
四轮转向液压底盘自动驾驶系统设计
2017-12-16 09:15范晓冬魏新华
农机化研究 2017年5期
范晓冬,魏新华
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
四轮转向液压底盘自动驾驶系统设计
范晓冬,魏新华
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
针对“精准农业”的作业需求,为提高植保机械的作业精度,降低驾驶人员的工作强度,设计了一种四轮转向液压底盘自动驾驶系统。该系统主要由车载电脑、行车控制器、RTK-DGPS采集装置、电控液压转向装置及行车状态采集装置等组成。行车状态采集装置采集行车参数信息并基于iCAN通信协议进行系统通信。车载电脑根据导航控制模型和各传感器实时参数生成控制指令,行车控制器根据车载电脑指令根据四轮车运动模型生成电控信号,并通过各电磁阀控制液压马达和转向油缸实现对底盘4个轮的转向。试验结果表明:当底盘前进速度为2m/s时,平均跟踪误差不超过0.04m。
四轮转向;液压系统;CAN总线;RTK-DGPS;自动驾驶
0 引言
农业机械智能化、自动化是“精准农业”的发展方向。农用拖拉机自动驾驶技术的应用可大大减轻驾驶人员的劳动负荷,有效避免作业过程中衔接行产生的遗漏和重叠现象,提高了作业精度和作业效率[1-2]。
近年来,国内外学者在自动导航驾驶方面进行了深入研究。德国Hohenheim[3]大学在饲料收割机上开发了一套自动驾驶系统,采用天宝7400型RTK-GPS定位,以简化三轮车模型为基础设计了转向控制器,实现自动转向驾驶。罗锡文等[4]基于 RTK-DGPS在东方红 X-804 拖拉机上开发了一套自动导航控制系统,建立了拖拉机直线跟踪的导航控制传递函数模型。其中,转向轮偏角检测传感器和电控液压转向装置构成转向轮偏角的闭环控制回路,该回路可根据导航控制器提供的期望转向轮偏角实现偏转角的随动控制。周建军等[5]在四轮电动车上开发一套自动驾驶系统,采用模糊控制算法进行转向控制,基于CAN总线通信,由脉冲信号控制步进电机实现电动车的转向控制。
当前,自动导航自动驾驶技术已比较成熟,如拓普康System150自动驾驶系统、合众思壮公司推出的Hemisphere“壁虎”农机自动驾驶系统及中海达公司推出的基于北斗导航的农用拖拉机自动导航驾驶系统。但以上系统大多针对的是两轮驱动两轮转向的农用机械。四轮驱动四轮转向底盘相较于两轮转向底盘通过性强、转向半径小、操作灵活,但对四轮驱动四轮转向底盘自动驾驶系统未的研究报道较少。因此,本文在国内现有研究的基础上,设计了一套四轮转向的液压底盘自动驾驶系统[5-8]。
1 系统整体结构
自动驾驶底盘主要包括动力系统、制动系统、转向控制系统及自动驾驶控制系统等,如图1所示。动力系统主要包括液压马达和减速机。该底盘为四轮驱动,故每个车轮都配有一个插入式液压马达。转向控制系统由机械转向装置和转向油缸组成。由转向油缸的伸缩变化带动转向摇臂,使车轮围绕转向节轴线旋转, 实现四轮独立转向。

图1 底盘总体布置示意图
自动驾驶电控系统主要由车载电脑、RTK-DGPS信号接收单元、底盘姿态信息采集单元(四轮转向角、横摆角速度等)、底盘瞬时速度采集单元、行车控制单元及转向控制单元等组成,如图2所示。各模块单元通过CAN总线进行连接,形成分布式控制系统。车载电脑预装有WinCE5.0和嵌入式GIS系统(北京超图软件Supermap5.0),RTK-DGPS采集底盘实时位置信息,并通过RS-232接口将信息传输给车载电脑,车载电脑通过GIS系统将当前位置信息和规划行车路径进行比较,并由导航控制模型计算车轮的期望转角,将该期望转角和角度传感器测得的转向轮实际偏角输入到行车控制器内;行车控制器根据运动学模型计算转向控制量,进而控制液压元件,使其按期望的转角进行转动,从而实现自动驾驶。

图2 自动驾驶控制系统总体设计框图
1.1 RTK-DGPS信号接收单元
为满足“精准农业”的作业精度需求,本系统采用天宝公司5700型 GPS 接收机系统,其支持RTK-DGPS 定位,水平定位精度误差为固定误差1cm加每公里动态误差1mm,垂直定位精度误差为固定误差2cm加每公里动态误差1mm,动态延迟小于20ms。
1.2 速度采集单元
由于是四轮驱动转向底盘,所以需检测所有车轮转速,在每个车轮上均匀布置磁钢,霍尔传感器分别固定在底盘机架上。当车轮转过一个磁钢时,就会输出一个脉冲信号,iCAN-7202模块可检测脉冲信号,并由CAN总线接口传输到车载电脑中,可得底盘车轮瞬时前进速度为
(1)
式中vi—所测车轮瞬时线速度(m/s);
d—所测车轮的直径(m);
f—脉冲频率(Hz);
n—每个车轮上磁钢数;
δ—检测车轮的滑转率(%)。
底盘设计行驶速度不大于7.5 km/h,且采用四轮驱动、四轮转向,主要在低速区行驶,可用2个iCAN-7202测频模块采集4个车轮瞬时线速度,将采集的4个车轮的平均线速度作为车辆行驶速度V,则有
(2)
其中,vi为各车轮瞬时转速。
1.3 行车控制器及信号采集单元
行车控制器需运行农机运动学模型,输出液压转向电流控制参数,需有较强的计算能力并具备CAN总线接口。因此,采用DSP56F805芯片,该芯片融合微控制器和DSP的点,具有较快的运算能力,并配置8路12位精度的A/D转换模块,支持CAN2.0B协议。
iCAN-4017模块具有8路模拟量输入通道,模拟量信号的分辨率为16位[9],用于采集车轮转角信息。
iCAN-7202模块具有2路正脉冲计数器,最大检测脉冲频率为100kHz,用于采集霍尔传感器的脉冲信号。
iCAN-4400模块具有4路模拟量输出通道,可输出电压或者电流信号,用于输出各比例电磁阀的控制信号。
底盘实时参数采集和行车控制程序基于微软公司的Embedded visual C++4.0软件开发平台进行开发。
2 液压转向控制系统
液压转向控制系统主要由定量齿轮泵、电液比例换向阀和转向油缸组成,如图3所示。由定量齿轮泵经过滤器对转向油缸供油,定差溢流阀的作用是调节泵出口压力与负载压力相匹配。行车控制器通过iCAN-4400输出模拟量控制信号给4路电液比例换向阀,换向阀动作,使得控制车轮的转向油缸行程改变,推动转向摇臂,实现车轮围绕转向轴转动,进行转向。
3 行车控制模型
3.1 四轮转向二自由度力学模型
传统的2WS汽车只有前轮作主动转向动作,后轮只作随动运动,使汽车的转弯半径较大,转向不灵活。在田间作业时,作业环境复杂,较大的转弯半径可能造成作业过程中的遗漏和重叠现象。四轮转向的目的在于使汽车低速转向行驶时前后轮作逆向偏转,可减小汽车的转弯半径,获得良好的机动性。本文涉及的底盘主要在田间作业,设计最高行驶速度为7.5km/h,在低速区工作,因此在田间作业时采用四轮转向系统,可有效增加机组作业稳定性,减小转弯半径。
由于本文的控制对象是4WS移动底盘,以二自由度的4WS动力学模型作为研究基础,该模型虽经过简化,但经证实可以反映4WS汽车的基本运动特性[10]。
该模型如图4所示。

1.定量齿轮泵 2.过滤器 3.电磁球阀紧急泄荷 4.定差溢流阀 5.安全阀 6.三通减压阀 7.转向油缸1 8.转向油缸2 9.转向油缸3 10.转向油缸4 11.电液比例换向阀1 12.电液比例换向阀2 13.电液比例换向阀3 14.电液比例换向阀4

图4 拖拉机二自由度四轮转向模型
其由侧向运动与横摆运动方程构成,其动力学方程为[11]
k1δ1+k2δ2
(3)
lfk1δ1+lrk2δ2
(4)
式中k1—前轮轮胎刚度;
k2—后轮轮胎刚度;
u—纵向车速;
Iz—车身横摆惯量;
lf—质心到前轴距离;
lr—质心到后轴距离;
ωr—横摆角速度;
δ1—前轮转角;
δ2—后轮转角;
v—车身侧向速度。
本文涉及的底盘,作业速度不超过7.5km/s,因此控制系统可采用前轮转角比例前馈的控制方法:令δ2=kδ1[12],在低速时,k值应为负(前后轮偏转方向相反)、有效减小了转弯半径,提高了操作灵活性。
(5)
由式(5)可知:为使农机在转向时可以保持质心侧偏角为0,k要跟随u变化,采用前轮转角比例前馈的控制方法,车辆质心侧偏角为0,则有u=V(汽车实时车速)。
3.2 基于预瞄点的导航追踪模型
在自动驾驶时,导航系统在拟合好的曲线上按一定步长选取节点,作为行驶的预描点[13]。直线行驶时,为了保持较稳定的行驶状态,要求两相邻预瞄点之间的距离不能太小;在转向行驶时,无人车以低速行驶确保安全性,相对于直行行驶需要更多预瞄点指引,要求两相邻预瞄点之间的距离不能太大。从节点中筛选出在导航中更有实用价值的转向点,进而简化直线道路的预瞄点,为后期的导航提供便捷。
假定筛选出的第n个转向点用Pn表示,令无人车初始位置为第一个转向点即P1,判定节点ai是否为转向点的具体步骤如下:
1)前一转向点Pn、当前节点ai和下一节点ai+1,依次构成向量Ai、Ai+1,并求两向量夹角Φ;
2)比较Φ与预先设定阈值角度β的大小,若满足条件Φ≤β,则ai不是转向点;若Φ>β,则ai为转向点Pn+1;
3)重复步骤 1)~2)依次判定各个节点是否为转向点。
图5举例说明了转向点筛选方法。由P1、a1、a2依次组成的两向量夹角很小,不满足转向点条件,a1不是转向点。接着,计算由a1、a2、a3构成两向量的夹角Φ,结果Φ大于设定阈值角度β,a2为转向点P2。P2、a3、a4组成的两向量夹角满足转向点条件,a3为转向点。
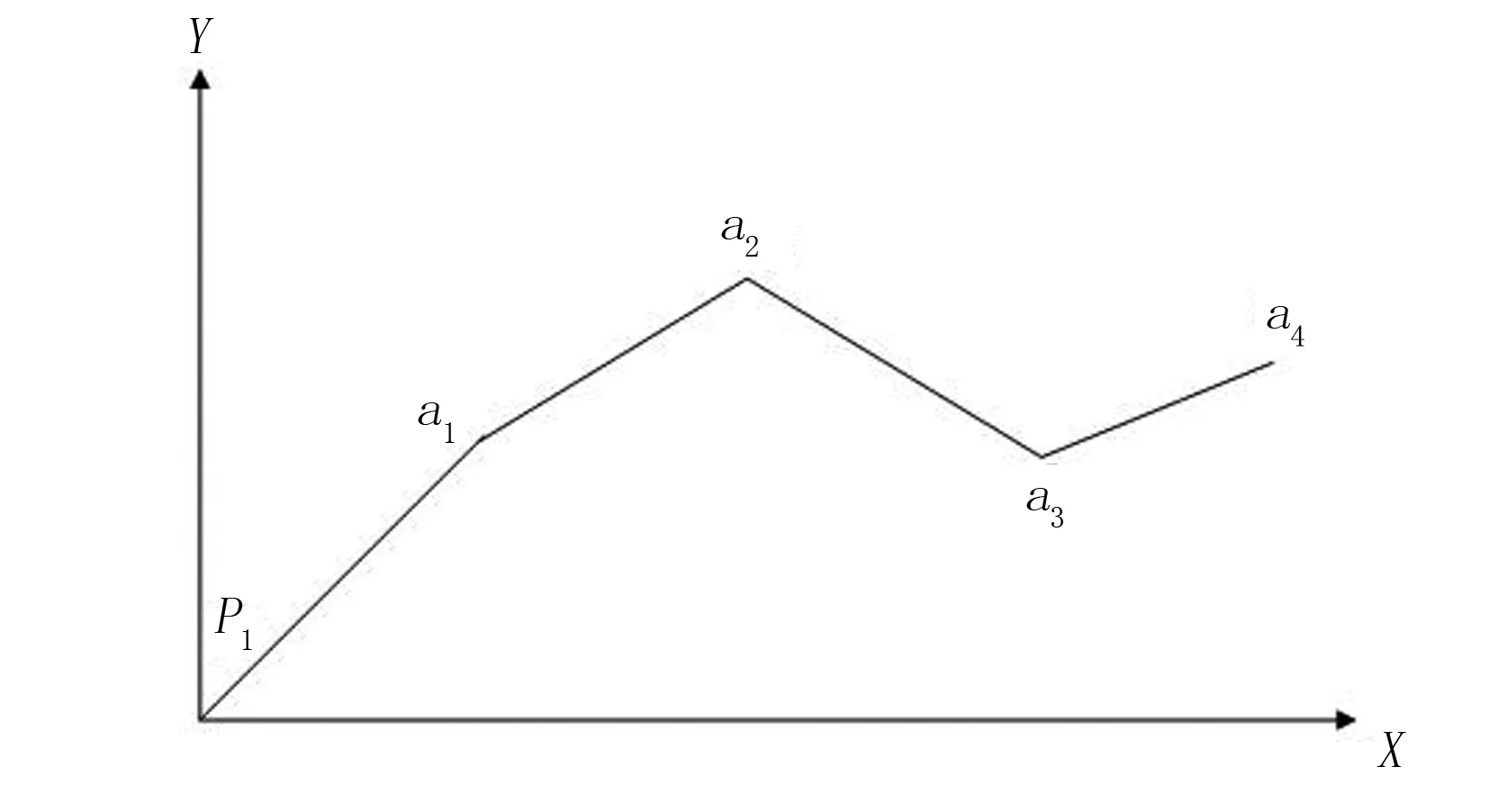
图5 转向节点筛选示意图
3.2.1 直线导航
在当地水平坐标系中直线导航涉及无人车实时坐标点、上一时刻坐标点和预瞄点,假设无人车某一时刻坐标点(X,Y)位于已知上一时刻节点(X1,Y1)和预瞄点(X2,Y2)之间,如图 6所示。Ψ代表理想行驶轨迹(X1,Y1)→(X2,Y2)与X轴正向夹角;β代表实际行驶轨迹(X1,Y1)→(X,Y)与X轴正向夹角;θ代表(X1,Y1)→(X,Y) 与X轴正向夹角;L代表无人车当前点(X,Y)到预瞄点(X2,Y2)的距离。
由图6可知
(6)
(7)
各参数确定后可求得以下所需变量,车辆航向与期望行驶轨迹夹角为
ε=θ-β
(8)
无人车当前点到预瞄点的距离L为
(9)
变量L作为选择下一预瞄点的依据,随着无人车的行驶,无人车距当前预瞄点的距离L逐渐变小,当L小于一定值 d(预定的判断阈值),即L 图6 直线导航原理图 3.2.2 转向导航 直线上行驶的无人车到达转向点附近,当两者距离小于d,进入转向导航模式,已知转向点(X1,Y1)、下一节点 (X2,Y2)、无人车某一时刻的坐标点(X,Y)和无人车上一时刻节点(X0,Y0),如图 7 所示。 图7 转向导航原理图 θ代表无人车当前的航向角,则有 (10) 无人车实际期望转向角ε计算公式为 (11) 无人车当前点到转向点的距离L为 (12) 变量L作为转向导航模式的依据,随着无人车的行驶,无人车距转向点的距离L逐渐变小;当L小于一定值d,即L 本文涉及的底盘:m=3 000kg,Lf=1.5m,Lr=1.4m,k1=4 800N/rad,k2=4 400N/rad,Iz=2 000kg· m2。 导航控制方法如图8所示。车载电脑基于预瞄追踪导航模型通过嵌入式GIS系统(Supermap5.0)解译规划路径和接收的DGPS位置信息行比较,得出车辆期望转角。由期望转角ε与前轮当前转角的差值,得出前轮实际控制转角δ1;并通过CAN总线传输到行车控制器,行车控制器由霍尔传感器测得车速V,根据四轮转向比例前馈控制方法,得出后轮控制转角δ2;由行车控制器发出控制指令,控制电磁阀动作,进而控制车轮的转向油缸进行伸缩变化,实现自动转向。 图8 导航控制示意图 本系统将RTK-DGPS信息通过RS-232接口传输到车载电脑,再将各传感器采集的信息以iCAN报文的形式通过CAN总线传输到车载电脑;车载电脑根据导航控制模型和规划路径进行比较,生成行车控制指令,以iCAN报文形式传输给行车控制器;通过行车控制器分别对4个车轮的液压系统进行控制,实现对液压底盘的自动驾驶控制。 将设计的自动驾驶控制系统进行路径跟踪试验。试验安排在江苏大学农装大院内进行,在2m/s车速条件下,直线跟踪的最大横向偏差为13cm,平均误差为3.8cm,如图9所示。 图9 直线跟踪结果 测试结果表明:本驾驶系统可在柏油路面沿规划路径行驶,可以将其推广并在田间进行试验。 本文设计了四轮转向液压底盘自动驾驶系统。该系统由RTK-DGPS采集底盘实时位置信息,由 RS-232接口传输到车载电脑,车载电脑将当前位置信息和规划路径进行比较,并由基于预瞄点的导航算法计算出车轮的期望偏角;将该期望偏角和车轮当前偏转角由CAN总线传输到行车控制内,并根据四轮转向二自由度力学模型计算出合适的偏转控制量控制液压元件,实现对车轮转角的控制。测试结果表明:在底盘前进速度为2m/s时,平均跟踪误差不超过0.04m。 [1] Toru Torii. Research in autonomous agriculture vehicles in Japan[J].Computers and Electronics in Agriculture,2000,25: 133 -153. [2] Reid J F, Zhang Q, Noguchi N, et al. Agricultural automatic guidance research in North America[J].Computers and Electronics in Agriculture, 2000, 25(1/2): 155-167. [3] CHO SJ,KINH. Autonomous speed sprayer guidance using machine vision and fuzzy logic[J].ASAE 1999(4) 1137-1143. [4] 罗锡文, 张智刚. 东方红 X-804 拖拉机的 DGPS 自动导航控制系统 [J].农业工程学报,2009,11(25):139-145. [5] 周建军,张漫,汪懋华.基于模糊控制的农用车辆路线跟踪[J].农业机械学报,2009,40(4):152-156. [6] 聂海强,张陌阳,李正仁.国内水田机械研究现状[J].现代化农业,2011(1):7-9. [7] 侯占峰,鲁植雄. CAN总线技术在拖拉机上的应用展望[J].农机化研究, 2006(10): 184 -186. [8] 吴锋,孙俊,冯安. CAN总线在拖拉机检测线中的应用设计[J].农业工程学报, 2005, 21(6): 74 -76. [9] 周立功,等. iCAN现场总线原理与应用[M].北京:北京航空航天大学出版社,2007. [10] Sano S, Furukawa Y, Shlralshis. Four Wheel Steering System with Rear Wheel Steer Angle Controlled as a Function of Steering Wheel Angle[C]//SAE Paper, 1986:860-625. [11] 喻凡,林逸. 汽车系统动力学[M].北京:机械工业出版社,2005. [12] 《汽车工程手册》编辑委员会.《汽车工程手册》设计篇[K].北京:人民交通出版社,2001. [13] Zhen jia Arjunal Balasuriya,Subhash Challa.Autonomous Vehicles Navigation with Visual Target Tracking:Technical Approaches [J].Algorithms, 2008,1 (2):153. Design of Four Wheel Steering Hydraulic Chassis Automatic Driving System Fan Xiaodong, Wei Xinhua (Key Laboratory of Modern Agricultural Equipment and Technology, Jiangsu University, Zhenjiang 212013,China) According to the operation requirement of "precision agriculture", in order to improve the accuracy of the plant protection machinery operation, reduce the work intensity of drivers, this paper designs a kind of four wheel steering hydraulic chassis automatic driving system. This system mainly includes the vehicle computer, the driving controller, the RTK-DGPS collection device, the electric control hydraulic steering device, the driving state collection equipment and so on. The driving state acquisition device collects the driving parameter information and communicates with the vehicle computer based on the iCAN communication protocol . The on-board computer according to the navigation control model of each sensor and real-time parameters to generate a control command, the driving controller according to the instructions of the on-board computer according to four wheel vehicle motion model to generate control signals and through the electromagnetic valve control hydraulic motor and steering oil cylinder on the chassis of a four wheel steering control. Test results showed that: when forward speed is 2 m/s, the average tracking error is no more than 0.04m. four-wheel steering; hydraulic system; CAN-bus;RTK-DGPS; auto matic driving 2016-04-14 国家“863计划”项目 (2013AA 102307);江苏省农业科技支撑计划重点项目(BE2013401 );江苏高校优势学科建设工程资助项目(苏政办[2014]37号) 范晓冬(1990-),男,南京人,硕士研究生,(E-mail) 1246172740@qq.com。 魏新华(1972-),男,山东滨州人,研究员, 博士,博士生导师,(E-mail)18361810295@163.com。 S219.032;S49 A 1003-188X(2017)05-0253-06



4 通信测试与导航试验

5 结论
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
解放军健康(2017年5期)2017-08-01
中国新技术新产品(2016年21期)2016-12-08
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年4期)2016-03-01
中国设备工程(2015年2期)2015-12-27
探测与控制学报(2015年4期)2015-12-15
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
