
基于超宽带技术的室内定位系统设计
2017-12-15 00:53,,
计算机测量与控制 2017年11期
,,
(1.广州工程技术职业学院,广州 510075; 2.华南理工大学 自动化科学与工程院,广州 510075)
基于超宽带技术的室内定位系统设计
陈伟森1,裴海龙2,夏睿灿2
(1.广州工程技术职业学院,广州510075; 2.华南理工大学自动化科学与工程院,广州510075)
为保障室内人员及物品安全,满足人们日常生活中对室内各个物品准确位置认知的需求,需要对室内定位系统进行设计;当前方法是利用红外线、超声波或射频识别技术对室内定位系统进行设计,系统中硬件设备昂贵,设备安装过程复杂,导致系统安装对环境要求太高,不适合应用于规模较大的室内,存在定位系统设计效率低、速度慢的问题;为此,提出一种基于超宽带技术的室内定位系统设计方法;该方法首先利用历史室内定位系统设计方法和当前室内定位系统设计需求,构建室内定位系统硬件,然后以该硬件为依据,采用模糊C均值法将室内物品特征空间信息数据,划分为若干个类,并将这若干个数据类别中数据点最多的类别留下,最后依据基于类匹配的室内粗定位和利用加权K近邻算法的室内精定位,完成对室内定位系统的设计;实验结果证明,所提方法可以准确地对室内定位系统进行设计,减少室内定位时间,提高定位效率,为该领域的研究发展提供有力依据。
超宽带技术;室内定位;系统设计
0 引言
随着社会科学和无线通信技术的不断发展,定位系统在交通、测绘、军事以及人们日常生活等各个方面得广泛的应用[1]。定位系统不仅可以对人们财物保护起到辅助作用,还在物品移动或者丢失寻找中存在极其重要的意义[2]。由于人类主要活动范围是在室内,因此室内定位系统设计受到社会各界的广泛关注和高度重视[3]。室内定位系统具有自动性、全天候性和高精度性等特点,大多数室内定位系统设计方法无法对其进行高精度、全面性的设计,导致室内定位系统在进行定位时,经常会出现定位误差大、定位时间长、室内物品丢失情况严重、定位准确率低等问题[4]。这种情况下,如何减少室内定位系统设计所用时间,提高定位精度,降低定位的误差,成为当前亟待解决的问题[5]。而基于超宽带技术的室内定位系统设计方法可以对室内定位系统,进行全方位、高精度地设计,是解决上述问题的可靠途径[6],正是因为室内定位系统设计对人们日常生活有着深远意义,因此成为目前该领域研究学者深度钻研的课题之一,同时也研究出很多优秀可靠的方法[7]。
文献[8]提出一种基于ZigBee技术的室内定位系统设计方法。该方法首先对目前的室内定位系统进行详细的分析,并对当前室内定位系统的优缺点进行总结,然后研究ZigBee网络拓扑结构和网络层协议对室内定位系统性能的影响,最后以上述条件为依据,提出室内定位系统的总设计方案,并对该方案进行实验测试,观察其整体效果。该方法下的室内定位系统运行效果较好,但是存在耗时较长的问题。文献[9]提出了一种基于Android平台的室内定位系统设计方法。该方法首先利用Android系统移动终端对WiFi信号的强度进行集成,然后采用Windows平台终端对位置指纹产生的数据库进行计算,依据移动的室内定位客户端与服务端之间的交互完成室内定位,当使用者有定位需求时,便向底层的WiFi模块发出请求,并将请求发送至服务器终端,最后服务器终端依据上述请求对室内物品的位置进行定位,且将定位信息返还至移动终端。该方法在进行室内定位系统设计时思路明确,但是存在定位准确率低的问题。文献[10]提出了一种基于RSSI的室内定位系统设计方法。该方法首先对室内定位系统设计中的关键技术进行研究,解析WiFi技术理论和WiFi室内定位方法,结合室内定位的影响因素,对室内定位系统的性能指标进行讨论,其次依据室内定位的特点,对利用传播模型的室内定位方法进行研究,并提出改进的定位系统设计方法,通过定位系统的实际需求,设计定位系统构架,对无线AP信号进行提取,建立接收信号强度的数据库,并依据该数据库设计室内定位系统,最后对该室内定位系统设计方法进行实验仿真。该方法下的室内定位系统定位准确率较高,但是方法操作起来比较复杂。
针对上述产生的问题,提出一种基于超宽带技术的室内定位系统设计方法。仿真实验证明,所提方法可以准确地对室内定位系统进行设计,可以应用于大规模的室内定位中。
1 基于超宽带技术的室内定位系统设计方法
1.1 室内定位系统结构
实现室内定位系统的设计,首先要对其硬件进行设计,图1是室内定位系统结构图。
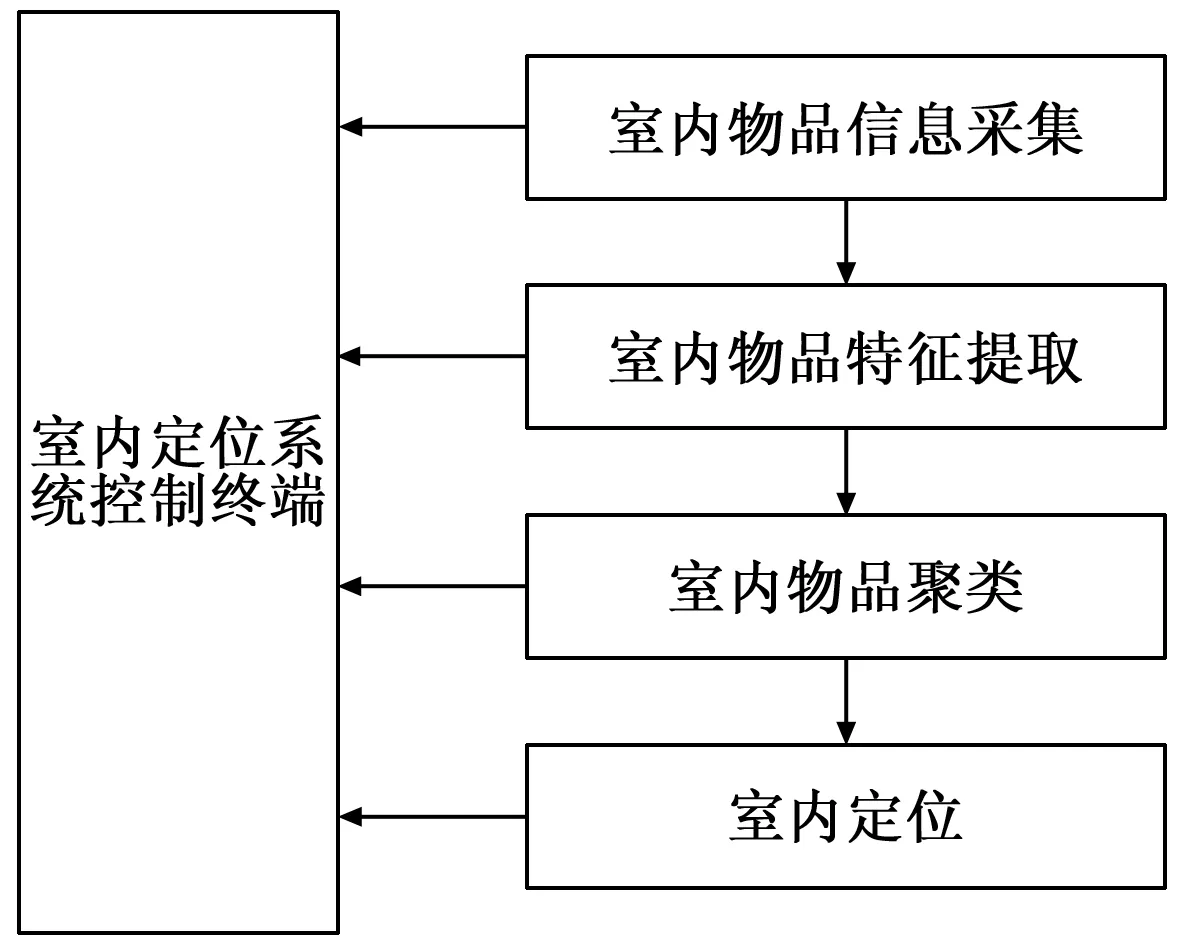
图1 室内定位系统结构图
分析图1可知,室内定位系统结构主要由:室内物品信息采集、室内物品特征提取、室内物品聚类以及室内定位四部分组成。由室内定位系统终端控制其他各个组成部分,为加快室内定位系统的设计速度,对室内物品的信息进行采集,并对室内物品进行特征提取,为提高定位精度,对室内物品进行聚类操作,以上述结果为依据,完成对室内定位系统的设计,1.2和1.3中所述的室内物品包含室内的人员和物品。
1.2 室内物品聚类
以1.1中各项信息为基础,利用模糊C均值法实现室内物品的聚类。本文聚类分析目标是将室内物品特征空间的一组数据,按模糊C均值法划分为若干个类别。
假设,将室内各地n个p维数据点集合X={x1,x2,…,xn}划分为C个模糊类:Ai(i=1,2,…,C),使X中的任意一个分量Xk∈Rp隶属度Ai(xk)全都满足下列条件:
(1)
其中:i代表室内物品数量,k代表室内物品信息数据点分量,则模糊聚类Ai的聚类中心可表示为:
(2)
其中:Vi代表模糊聚类Ai的聚类中心,且Vi∈Rp,m代表一个大于1的实数,实际上,Vi代表类Ai隶属度加权的平均值。模糊C均值聚类法使数据点xk向一个或多个室内物品信息数据聚类中心逼近,则将下列公式最小化:
(3)
使得:
(4)
其中:
(5)

综上所述,利用模糊C均值聚类法将获取到的室内物品信息数据,划分为若干个类别,并将这些类别中的数据点最多的类别留下,去除其他的类别。以聚类后获得的室内物品信息数据更接近于真实点的坐标为依据,提高室内定位系统的定位准确率。
1.3 室内定位
以1.2中的聚类结果当作室内定位的基础,利用类匹配对室内物品进行粗定位,再利用加权K近邻算法和进行精定位,得出室内物品位置坐标,实现了室内定位系统的设。具体步骤如下:
将在线室内定位在定位系统终端测量的RSSI向量定义为:
ψr=[ψ1,r,ψ2,r,…,ψL,r]T
(6)
其中:ψ代表在线室内定位在定位系统终端测量的RSSI向量,r代表在线测量次数,T代表在线测量的阈值,{ψk,r,k∈{1,2,…,L}}代表APk在线测量值。综上利用类匹配对室内物品进行粗定位,室内定位终端设备从服务器下载室内信息数据聚类中心测量值集合ψH={ψj/∀j∈H},对在线测量值ψr以及每个室内物品信息数据聚类中心的相似度进行计算,从而确定该测量值所属类别。聚类中心来自于矩阵ψC,假设室内物品位于聚类边缘位置,如果只选取相似度最大的类别,有可能致使类别匹配失败。针对这种情况,室内粗定位恰好能够保留相似度比较大的若干聚类,并在该聚类上进行定位,解决了上述问题。
假设,HMatch代表室内物品信息数据与在线测量值相似度比较大的聚类中心的集合,集合CMatch是由聚类中心在HMatch中的类别成员所构成的,则HMatch的计算方式为:
(7)
其中:
(8)

将βj进行归一化,则:
(9)

(10)
CMatch=∪Cj
(11)
其中:H代表聚类中心,Cj代表室内粗定位聚类中心,λ代表室内粗定位中室内物品信息数据聚类的预定义门限,该门限可以对匹配类的数量进行控制,定义λ=0.03。

∀j∈CMatch]
(12)

(13)
依据加权K近邻算法的原理,计算出有最小距离的K个参考点,使室内定位终端请求服务器,传输K个最近邻点坐标集合到室内定位系统中。对于距离加权的K近邻算法,观察K个最近邻点分布并对该最近邻点进行加权操作。一般情况下,室内信号空间的距离d越小,其物理空间也就越近。因此需要对K个近邻点进行赋权重操作,且求得的权重值要比直接求K个近邻点的平均值更加合理。综上可利用室内信号空间距离倒数当作加权系数,则有公式:

(14)
其中:ωj代表室内信号空间距离倒数,由此可知室内物品当前的位置为:
(15)

2 仿真实验
2.1 仿真实验步骤
为证明基于超宽带技术的室内定位系统设计方法的整体有效性,需要进行一次仿真实验。步骤如下:
1)在LabVIEW的环境下搭建室内定位实验仿真平台。实验数据取自于北京第一实验小学三年一班,利用本文所提方法对其室内安装定位系统,观察该方法下的室内定位系统的有效性和可实践性。计算不同方法下室内定位准确度,进行数据对比分析;
2)对室内物品进行聚类操作,计算不同方法下室内定位结果平均偏差,对结果进行研究分析;
3)将室内物品特征空间中的一组数据,划分为若干个类,对不同方法下室内定位所用时间进行对比;
4)对室内物品信息采集、征提取以及聚类各个部分工明确,将同方法下室内物品信息数据所占定位系统存储空间进行对比研究。
2.2 仿真实验结果及分析
表1是不同方法下室内定位准确度(%)对比。下式为室内定位准确度公式:
(16)
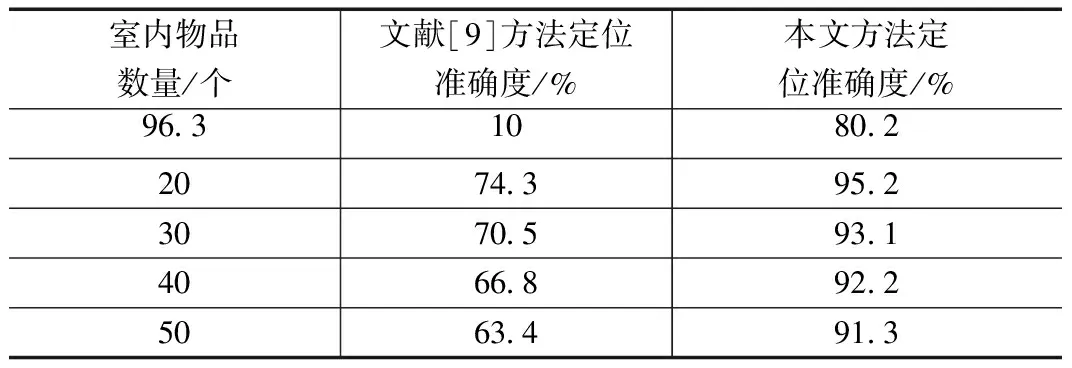
表1 不同方法下室内定位准确度对比
分析表1可知,本文所提方法的室内定位准确度明显高于文献[9]所提方法。文献[9]所提方法在进行室内定位系统设计时,当使用者有定位需求,便向底层的WiFi模块发出请求,并将请求发送至服务器终端,服务器终端依据上述请求对室内物品的位置进行定位,再将定位信息返还至定位移动终端。在这一步骤中,定位请求所用时间较长,而且请求中容易造成信息丢失的情况,导致室内定位准确度较低。而本文所提方法为了提高室内定位准确度,利用室内粗定位和精定位相结合的方式完成室内定位。综上分析,证明了本文所提方法具有很高的可行性。表2是当室内物品数量不断变化时,不同方法下的室内定位结果平均偏差(cm)对比。计算公式为:

(17)


表2 不同方法下室内定位结果平均偏差对比
通过表2可知,随着室内物品的不断增加,室内定位结果平均偏差逐渐增加。文献[10]所提方法在解析WiFi技术理论和WiFi室内定位方法,结合室内定位影响因素,对室内定位系统的性能指标进行讨论时,并没有考虑到定位系统性能指标的多变性,对该性能指标的理解比较单一,导致室内定位系统在定位时,平均偏差较大,不适用于大规模的室内定位。而本文所提方法在进行室内定位系统设计时,对室内物品进行聚类操作,使室内定位结果的平均偏差相对较小,这说明了本文所提方法是切实可靠的。图2是不同方法下室内定位所用时间(s)对比。
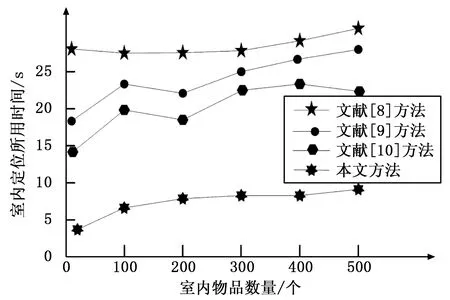
图2 不同方法下室内定位所用时间对比
对图2进行分析,文献所提方法的室内定位所用时间普遍高于本文所提方法的室内定位所用时间。文献[8]所提方法定位时间曲线波动相对平缓,但是随着室内物品的增加,定位时间居高不下;文献[9]所提方法室内物品数量在200个之前,定位所用时间曲线起伏较大,室内物品数量在200个之后,时间曲线呈直线上升状态;文献[10]所提方法的室内定位所用时间曲线波动一直很大,但是当室内物品数量在400-500个后,时间曲线有下降趋势,相比文献[8]和文献[9]所提的室内定位系统设计方法更显优越。本文所提方法是将室内物品特征空间中的一组数据,划分为若干个类,该步骤为减少室内定位所用时间提供了支撑。进一步证明本文所提方法的整体有效性。图3是不同方法下室内物品信息数据所占定位系统存储空间(GB)对比。
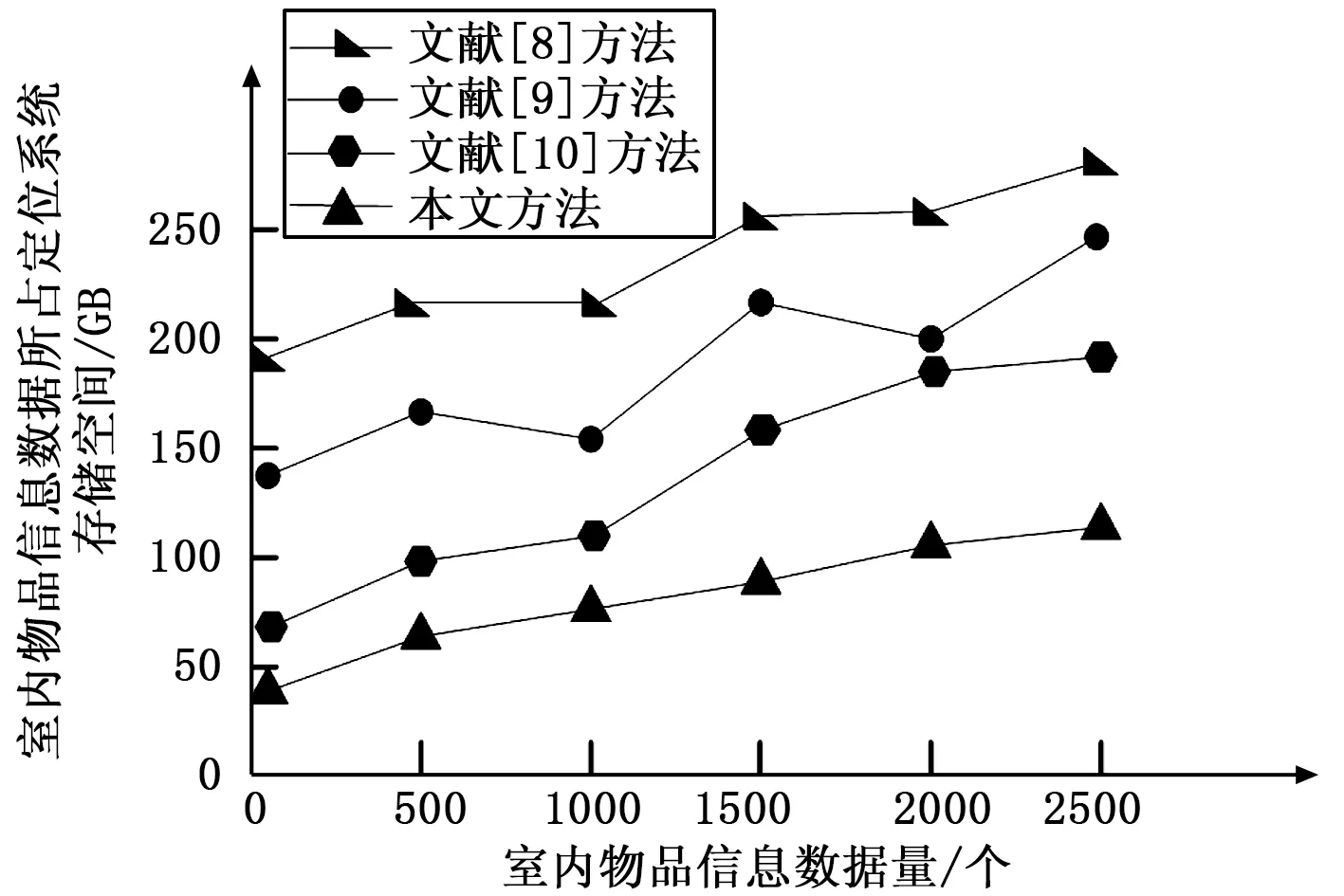
图3 不同方法下室内物品信息数据所占定位系统存储空间对比
分析图3可以得到,不同方法下室内物品信息数据所占室内定位系统存储空间大小的对比,且通过该对比可以明显看出本文方法优势所在。文献[8]、文献[9]和文献[10]所提方法室内物品信息数据占定位系统存储空间,明显大于本文所提方法。文献[8]所提方法中,对当前的室内定位系统进行了一系列的讨论和研究,构建了基于ZigBee技术的室内定位系统总方案,构建方案时并没有考虑到室内物品信息数据占定位系统存储空间大小,致使设计出的室内定位系统存储空间较小;文献[9]所提方法中,位置指纹产生的数据库所占存储空间很大,定位系统的存储空间易满;文献[10]所提方法中,对无线AP信号进行提取,并建立接收信号强度的数据库,该数据库所占定位系统存储空间较大,减了定位系统的存储空间。与之相比,本文所提方法在对室内定位系统的硬件进行设计时,室内物品的信息采集,特征提取以及聚类各个部分工明确,使室内物品信息数据所占存储空间较小。该对比证明本文所提方法具有较高的可实践性。
仿真实验证明,所提方法可以准确地对室内定位系统进行设计,为该领域的后续发展提供借鉴意义。
3 结束语
采用当前方法对室内定位系统进行设计时,无法准确描述出室内各种物品或人员的具体位置,存在定位偏差大的问题,提出一种基于超宽带技术的室内定位系统设计方法。并通过仿真实验证明,所提方法可以准确地对室内定位系统进行设计,为该领域的研究发展树立旗帜。
[1]周 亮,付永涛,李广军.无线定位与惯性导航结合的室内定位系统设计[J].电子技术应用,2014,40(4):73-76.
[2]刘洺辛,孙建利.基于能效的WLAN室内定位系统模型设计与实现[J].仪器仪表学报,2014,35(5):1169-1178.
[3]刘小康,郭 杭.基于Zigbee室内定位系统的指纹库优化算法[J].计算机工程,2014,40(2):193-198.
[4]张 勇,徐小龙,徐科宇.基于加权质心法的WLAN室内定位系统[J].电子测量与仪器学报,2015,29(7)1:1036-1041.
[5]杨增瑞,段其昌,毛明轩,等.基于磁场指纹辅助的手机室内定位系统[J].传感技术学报,2016,29(9):1441-1448.
[6]陈天啸,曾鹏飞,虞致国,等.iOS平台下惯性室内定位系统设计与实现[J].计算机工程与应用,2014,50(15):207-210.
[7]马鑫迪,马建峰,高 胜.室内定位系统中指纹库的优化方法[J].西安电子科技大学学报自然科学版,2015,42(6):81-87.
[8]吴友宝,徐建闽.基于二维码和A*算法的室内精准定位导航系统[J].电子设计工程,2016,24(23):23-25.
[9]石雪军,纪志成.基于射频识别的室内定位系统算法研究[J].系统仿真学报,2015,27(6):1294-1300.
[10]徐潇潇,谢林柏,彭 力.基于WiFi信号强度特征的室内定位系统设计[J].计算机工程,2015,41(4):87-91.
IndoorPositioningSystemDesignBasedonUWBTechnology
Chen Weisen1, Pei Hailong2, Xia Ruican2
(1. Guangzhou Institute of Technology,Guangzhou 510075,China;2.School of Electrical Engineering South China university of Technology,Guangzhou 510075,China)
In order to ensure the safety of indoor personnel and goods, and meet the needs of people’s daily life, the indoor positioning system should be designed. The current method is to design the indoor positioning system using ultrasonic or infrared, radio frequency identification technology, system hardware equipment expensive, complex installation process, cause the system installation requirements of the environment is too high, not suitable for large scale indoor positioning system design, the problems of low efficiency and slow speed. This paper presents a design method of indoor positioning system based on UWB technology. This method firstly uses the history of indoor positioning system design method and the design requirements of the indoor positioning system, indoor positioning system hardware construction, and then to the hardware on the basis of using fuzzy C means method of indoor items feature space information data, divided into several categories, and a number of data categories in the largest category of data points left fine positioning and indoor use, indoor location class matching based on weighted K nearest neighbor algorithm based, complete the design of indoor positioning system. The experimental results show that the proposed method can be used to design the indoor positioning system, reduce the indoor positioning time and improve the positioning efficiency.
UWB technology; indoor positioning; system design
2017-02-21;
2017-02-21。
广东省科技计划项目(2013B020200006)。
陈伟森(1973-),男,广东南海人,硕士,讲师,主要从事计算机应用技术、物联网技术方向的研究。
1671-4598(2017)11-0179-04
10.16526/j.cnki.11-4762/tp.2017.11.045
TN92
A
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
小学生学习指导(低年级)(2022年5期)2022-05-31
智能计算机与应用(2021年6期)2021-12-17
疯狂英语·初中天地(2021年11期)2021-02-16
综艺报(2020年21期)2020-11-30
电脑爱好者(2019年17期)2019-10-30
少年漫画(艺术创想)(2019年2期)2019-06-06
宇航计测技术(2018年3期)2018-09-08
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
