
基于改进人工势场的采摘仿生机械手设计和仿真研究
2017-12-16 09:15陈东凤
农机化研究 2017年5期
陈东凤
(重庆电子工程职业学院 应用电子学院,重庆 401331)
基于改进人工势场的采摘仿生机械手设计和仿真研究
陈东凤
(重庆电子工程职业学院 应用电子学院,重庆 401331)
提出了一种应用于水果采摘机器人末端执行器的仿生机械手,并设计了仿生机械手指关节微电机的协同控制虚拟总轴系统,提高了采摘机器人手指关节的灵活性,降低了水果采摘机器人采摘过程中对果实的损伤。针对传统的电机人工势场控制器难以满足由负载扰动引起的多电机实时的同步运转,提出了具有相邻吸引力的人工势场多电机同步控制方法,通过相邻电机的相互作用,使各个电机协同工作,降低了负载扰动对于机械仿生手指动作不协调的干扰。对采摘机械仿生手各手指关节电机的跟随协同性进行了测试,结果表明:采用改进后的人工势场模型后,可以有效地改善跟随手指的角度误差,响应效率高,在更短的时间内可以将误差降低到最低。对采摘过程手指的协同性进行了虚拟仿真研究,结果表明:改进后人工势场控制模型三手指角速度的数值差异较小,三手指的协同性较好,可以满足协同控制的设计要求。
采摘机械手;人工势场;仿生机械;虚拟仿真;协同控制
0 引言
近年来,关于多电机同步控制的研究受到越来越多的关注,多电机同步控制已广泛用于工业生产领域,不仅解决了诸多工程中的实际问题,而且获得了很大的经济效益。采摘机器人机械仿生手的手指关节采用微电机进行控制,属于多电机协同工作的系统,是一个多变量、非线性的模型,因此对于控制系统的设计要求更高。人工势场法是由Khatib提出的一种虚拟力法,其基本思想是将机器人作业的环境抽象为引力和斥力构建的场,目标会对机器人产生引力作用,而障碍物会对机器人产生斥力作用,最后利用合力来控制机器人的移动路径。将人工势场进行改进后,应用到仿生机械手关节多电机的控制系统中,对手指的协同控制研究具有重要的意义。
1 采摘仿真机械手指结构原理
在水果的采摘过程中,机械手指在对水果抓取过程中很容易造成水果的伤害,为了降低机械手对采摘果实的伤害,提高采摘机械手指的灵活性,需要设计一种类似人类手指的仿生机械手。仿真机械手以人类手指为参考对象,需设计较为柔软的接触面;同真实人类手指一样,具有灵活的关节,关节采用开环控制。由于手指体积较小,因此需要采用微电机控制。以苹果采摘为例,手指抓取苹果过程如图1所示。

图1 手指把握苹果示意图
为了简化设计、节省成本,可以苹果的抓取为例,主要对3个手指进行重点设计。设计过程中,使3个手指在微电机的控制下,可以协同动作, 其整体设计效果如图2所示。

图2 仿生机械手结构示意图
采用微电机对仿真机械手的关节进行控制,并利用电子虚拟总轴来同时控制仿生机械手的手指关节电机。与同步运行的机械长轴类似,电子虚拟总轴中将信号通过总轴作用后,计算每台电机的输入信号;总轴协调后,使每个手指的关节电机跟随运动,从而间接地对整个电机控制系统进行了改善。电子虚拟总轴的结构如图3所示。
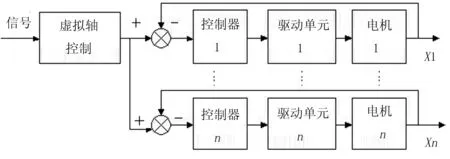
图3 电子虚拟总轴控制结构图
在电子虚拟总轴控制系统中,各个手指电机的控制回路是相对独立的,各个回路的关系为并行关系,由于各个电机之间没有耦合关系,因此控制较为简单易行。在这种控制方式下,各个手指关节控制电机不存在指令的时间差,若一个手指电机关节电机被扰动,可利用人工势场通过相邻电机进行补偿,最终实现电机的同步协调运转。
2 基于改进人工势场的机械手微电机协同控制算法
对于传统的人工势场而言,其考虑的仅仅是主电机和跟随电机的作用,而没有考虑相邻电机之间的关系。如果跟随电机中的某个电机转速不同于其他电机,相邻电机不能很好地保持协同性,会使电机的协同作用降低,影响多电机同步控制的效果。改进后的人工势场如图4所示。其考虑了相邻电机1和2之间的引力,可以使转速保持高度协同,从而使整个电机系统处于同步运转状态。

图4 改进后的多电机受力示意图
假设α表示相邻电机i和i+1的转角,Δα(αi,αi+1)=αi-αi+1表示转角差,Δαl表示转角差额定最大值。当Δα(αi,αi+1)=αi-αi+1<Δαl时,在电机上会差生引力场,相邻电机之间的引力势场为
Δα(αi,αi+1)<Δαl
(1)
其中,β表示正比例增益系数,对应的应力为
Fx(i,i+1)=β(αi,αi+1)
(2)
而改进后人工势场跟随电机i所受的合力为
Fh(i)=Fx(i)+Frep(i)+Fx(i,i+1)
(3)
其中,Frep(i)表示斥力。由此可见,改进后的人工势场的电机受力不仅包括引力和斥力,还包括相邻电机的作用力,其控制的耦合性更强, 因此在一个手指发出动作后,其他手指可以更好地追随该手指发出动作。把电机受到的合力作为主手指同步控制器的输入,可以使其他手指使其能够和其他跟随手指实现同步动作。本次研究以单个智能体为研究对象,根据电机中的电压和电矩平衡方程可以得
(4)
其中,U表示采摘机械手指驱动电机的两端电压;r表示回路中的总电阻;L表示电路绕组的电感;w表示直流电机的转速;i表示回路电流;E表示回路的感应电动势;c表示电压反馈系数;J表示转动惯量;k表示电磁力矩的系数;TL表示负载的转矩;T表示电机产生的电磁转矩。当x1=α、x2=w时,可以得到控制系统的状态方程为
(5)

Ui(t)=U1i(t)+U2i(t)
(6)
其中,跟随误差控制器的输出采用PID控制器进行控制,其表达式为
(7)
其中,e(t)表示期望的控制误差,通过控制其大小可以得到期望的输出值;kP、kI、kD分别表示比例、积分和微分控制系数。
3 采摘仿生机械手实验测试和虚拟仿真
为了验证改进人工势场对采摘仿真机械手关节微电机协同控制的效果,以茄子采摘为研究对象,设计了仿生机械手的实验测试,测试对象主要是跟随电机的跟随误差,如图5所示。

图5 仿真机械手指茄子实验
为了使仿生机械手完成采摘过程,首先将仿生机械手置于茄子的位置,然后给定主手指电机一个转向信号,从而可以得到手指作用时间随时间变化曲线,如图6所示。
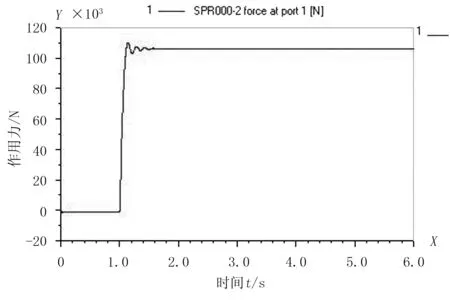
图6 作用力随时间变化曲线
在转向的作用下,手指和茄子进行接触,由于给定电机转向的信号属于阶跃信号,因此在起始阶段作用力为零;当接受到信号后,手指作用力随时间保持一个恒定值,通过测试得到了其他两个手指的角度跟随误差如图7所示。
采摘机械手误差测试的实验曲线表明:采用人工势场后可以有效地改善跟随手指的角度误差,并且响应迅速,在较短的采摘时间内可以将误差降低到最低。
如图8所示,为了进一步验证采摘仿生机械手微电机的协同控制效果,本研究采用MatLab/Simulink平台,对仿生机械手的微电机同步控制方案进行了仿真验证,其手指的虚拟网格模型如图9所示。

图7 采摘机械手手指误差测试曲线

图8 机械仿生手采摘模型

图9 虚拟仿真网格模型
利用手指的虚拟网格可以绘制出手指上任一点随时间变化曲线,在3个手指上分别取一点,便可以得3手指的协同控制曲线。通过仿真模拟计算,得到了在阶跃响应下,3个手指横向摆动的角速度曲线,如图10所示。

图10 改进前阶跃响应下横向摆动角速度仿真曲线
为了验证改进后人工势场对多微电机协同控制的效果,分别对改进前后阶跃响应下的手指摆动角速度曲线进行了仿真计算,如图11所示。由改进前的阶跃响应下手指摆动的角速度可以看出:改进前3手指角速度的数值差异较大,不能满足协同控制的设计要求。
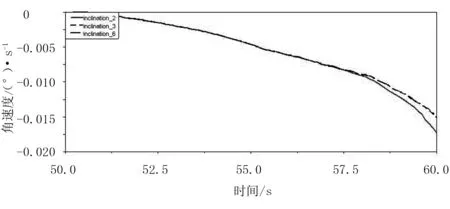
图11 改进后阶跃响应下横向摆动角速度仿真曲线
由改进后的阶跃响应下手指摆动的角速度可以看出:改进后3手指角速度的数值差异较小,3手指的协同性较好,可以满足协同控制的设计要求,从而验证了改进人工势场对多电机协同控制的可靠性。
4 结论
利用改进的人工势场模型,结合微机电技术和多关节微电机的协同控制虚拟总轴系统,对采摘机器人仿生机械手进行了优化设计,有效地提高了采摘机器人手指关节的灵活性,降低了不同手指负载扰动对整个机械手动作不协调的干扰。采用实验测试和虚拟仿真相结合的方法,对采摘机器人仿生机械手的性能进行了测试,结果表明:采用改进后的人工势场模型后,手指跟随运动的误差得到了明显的改善,而且提高了响应速度。仿真结果表明:采用改进后人工势场控制模型后,3手指的协同性较好,从而验证了改进后的人工势场在多电机协同控制中的作用,为采摘机器人仿生机械手的研究提供了重要借鉴。
[1] 张奇志,周亚丽.基于人工势场与细胞自动机的移动机器人呢路径规划算法[J].北京信息科技大学学报,2014,29(5): 8-13.
[2] 高溪钠,吴丽娟.多机器人编队的人工势场法控制[J].辽宁科技大学学报,2014,37(4):381-386.
[3] 赵海,刘倩,邵士亮,等.一种面向多智能体群集的避障算法[J].东北大学学报,2014, 35(3):347- 350.
[4] 曲成刚,曹喜滨,张泽旭.人工势场和虚拟领航者结合的多智能体编队[J].哈尔滨工业大学学报, 2014,46(5):1-5.
[5] 杨一波,王朝立.基于改进的人工势场法的机器人避障控制及其MATLAB实现[J].上海理工大学学报, 2013, 35(5): 496-500.
[6] 林志雄,张莉.基于神经模糊势场法的足球机器人路径规划[J].计算机仿真, 2014,31(1):416-420.
[7] 魏伊,薛彦卓.船舶自动避障仿真研究[J].大连海事大学学报,2013, 39(2):18-20.
[8] 王奎民,赵玉飞,侯恕萍, 等.一种改进人工势场的UUV动碍航物规避方法[J].智能系统学报, 2014,9(1): 47-52.
[9] 申舟,谢文俊,赵晓林, 等.基于人工势场的无人机战场威胁建模研究[J].计算机仿真,2014,31(2): 60-64.
[10] 王伟,王华.基于约束人工势场法的弹载飞行器实时避障航迹规划[J].航空动力学报,2014,29(7): 1738-1743.
[11] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[12] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[13] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013,35 (8):30-34.
[14] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[15] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014,34(7):1-7.
[16] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41 (7):368-370.
[17] 高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7): 25-33.
[18] 方莉娜,杨必胜.车载激光扫描数据的结构化道路自动提取方法[J].测绘报,2013,42(2):260-267.
[19] 熊爱武.基于车载激光云点数据的道路模型重建[J].地理信息世界,2013,20(6):86-88.
[20] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68.
[21] 张玲玲, 贾元华,曹瑾鑫.基于人工势场的交叉口车辆集聚模型[J].北京交通大学学报,2012,36(6): 117-121.
[22] 姬伟, 程风仪.基于改进人工势场的苹果采摘机器人机械手避障方法[J].农业机械学报,2013, 44(11): 253-259.
[23] 王建鑫,杨涛,李文.基于人工势场法的虚拟夹具建模技术研究[J].工业控制计算机,2013,26(9):103- 105.
[24] 裴文祥,唐敦兵,顾文斌,等. 基于人工势场的车间作业调度应用与研究[J].中国制造业信息化,2012,41(11):26-30.
[25] 李晓光,姚自强,杨旭.基于人工势场法的迷宫路径搜索算法设计[J].北京交通大学学报,2014,38(5): 27-31.
[26] 王佳. 基于人工势场方法的WSN传感覆盖率提高算法[J].传感技术学报,2012, 25(6):821-825.
[27] 张得涛,王少军,杨智利.转炉倾动系统电机同步控制研究[J].自动化技术与应用, 2013,32(8): 3-5.
[28] 郭叔增.现代印刷技术中的无轴传动系统[J].中国科技信息,2014(2):109-111.
[29] 曹玲芝,马跃军.基于偏差耦合的PMSM滑模变结构同步控制[J].微特电机,2012,40(9):56-59.
[30] 彭晓燕,刘威,张强.基于改进型偏差耦合结构的多电机同步控制[J].湖南大学学报,2013,40(11):77- 83.
Design and Simulation of Bionic Picking Manipulator Based on Improved Artificial Potential Field
Chen Dongfeng
(Institute of Applied Electronics, Chongqing College of Electronic Engineering, Chongqing 401331, China)
It presents an application to fruit picking robot execution for bionic manipulator, and designs bionic robot finger joints micro motor coordinated control, virtual shaft system, which improves the picking robot finger joint flexibility, reduces the fruit picking robot picking the damage to the fruit in the process. According to traditional motor artificial potential field controller, it is difficult to meet the load disturbance caused by multi motor real-time synchronous operation. The adjacent attraction is the artificial potential field of multi motor synchronous control method. Through the interaction of adjacent motor, each motor cooperative work and reduce the load disturbance for bionic robot finger in coordination of interference. The results show that the artificial potential field model can effectively improve the follow the finger angle error with high efficiency response, and it can be error can be reduced to a minimum in a shorter period. The picking process is with the help of finger coordination of research on virtual simulation. The simulation results show that the improved artificial potential field to control the numerical difference of the angular velocity of the model of three fingers is smaller, the three fingers are in good synergy, which can meet the requirements of the control collaborative design.
picking manipulator; artificial potential field; bionic machinery; virtual simulation; collaborative control
2016-03-03
重庆市教委科学技术一般项目(KJ51277192)
陈东凤(1974-),女,湖南邵阳人,讲师,(E-mail)cdfcq@sina.cn。
S126;TP24
A
1003-188X(2017)05-0231-05
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
汽车工程(2021年12期)2021-03-08
湖北汽车工业学院学报(2020年4期)2020-12-31
装备制造技术(2020年4期)2020-12-25
电子制作(2019年13期)2020-01-14
北京汽车(2019年4期)2019-09-17
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
制造技术与机床(2017年2期)2017-05-04
舰船科学技术(2015年8期)2015-02-27
