
土壤比贯入阻力测试装置研究—基于Android手机WIFI控制
2017-12-16 09:02任国强刘镇业李义德张宝鹏刘冬梅刘立意
农机化研究 2017年7期
任国强,刘镇业,李义德,张宝鹏,刘冬梅,刘立意
(东北农业大学 工程学院,哈尔滨 150030)
土壤比贯入阻力测试装置研究—基于Android手机WIFI控制
任国强,刘镇业,李义德,张宝鹏,刘冬梅,刘立意
(东北农业大学 工程学院,哈尔滨 150030)
土壤比贯入阻力是反映耕地土壤板结程度的一项重要指标。现有测量装置多采用人工手动加载测量的方式,无法依据测量标准保持恒速,准确度、自动化程度及测量效率低,且劳动强度大。为此,应用传感器技术、机械电子技术、无线通信技术,以及智能终端设备设计研制了一种基于Android手机WIFI控制的电动式土壤比贯入阻力测量装置。该装置以单片机传感器为核心,采用电机驱动实现圆锥测头按ASAE S313.3 FEB04标准以30.48mm/s恒速贯入土壤,测量数据实时显示并存储于TF卡中;初步设计实现了使用Android手机,通过WIFI通讯与测量装置建立连接、操控测量装置,接收、存储测量数据,并绘制曲线。测试结果表明:该装置结构简单、测量精度高、操作简单、自动化程度高,应用前景广阔。
比贯入阻力;土壤;阻力测试; Android手机;WIFI
0 引言
土壤是农业生产的最重要资源。随着农业机械化水平的不断提高、大型机械的使用,农田土壤机械压实、板结问题越来越严重。土壤机械压实对农业的主要危害表现为土壤容积质量增大、土壤的通气孔隙度变小、水的渗透能力降低,导致土壤地表径流变大、土壤侵蚀和流失加重;结构改变,导致土壤微生物的生物量、活性降低;土壤阻力加大,作物根系生长受阻,直接影响新陈代谢作用和营养物质的循环,进而导致作物产量降低[1-8]。因此,快速和准确测量农田土壤比贯入阻力(亦称圆锥指数Cone Index,简称 CI),获取农田土壤压实程度的空间分布信息对指导农业生产和农机耕作具有重要意义。Cater[9]开发了一种集成式土壤圆锥指数仪,包括了压力传感器、运算放大器、信号发生器及数据显示等组成部分,使其获得平均圆锥指数。1996 年,Lui 等人[10]研制了一台测试设备,利用多传感器连续采样,并可连续测试反映土壤强度的指数(TCI),获取了大量土壤压实信息,其中的变点采样为线采样。此外,通过遥感测试土壤空气渗透量等,获取土壤压实程度的方法也曾有报道[11-12]。赵新等[13-14]研制的土壤阻力信息的测试系统,可连续测试农田水平方向上的土壤阻力,以期通过对不同深度土壤阻力信息的测取和分析,获得农田土壤压实程度空间分布信息。甄文斌等[15]设计了由牵引机具、深松铲、传感器、应变仪及计算机组成的土壤耕作阻力测试系统。通过静态标定,该系统的线性度、线性迟滞均小于1%。现有测量装置或采用人工手动加载测量方式或不具有获取耕地土壤纵向(垂直方向)阻力信息。
为更方便地测量土壤比贯入阻力,获取田间土壤压实程度的空间分布信息,应用传感器技术、机械电子技术、无线通信技术和智能终端设备,设计了基于Android手机WIFI控制的土壤比贯入阻力测量装置。本设计的研究内容包括土壤比贯入阻力测量装置的原理与结构、单片机系统的硬件软件、电机驱动系统、WIFI通信系统,以及Android手机APP的设计。本设计需要达到的目标如下:
1)圆锥测头按标准恒速贯入,自动测量贯入力和贯入深度,自动存储记录,操作简便,便携性好;
2)可与Android 手机无线连接,可以通过手机端应用操作界面实现测试装置启动、停止,探测杆的上升、下降;测试结果实时显示、存储及绘制比贯入阻力与深度关系图等功能。
1 结构与工作原理
1.1 总体结构
土壤比贯入阻力测量装置主要有4部分组成:机架与支撑部分、动力传动部分、传感探测部分和测控部分,如图1所示。

1.测控表头 2.驱动电机 3.推管外套 4.蓄电池 5.应变传感器
1)机械支撑部分。机架支撑部分主要由三脚架、
固定踏板和支脚等组成。三脚架用于支撑整个动力传动部分及电源;固定踏板、支脚与三脚架装配成一体,以确保装置牢固、测量稳定。
2)动力传动部分。动力传动部分由驱动电机、丝杠、螺母及推管等组成。圆锥杆通过连接塞与推管连接;驱动电机通过滚珠丝杠带动推管实现圆锥杆的竖直进给运动,传递效率高。
3)传感探测部分。传感探测部分由光电传感器、应变传感器和圆锥杆(测杆和圆锥头)等组成。光电传感器安装在丝杠端部,用于检测圆锥杆贯入速度和深度;应变传感器配置在推管端部用于测量贯入阻力。
4)测控部分。测控部分以单片机为核心的电路,包括应变放大器、A/D转换器、LCD液晶显示器、操作按钮、无线串口模块、WIFI模块、TF存储模块和电机驱动等模块,手机终端可通过WIFI与测控部分无线连接,系统框图如图2所示。
1.2 工作原理
本装置参照ASAE S313.3 FEB04标准设计,能够精确测量耕地的比贯入阻力[16-17]。电机通过滚珠丝杠带动推管运动,实现圆锥杆的竖直匀速(30.48mm/s)进给运动。当圆锥杆贯入土壤时,国际标准的圆锥头受到的阻力通过二力杆传到顶端,再由顶端的应变式传感器测得阻力大小,并通过光电传感器测丝杠转数、计算深度,将所得的结果实时传输到单片机,经单片机处理后再在液晶显示器实时显示土壤的贯穿阻力和深度,并将数据保存在TF卡中,方便以后的使用。同时,也可将数据通过WIFI传输到手机终端存储、显示并绘制出比贯入阻力与深度的关系图。
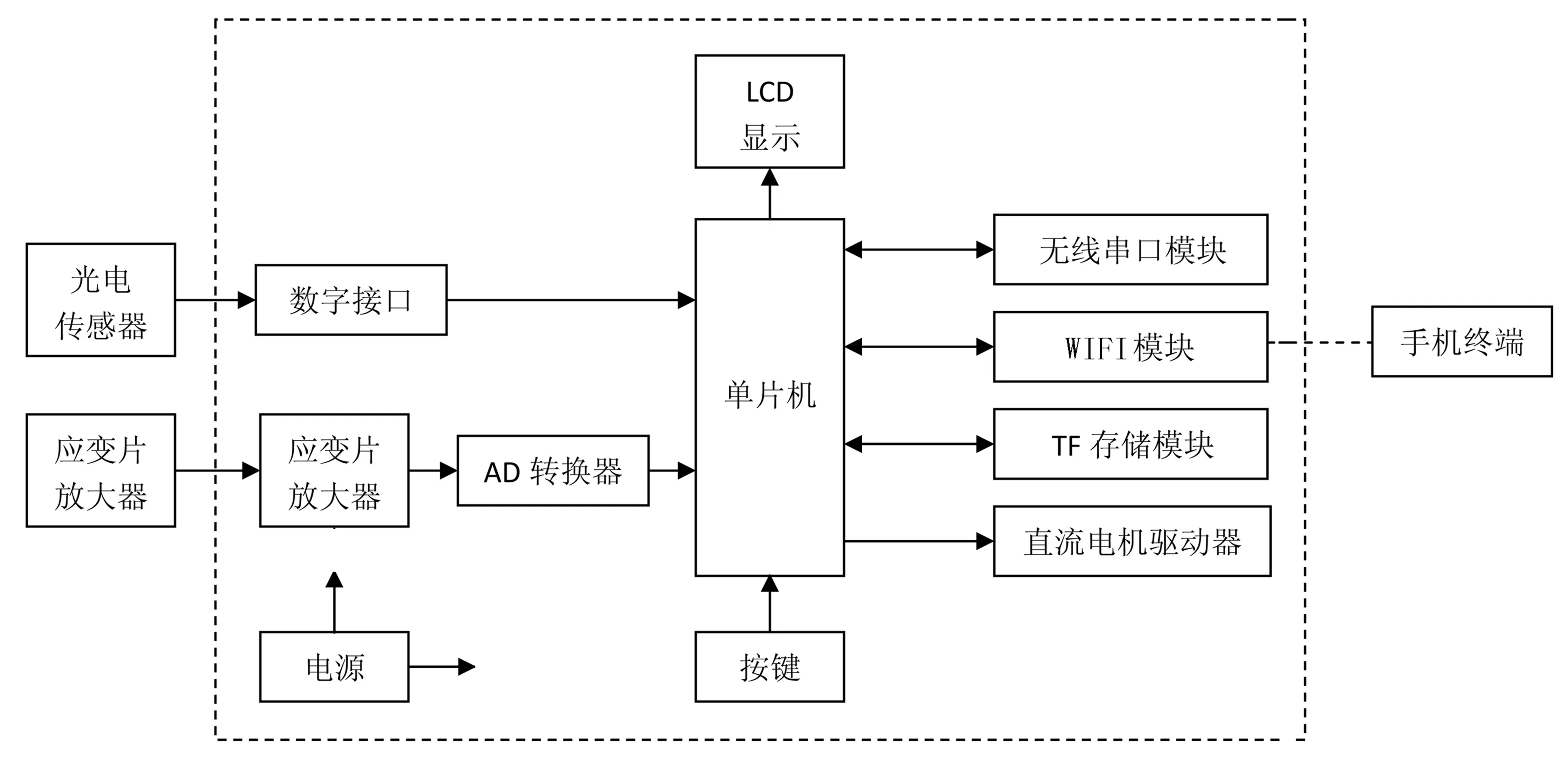
图2 土壤比贯入阻力测试装置系统框图
2 基于Android手机控制系统
本装置的手机控制系统是基于Java语言在Android Studio开发环境下完成[18-19]。
2.1 手机端系统流程
手机端与装置端采用WIFI点对点连接,手机端调用ServerSocket类中的accept()方法等待装置端的连接请求,手机向单片机发出SYN请求并进入SYN_ACK,并进入SYN_RCV状态,手机端确认后回复ACK,进入ESTABLISHED状态,单片机收到ACK后进入ESTABLISHED状态,这样基于TCP协议的连接建立成功;之后,程序等待手机端操作,当有检测到操作后,手机向测控装置发出相应控制命令,启动测控装置进行测量流程,测控装置端将测量数据反回给手机端,手机端获取数据经计算处理显示于手机端测控界面,并将数据以TXT格式存储到文件中。手机端程序流程图如图3所示。
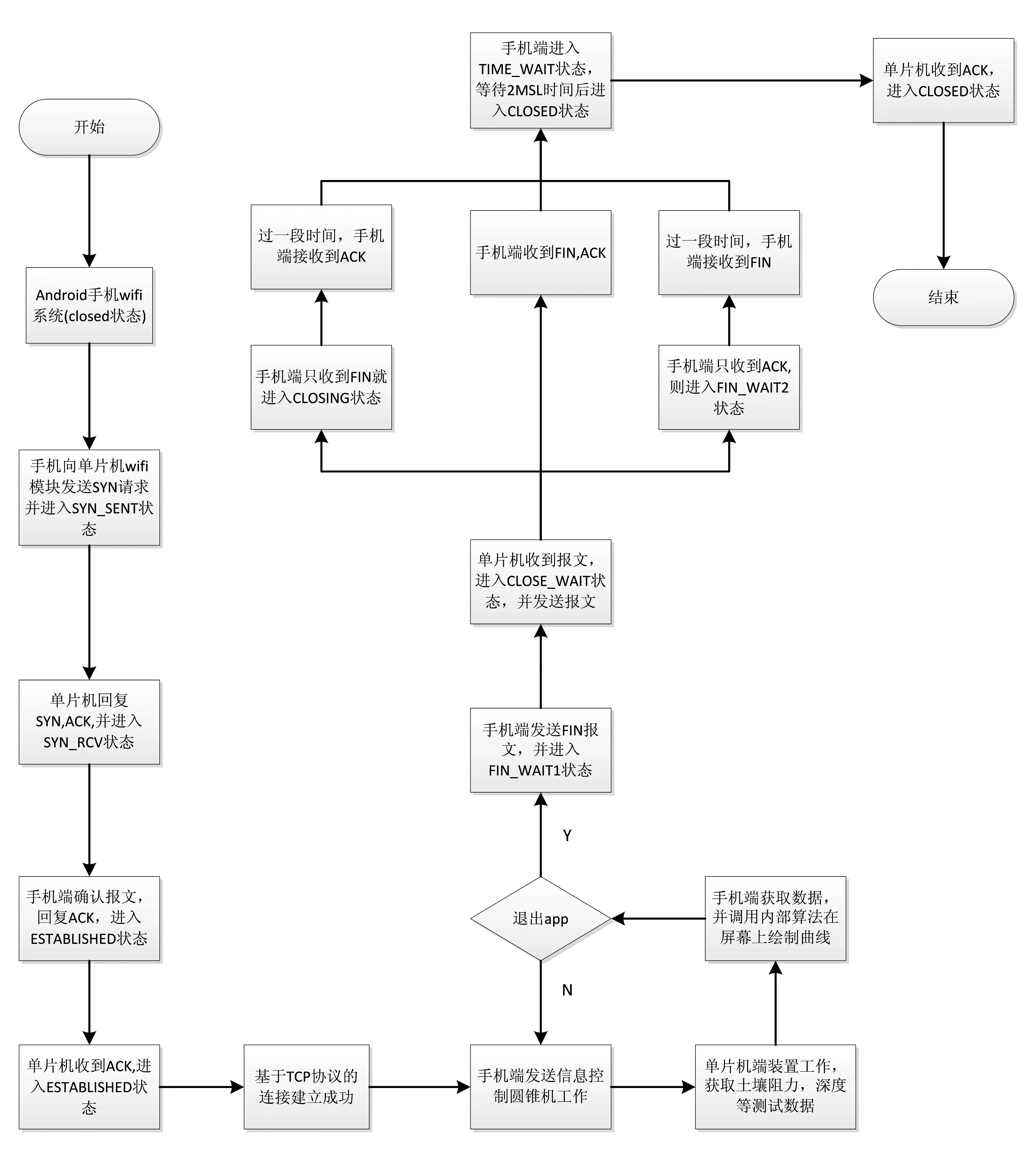
图3 手机端程序流程图
2.2 手机操作界面的设定
为实现手机端操控装置的启动、停止,圆锥测杆的上升、下降,可在装置运行过程中通过手机客户端利用APP界面的按钮存储数据,绘制阻力与深度关系图等功能,进行相应手机操作界面的设定。手机APP界面主要由显示界面和操作界面组成[20]:显示界面分为图像绘制和实时数据显示,图像绘制区的横纵坐标范围可根据测量数据进行自动调整;实时数据显示区会显示当前状态下的比贯入阻力和深度大小。操作界面由4个主要button构成,分别控制着测量装置的运行、停止、复位,以及数据存储。整体效果如图4所示。

图4 手机APP界面显示图
初始图像框架绘制程序模块如下:
protected void initRenderer() {
mRenderer.setApplyBackgroundColor(true);
mRenderer.setBackgroundColor(Color.CYAN);
mRenderer.setMarginsColor(Color.argb(00, 11, 11, 11));
mRenderer.setAxesColor(Color.BLUE);
if (1 == li) {
mRenderer.setChartTitle("力与深度图");
mRenderer.setXTitle("力");
mRenderer.setYTitle("深度");
}
else {
mRenderer.setChartTitle("深度压强图");
mRenderer.setXTitle("深度");
mRenderer.setYTitle("比贯入阻力");
}
mRenderer.setChartTitleTextSize(40);
mRenderer.setAxisTitleTextSize(30);
mRenderer.setInScroll(true);
mRenderer.setLabelsColor(Color.BLUE);
mRenderer.setLabelsTextSize(30);
mRenderer.setLegendTextSize(30);
mRenderer.setShowLegend(false);
mRenderer.setMargins(new int[]{30, 50, 20, 50});
mRenderer.setPanEnabled(true);
mRenderer.setZoomEnabled(true);
mRenderer.setZoomButtonsVisible(true);
mRenderer.setPointSize(0);
mRenderer.setYLabelsPadding(5);
mRenderer.setYLabelsColor(0,Color.BLUE);
mRenderer.setXLabelsColor(Color.BLUE);
mRenderer.setXLabelsPadding(5);
mRenderer.setXLabelsAngle(10);
XYSeriesRenderer renderer = new XYSeriesRenderer();
mRenderer.addSeriesRenderer(renderer);
renderer.setPointStyle(PointStyle.CIRCLE);
renderer.setFillPoints(true);
renderer.setDisplayChartValues(false);
renderer.setDisplayChartValuesDistance(10);
renderer.setLineWidth(10);
mRenderer.setClickEnabled(true);
mRenderer.setSelectableBuffer(10);
}
2.3 系统整体调试
WIFI控制土壤贯入阻力测试装置最终实现的功能:可通过Android手机客户端[21-22]操作界面实现装置的启动、停止,圆锥测杆的上升、下降等功能;可在装置运行过程中通过手机客户端利用APP界面的按钮存储数据,绘制阻力与深度关系图。主要调试内容如下:
1)WIFI通信测试。用APP按键控制装置启动停止,装置可以完成相应指令,证明通信系统没有问题,装置均正常工作,然后测试存储数据绘制图像等功能。Android手机客户端界面如图5所示。
2)装置基本功能测试。当测试装置收到手机APP发送的启动停止指令后,单片机会接收信号并控制推杆电机做出相应动作。
3 应用测试
利用该测试装置进行土壤比贯入阻力测量实验。初步应用表明:该仪器结构合理,操作简便;测量过程中,单片机直接控制显示、测量及数据存储;手机端操作无误,数据传输、显示与图像绘制正确。
4 结论
应用传感器技术、机械电子技术、无线通信技术和智能终端设备,研制了一种土壤比贯入阻力测量装置。该装置以单片机为核心采用电机驱动,通过WIFI连接初步实现了使用Android手机操控测量装置,接收、存储测量数据和绘制曲线功能。应用表明:该装置自动化程度高,使用方便,测量准确,省时省力,具有较好应用前景。

图5 Android手机客户端界面
[1] 张兴义,隋跃宇.土壤压实对农作物影响概述[J].农 业 机 械 学 报,2005,36(10):161-164.
[2] 林振江,崔立勇,王 闯,等.农 田 土 壤 机 械 压 实 的 发 生 、影 响 及 改 良[J].农机化研究,2011,33(11)249-252.
[3] 冯竞祥,赵新,马健军.土壤机械阻力测定研究进展[J].农 业 工 程,2013(2):1-4.
[4] 赵振家,邹猛,薛龙,等.压实对土壤应力分布的影响仿真分析[J].农 业 机 械 学 报,2012,43(增刊)311-313,338.
[5] 夏拥军,丁为民.土壤机械阻力的测定及其应用[J].农机化研究,2006(10)190-192,196.
[6] 于艳,龚丽农,尚书旗.农机土槽试验动力学参数测试系统的研制[J].农 业 工 程学报,2011,27(S1):323-328.
[7] 李雷霞,贾晶霞,李建东,等.土壤参数与马铃薯收获机牵引阻力的研究[J].农机化研究,2013,35(10)125-128.
[8] 邓伟刚,王春光,王洪波.马铃薯收获机挖掘铲工作阻力影响因素分析与研究[J].农机化研究,2016,38(9)53-58.
[9] Carter L M.Portable recording penetrometer measures soil strength profiles[J].Agriculture Engineering,1967,46(6):348-349.
[10] Liu W Upadhyaya S K,Kataoka T et al.Development of atexture/soil compaction sensor[C]//Proccedings of the 3ndinternational confercnce in precision agriculture.Minncapolis,1996:617-630.
[11] Koostra B K.Stombaugh T S.Deveiopment and Evaluation of a sensor to continuously measure air permeability of soil[C]//ASAE paper No 03-1072,2003.
[12] Wels L G,Shear S A,Fulton J P, et al.Assessment of remote sensing for implementation of precision tillage[C]//ASAE PAPER No 00-1084,2000.
[13] 赵新,罗锡文,L.G.Wells.土壤阻力连续测试设备研制[J].农业工程学报,2009,25(2)68-71.
[14] 赵新,罗锡文,L.G.Wells.土壤阻力连续测试系统农田试验研究[J].农机化研究,2012,34(8):111-115.
[15] 甄文斌,杨丹彤,黄世醒,等.土壤耕作阻力测试系统研制及标定[J].农机化研究,2011,33(7)104-107.
[16] 李艳洁,林剑辉,徐泳.圆锥指数仪贯入沙土试验的离散元法模拟J].农 业 机 械 学 报,2011,42(11)44-48.
[17] 林剑辉,孙宇瑞,马道坤,等。土壤圆锥指数及其测量技术研究进展[J].湖南农业科学,2011(13)155-159.
[18] 陈甫. Andriod studio应用[J].电脑知识与技术,2014,10(24):5659-5661,5669.
[19] 雷擎,伊凡.基于Andriod平台的移动互联网开发[M].北京:清华大学出版社,2014.
[20] 尹孟征.基于Andriod的APP开发平台综述[J].通信电源技术,2016,33(4):154-155,213.
[21] 汤莉莉,黄伟. 基于Andriod手机蓝牙控制的智能小车设计[J].现代电子技术,2016,39(12):132-134.
[22] 郭志宏. Andriod应用开发详解[M].北京:电子工业出版社,2010.Abstract ID:1003-188X(2017)07-0143-EA
Research on the WIFI Control Soil Penetration Resistance Testing Device —Based on the Android Mobile Phone
Ren Guoqiang, Liu Zhenye,Li Yide,Zhang Baopeng,Liu Dongmei, Liu Liyi
(College of Engineering, Northeast Agricultural University, Harbin 150030,China)
Soil specific penetration resistance is an important indicator of the study of soil compaction degree. Existing products most use the manual measuring device.Manual operation can't keep constant speed and have low degree of intelligence, low precision, high labor intensity and low artificial measuring efficiency. For this purpose, use sensor technology,mechanical and electrical technology,Wireless communication technology and Intelligent terminal equipment.The corresponding design was developed based on the Android WiFi control of electrodynamic soil penetration resistance tester. Single chip microcomputer is the core of the device. The device driven by the motor let cone probe penetrate into the soil as the constant speed of 30.48 mm/s(the standard of ASAE S313.3 FEB04),realize the real-time measurement and data storage in the measuring device. Using Android phones with WIFI communications, the preliminary design realizes establishing connection with measuring device, controlling measurement device,receiving saving measurement data and drawing curve. Test results indicate that the device has simple structure, high precision measurement, simple operation, a high degree of automation and a wide application prospect.
specific penetration resistance;soil; resistance test; android mobile phone; WIFI
2016-09-01
公益性行业(农业)科研专项( 201503119-06);全国大学生科技创新项目(2015-2016)
任国强(1996-),男,哈尔滨人,本科生,(E-mail)786136386@qq.com。
刘立意(1963 -),男,哈尔滨人,研究员级高级工程师,(E-mail)lyliu2468@163.com。
S24; S152
A
1003-188X(2017)07-0143-05
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
昆明医科大学学报(2021年12期)2021-12-30
中等数学(2021年6期)2021-08-14
小学生学习指导(高年级)(2021年6期)2021-06-19
哈尔滨轴承(2021年4期)2021-03-08
中国船检(2020年11期)2020-11-27
英语文摘(2020年10期)2020-11-26
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
