割下植株上2/3的部位,收取稻穗,保留下面的1/3植株[8]。这就要求收割机行走轮尽量减少碾压嫩芽稻莊。因此,需要深入再生稻中底采集路径信息规划导航线。由于头季再生稻收割时,采用的是排水烤田以利于收割机行走,因此形成的稻田图像背景主要是棕褐色路面干泥。结合中低层水稻植株本身具有的复杂性、稻叶生长的不确定性和反光导致的模糊性等特点,提出在再生稻植株图像中运用HSV颜色空间的S分量灰度化,并采用修正阈值二值化灰度图以保留更完整植株特征,进行一系列的降噪处理,实现再生稻植株和路径的分割,为后续导航线拟合算法奠定了基础。
1 采集图像
为减少算法开发周期,采用普通数码相机于福建省农业科学院水稻研究所再生稻试验田(福州市仓山区盖山镇),如图1(a)所示。由于不可避免自然环境中的噪声、局部光照不均匀、阴影遮挡和再生稻叶子交叠等干扰,采集到的图像信息比较复杂。经实地考查,再生稻规则成行育秧,中低层的再生稻植株边界和图像路径相对清晰,有利于图像分割,如图1(b)所示。将拍摄相机深入再生稻植株中低层,以不同的拍摄角度和离地高度,静态采集再生稻图像。由 PC 机完成算法开发,其配置为Intel Core( TM) 2、CPU2.0 GHz、 内存 2GB,基于Window 7操作系统,编程工具为Visual Studio 2010 + Opencv2.4.8。

(a) 试验田图像 (b) 中低层再生稻植株
2 图像分割
2.1 颜色空间分析
利用颜色信息进行初始分割,首先需选择恰当的颜色空间。在 RGB颜色空间中R、G、B3种颜色的亮度值随光照强度的不同而改变,因此该模型易受光照条件的影响[8]。在YCrCb颜色模型中,由于Y分量容易受光照变换的影响,且Cr、Cb颜色分量有重叠区域[9],再生稻植株具有不同成熟度茎叶的特点不易进
行良好的识别。HSV空间是根据颜色的直观特性由Smith 于 1978 年创建的一种颜色空间[10]。HSV颜色模型的3分量具有相对独立性,对于一些受光照条件影响大的图像就可以避免V分量,只考虑H和S分量,使得图像处理的时候针对性更强[11]。在HSV颜色空间中,路径区域的S分量与再生稻区域的S分量有明显的差别,因此选取HSV颜色空间进行目标识别。
2.2 灰度化处理与分析
在上述颜色模型的分析基础上,将图1(b)在RGB空间转换到HSV,如图2(a)所示,YCrCb空间,如图2(b)所示。同时,运用RGB、HSV、YCrCb中的常用灰度化因子,对图1(b)分别在RGB空间的2G-R-B特征因子、HSV空间的S分量、 YCrCb空间的Cb分量,进行灰度化对比试验和分析,其直方图特征,如图3所示。

(a) HIS空间图像 (b) YCrCb空间图像
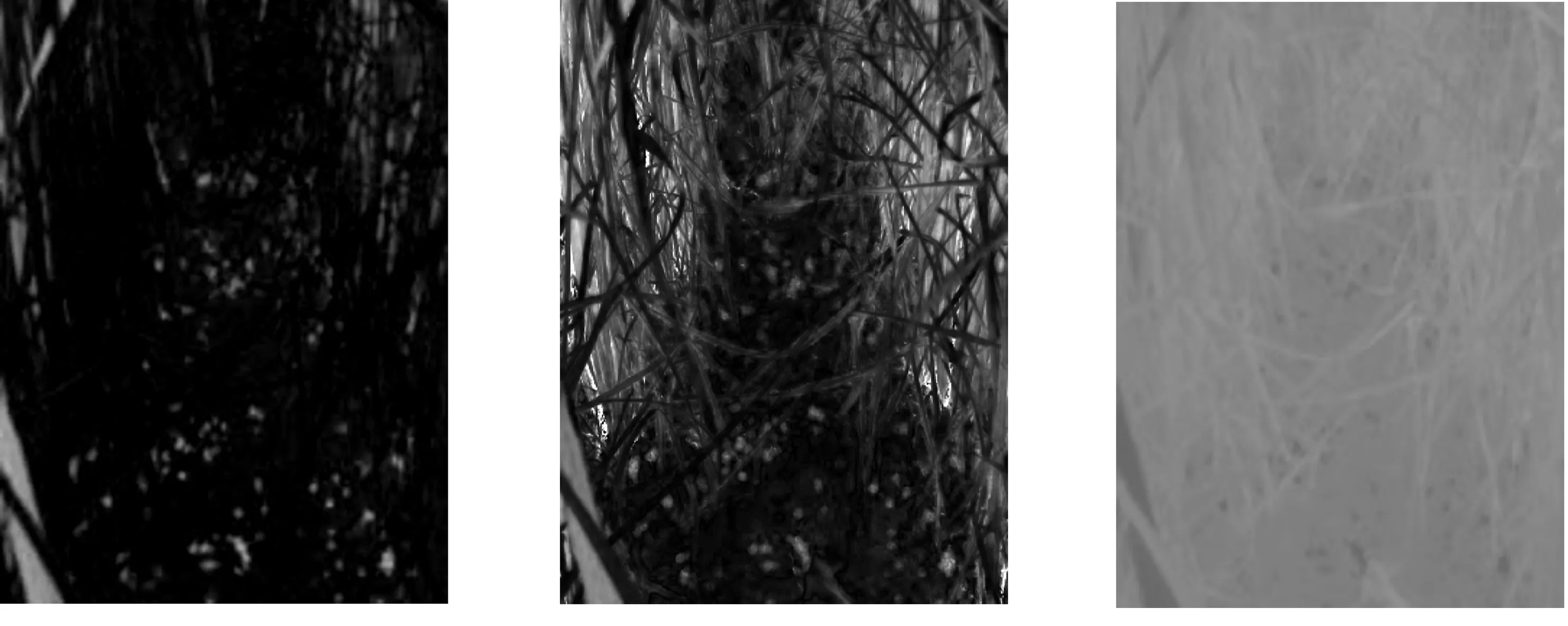
(a) 2G-R-B因子 (b) S分量 (c) Cb分量
结果表明:2G-R-B特征因子虽提取植株的绿色特征,但在存有枯黄茎叶干扰的情况下,易丢失了植株的大部分特征;Cb分量图像虽然突出了部分作物区域,但再生稻植株区域和路径区域的差异仍比较小;在HSV中的S分量灰度化效果较好,整个灰度空间被分为灰度值具有明显差异的再生稻植株区域和路径区域,因此可利用S分量饱和度差异将路径从复杂的图像信息中分割出来。对灰度化处理后的图像分别求其直方图,如图4所示。
从灰度化后的直方图来看:①2G-R-B因子灰度化后的图像直方图灰度值主要集中在低级数段,主要代表土壤等深色背景,少数部分高灰度级段表示偏绿色的叶子茎秆。但不足以体现大部分保持植株特征。②经S分量灰度化后的图像直方图,灰度级由低到高时,体现再生稻植株成熟过程的渐变性,易于取得阈值实现植物与土壤的分割。③经Cb分量灰度化后的图像直方图大多数呈现单峰值,即再生稻植株和路径没有明显的灰度级差别[11]。由此表明:选择S分量灰度化的分割的效果优于Cb分量,且避免了颜色相近和照度不均匀的影响。因此,在后续处理中选用S分量分割图像,也显示了颜色空间选择的合理性。

(a) 2G-R-B因子 (b) S分量 (c) Cb分量
2.3 大津法阈值选取


σ2=ω0(μ0-μ)2+ω1(μ1-μ)2=ω0ω1(μ1-μ0)2
由于h∈{1,2,3,…,k},并且使得方差取得最大值maxσ2(h)时h即为最佳阈值。设以该算法得到S分量灰度图的最佳阈值T,以T二值化图像,如图5(b)所示。同时,二值化2G-R-B灰度图和Cb灰度图,如图5所示。
结合S分量的直方图特征图4(b), 二值化时适当降低分割阈值有助于保持植株的特征,降低不同成熟度茎叶的干扰。因此,对分割阈值加入修正因子-a,以T - a为阈值二值化S分量图。经多幅图像试验,a取12可以达到较为满意结果,如图6所示。农田图像总体上被分为区别明显的白色植株区域和黑色土壤路径区域。该法保留了更多稻莊茎秆信息,有助于形成植株的左右边界,体现再生稻的走势特征。
2.4 降噪等后续处理
得到二值图像后,植株区域出现黑色空洞和路径区域出现白色点状噪声,特别是排水烤田后土壤长出的幼小绿色杂草带来的噪声。这些噪声对后续导航参数提取有很大的影响,故需有效去除分散的噪声区域。由于植株间存在较多间隙和稻叶交叠现象,经试验采用开闭运算交叉实验,结果易偏离再生稻植株的走势特征,难以达到好的处理效果。经分析首先用7×7方形结构元素膨胀扩大区域的连通性[15],然后采用连通域面积去噪法[9](取代闭运算,不易改变再生稻走势特征),面积TH 1取800个像素点能得到较好的效果;最后,用5×5结构元素进行形态学闭运算进一步去除噪声结果,如图7所示。
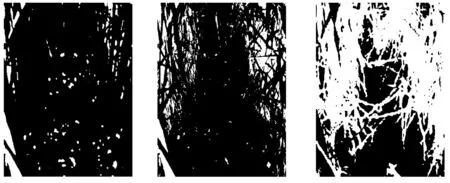
(a) 2G-R-B因子 (b) S分量 (c) Cb分量

图6 修正阈值的二值化图像

图7 去噪声后的图像
3 试验与分析
为了验证本文算法的有效性,试验选取了农田拍摄的较有代表性的5幅图像,如图8(a)所示;分割试验结果,如图8(b)所示。试验表明:该算法对中低层采集的、存在不同成熟度茎叶的再生稻图片分割具有较好的适应性,能有效分割出再生稻植株和路径区域,形成再生稻植株的左右边界区域。算法运行时间,如表1所示。

表1 图像分割耗时
经过多幅图像分割试验,本研究提出的方法可以较好地检测出饱和度变化强烈的区域,对不同成熟的植株茎叶变化比较不敏感,受光照影响较小,对交叠现象的稻叶有较好适应性。分割效果符合人眼的感官判断,与人工判断左右边界位置和中间路径位置基本相符,基本上可以分割出作为边界的再生稻植株,为收割机行走轮规划出行走路径打下良好基础。
在土壤路径区域出现较大的点状噪声,主要是受新长出来的杂草幼苗和部分稻叶的干扰。植株区域出现较大的空洞主要是受叶子生长的不确定性和植株间存在一定间隙的影响。同时,还存在稻叶反光交叠、土壤裂缝及作物残渣等的影响。
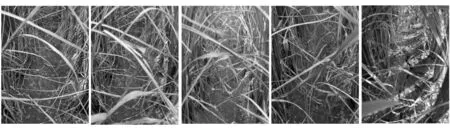
1 2 3 4 5

1 2 3 4 5
4 结论
分析了选择HSV颜色模型并以S分量灰度化再生稻图像,利用加入修正因子的阈值二值化图像,能有效分割出再生稻植株和路径,并采取了一系列降噪处理方法,提高分割效果,形成了适于收割机行走的左右边界区域,为后续导航线拟合算法奠定了基础。但由于受再生稻自身生长不确定性和作业时农田周围风力等的影响,植株的稻叶表现出一定的随机性,当交叠严重时该算法的分割效果降低。因此,研究图像稻叶和茎秆的像素特征,提高抗干扰性,提高分割精度将是今后的研究重点。
[1] 孙元义,张绍磊,李伟.棉田喷药农业机器人的导航路径识别[J].清华大学学报:自然科学版,2007(2):206-209.
[2] 吴佳艺.基于机器视觉的农林环境导航路径生成算法研究[D].杭州:浙江工业大学,2009.
[3] 曹倩,王库,杨永辉,等.基于TMS320DM642的农业机器人视觉导航路径检测[J].农业机械学报,2009(7):171-175.
[4] TANGL,TIANL,STEWARDBL.Color image segmentation with genetic algorithm for in-field weed sensing[J].Transaction of the ASAE,2000,43(4):1019-1027.
[5] 吴刚,谭彧,郑永军,等.基于机器视觉的谷物联合收割机行走目标直线检测[J].农业机械学报,2012(S1):266-270.
[6] 黄小刚.水田除草机器人视觉导航路径与参数获取方法研究[D].广州:华南理工大学,2013.
[7] 杨庆华,吴佳艺,鲍官军,等.农林环境机器视觉导航路径生成算法及应用[J].农业机械学报,2009(3):147-151.
[8] 朱鸿,陈鸿飞.福建省再生稻研究现状与展望[J].亚热带农业研究,2006(3):170-175.
[9] 赵德升.基于机器视觉的精确喷施智能除草装置杂草实时识别技术[D].镇江:江苏大学,2009.
[10] 任磊,赖惠成,陈钦政,等.基于改进K均值聚类与HSV模型的棉花分割算法[J].计算机工程与设计,2013(5):1772-1776.
[11] 兰红,胡涵.结合HSV空间的改进二维Otsu免疫组化图像分割[J].计算机应用与软件,2016(5):200-203.
[12] 赵德升.基于机器视觉的精确喷施智能除草装置杂草实时识别技术[D].镇江:江苏大学,2009.
[13] Otsu.A threshold selection method from gray-lever histogram[J].IEEE Trans on SMC,1979,29(1):62-66.
[14] 张振升,朱名日.基于HSI颜色空间的蔗糖结晶图像分割方法[J].计算机工程与应用,2011(11):190-193.
[15] 冈萨雷斯.数字图像处理(2 版)[M].阮秋奇,译.北京:电子工业出版社,2003.
Image Segmentation for Identifying Ratooning Rice Area from Soil Background Based on HSV Space
Guo Hanlin, Lin Jian, Zhang Xiang
(College of Mechanical and Electronic Engineering,Fujian Agriculture and Forestry University,Fuzhou 350002,China)
For the issue of image segmentation in the ratooning rice field to the vision navigation of the harvester, combined with the growth characteristics of the plant and the requirement to avoid ratooning rice, a method to the image was proposed. Taking the picture from field environment, combained with the commonly gray scale factor in the RGB、HSV、YCrCb color space, the contrast testing about graying image was took, and the histogram features was analysised. It was varianted in S characteristic by HSV space, and combined with the Otsu to get the initial segmentation threshold T. In order to maintain the integrity of the characteristics in the ratooning rice area with different maturity, the modified factor -awas added to get the segmentation threshold T-a. Then the graying image was binarized by the modified threshold, and used the mathematical morphology , filtered the small area with other subsequent process. Finally, the left and right boundary region to the harvester was formed. The results demonstrate that the average time of processing a 419×310 pixel image was 0.053s and met the need of real-time in the future. The segmented image basically reflected the trend characteristics of the ratooning rice area, which was consistent with the human vision to identify the edge position of the plant.
ratooning rice; cropland field; HSV color space; image segmentation
2016-08-02
福建省自然科学基金项目(2016J01701);福建农林大学机械工程学科整体学科水平提升计划项目(612014049)
郭翰林(1989-),男,福建泉州人,硕士研究生,(E-mail) ffharlen@126.com。
林 建(1971-),男,福州人,副教授,硕士生导师,(E-mail) 1827740@qq.com。
S225.4;TP391.9
A
1003-188X(2017)07-0169-06
猜你喜欢
农业科技通讯(2023年1期)2023-02-12 07:09:56
农业工程学报(2022年14期)2022-10-19 01:15:54
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
基层中医药(2021年12期)2021-06-05 06:56:26
智族GQ(2019年9期)2019-10-28 08:16:21
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
农家之友(2018年12期)2018-03-12 00:50:28
纺织科学研究(2017年6期)2017-07-03 12:14:15
自动化学报(2017年5期)2017-05-14 06:20:56
