
一种蛇形放疗机器人的治疗计划系统软件平台
2017-12-14 06:31李雅芬邹炼谢耀钦熊璟
中国医疗器械杂志 2017年6期
【作 者】李雅芬,邹炼,谢耀钦,熊璟
1 中国科学院深圳先进技术研究院,深圳市,518055 2 中国科学院大学深圳先进技术学院,深圳市,518055 3 四川省人民医院肿瘤中心,成都市,610072
一种蛇形放疗机器人的治疗计划系统软件平台
【作 者】李雅芬1,2,邹炼1,3,谢耀钦1,熊璟1
1 中国科学院深圳先进技术研究院,深圳市,518055 2 中国科学院大学深圳先进技术学院,深圳市,518055 3 四川省人民医院肿瘤中心,成都市,610072
该文为新研发的蛇形放疗机器人开发了一种集成制定治疗计划及导航功能的治疗计划系统软件平台。该软件平台基于3D Slicer医学图像可视化及分析平台和SlicerRT软件包,采用了模块插件的形式进行开发,实现了影像数据处理、放疗路径规划、治疗计划评估的治疗计划功能,以及光学引导放疗的功能,为蛇形放疗机器人提供了一个易于扩展的软件实验平台,有利于近距离放疗系统的研发及测试实验工作。
蛇形放疗机器人;近距离放疗;治疗计划系统;光学导航
0 引言
近距离放疗是表浅肿瘤治疗的重要手段之一,是外照射放疗的重要补充手段[1-4],治疗时可实现局部的高剂量以保证疗效,而周围正常组织受量很低从而得到有效地保护。中科院深圳先进技术研究院医疗机器人与微创手术器械研究中心研发了一种新型的蛇形放疗机器人实验样机,可用于实施近距离放疗技术。它是将放射源置于蛇形机器人的最前端,通过控制整个蛇体部分的运动从而使放射源在腔道中自由移动,在实施放疗期间,对蛇头部分进行实时光学定位,从而实现对放射源方位及驻留时间的实时调控,使蛇形放疗机器人具备辐照靶区、规避正常组织的放疗实力。肿瘤放疗的发展非常依赖于专业的治疗计划系统软件,治疗计划系统是根据病人的定位医学图像、放疗设备参数来模拟真实的放疗环境,制定出满足靶区处方剂量和危及器官限制剂量的治疗计划,治疗计划系统的开发设计是实施放疗的基础和关键[5],因此对于蛇形放疗机器人的研发推进是不可或缺的软件。
目前在放疗领域中,商用的放疗计划系统常常是封闭系统,对于科研工作的使用多有不便,且也不能直接应用于这样一个新研发的蛇形放疗机器人,不能满足其功能需求。蛇形放疗机器人需要实现制定放疗计划、形成蛇形机器人运动轨迹参数、治疗前CBCT影像引导以及应用光学手段进行治疗的实时追踪等多项功能,因此需要的是一个可扩展的软件实验平台,可集成治疗计划系统及实时导航系统,并且支持后续研发的功能扩展工作。3D Slicer[6]是一个由美国NIH资助研发的医学图像数据处理的免费开源平台,它为研究人员提供了强大的图像处理功能、三维可视化及数据分析工具,支持多种操作系统。SlicerRT[7]是3D Slicer的一个扩展包,也是一个免费开源的可视化和图像处理软件,主要用于自适应放射治疗的研究工作。SlicerRT包含了常用的放疗研究工作流及近20个放疗研究的工具模块,包含先进的变形配准方法,可以用到治疗计划系统中。本文就介绍了我们基于3D Slicer 和SlicerRT,开发了一个应用于蛇形放疗机器人的治疗计划系统软件平台SRPLAN,在SRPLAN中整合了实时光学导航的功能,为蛇形放疗机器人的进一步优化研发提供了个性化定制的软件实验平台。
1 材料与方法
1.1 系统要求
蛇形放疗机器人治疗计划系统软件平台SRPLAN的开发基于Windows10操作系统,QT 5.6和Microsoft Visual C++2015开发环境。
1.2 模块化开发设计
SRPLAN平台在主界面设计上保证软件平台应用程序的整体性,采用模块插件的形式进行开发。如图1所示,根据蛇形放疗机器人的功能需求,SRPLAN软件平台模块设计框架设置了开始模块,影像读取显示模块,影像分割模块,放射源路径规划模块,治疗计划评估模块,以及蛇形放疗机器人特有的实时光学引导放疗模块,随着软件的功能需求改变和增加,可以独立修改完善各个插件或添加新的功能模块插件。
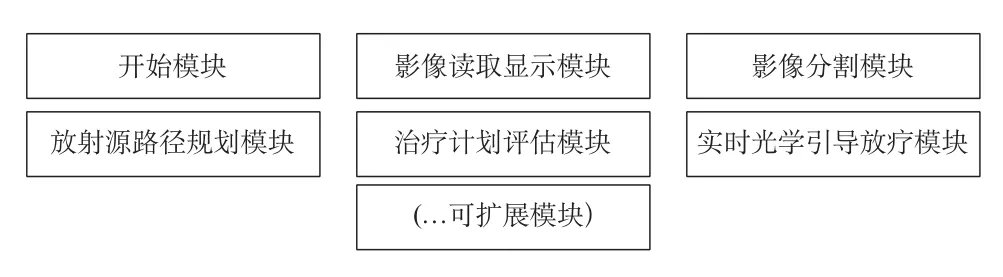
图1 SRPLAN软件平台模块设计框架Fig. 1 Module plugin framework of SRPLAN software platform
图2 是SRPLAN软件平台的基本开始界面,在开始界面菜单栏可以自由切换各个功能模块。其中:影像读取显示模块用于读取病人或模体的meta、nrrd格式的影像数据,在主界面的横断面、冠状面、矢状面三视图下进行显示且窗宽窗位可调。影像分割模块用于手动分割影像或通过影像阈值自动分割影像,对所分割的结构进行轮廓编辑,包括修改或删除轮廓、命名及颜色设置,通过设置各结构的透明度以实现各结构的层次观察;在三视图上显示二维的轮廓信息,产生并显示三维的轮廓信息。治疗计划评估模块通过等剂量线和DVH来评估放疗剂量,在横断面、矢状面、冠状面均可以显示等剂量线,等剂量线颜色和透明度可编辑;对给定结构进行体积、相对剂量的平均、最大、最小值的统计并绘制DVH曲线,DVH曲线上各个位置的剂量和体积值可读。
图2 蛇形机器人放疗计划系统软件平台界面Fig. 2 The GUI of SRPLAN software platform
1.3 模块插件设计
图3展示了SRPLAN软件平台中各个功能模块的基本构成,包括数据管理、模块逻辑和模块界面。SRPLAN采用MRML数据管理,MRML库提供了管理各种医学图像数据类型的接口,每一种数据类型都是由特定MRML节点表示,用于存储系统的状态,包括原始数据和可视化参数。如图4所示,蛇形放疗机器人软件平台SRPLAN自定义了节点类层次结构,包括病人信息(PatientNode),病程信息(CourseNode),治疗计划数据(PlanNode),影像及影像分割数据等,其中病人信息是病程信息的父类,病程信息是治疗计划数据的父类,治疗计划数据包含了病人的影像、影像分割信息及路径规划等数据节点。SRPLAN通过MRML Scene管理所有的MRML节点,可以实现增加、删除或查找、按类查找等读写和管理功能,当软件平台中Logic 和GUI(QT Widget)检测到MRML Scene的任何一种改变,系统就会作出相应的处理响应。
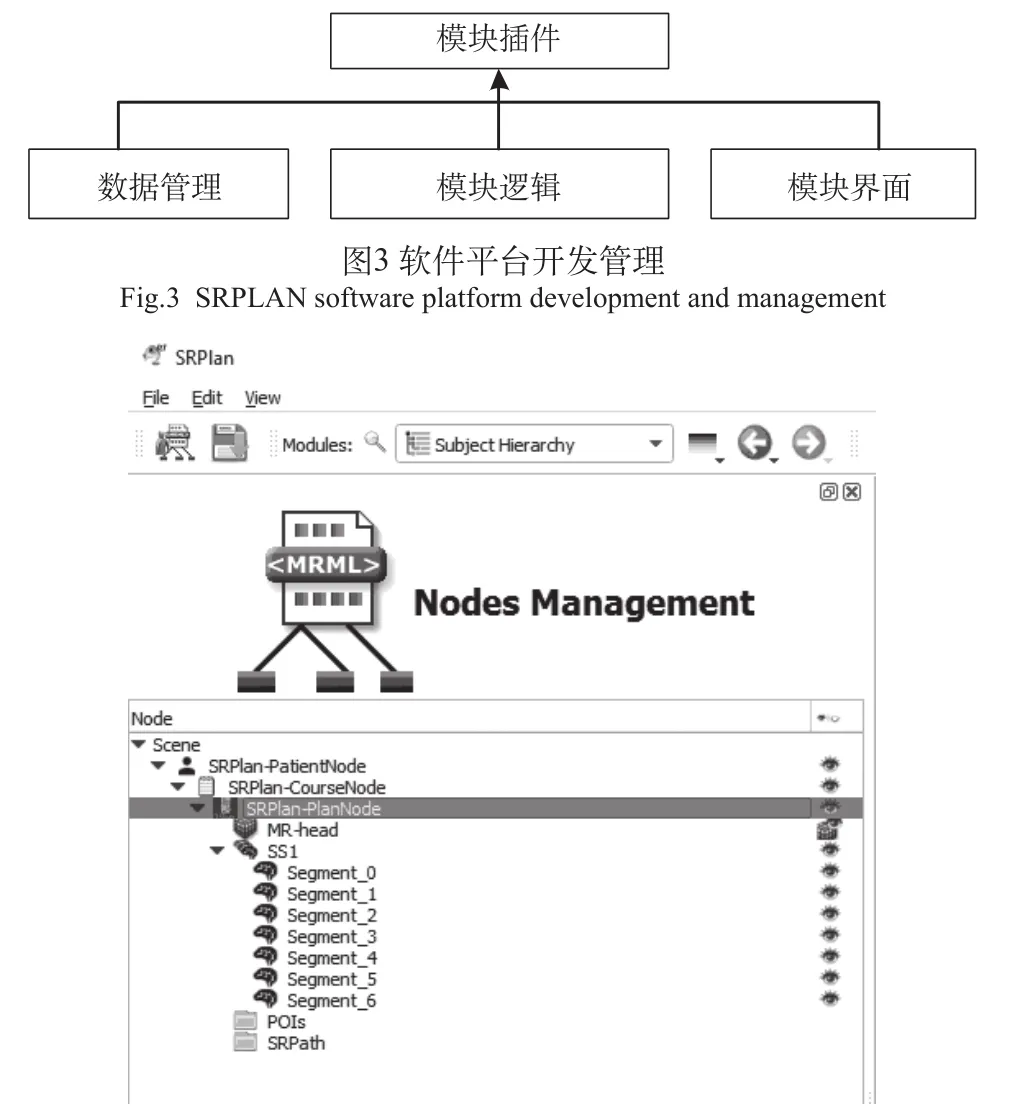
图4 软件平台MRML数据管理Fig.4 MRML nodes management of SRPLAN
1.4 放疗路径规划模块设计
SRPLAN平台路径规划模块要设计实现蛇形放疗机器人的正向放疗计划方式,并进行剂量计算,最终形成可实施的蛇形机器人运动的轨迹参数,从而实现放疗功能。蛇形机器人的放射源在此被视作点源,在该模块中设计了两种方式手动规划放射源点源的驻留位置,一种是直接在SRPLAN显示的病人三视图影像界面上选取驻留点,另一种则是在SRPLAN的控制界面上输入驻留点的三维空间坐标信息,每个驻留点对总体剂量的贡献权重可调,然后再根据点源辐射场的吸收剂量率公式D=进行剂量计算[8],在本模块中采用了铱192点源模型,其中A为源的放射性活度,Г为放射性核素的照射量率常数,r是点源到计算场点的距离,f是照射量转换为吸收剂量的转换系数。通过调整蛇形机器人驻留点位置及权重即调整规划蛇形机器人的运动轨迹参数来改变剂量计算的结果,直到剂量计算结果满足处方剂量。
1.5 实时光学导航模块设计
SRPLAN软件平台集成了蛇形放疗机器人特有的实时光学引导放疗模块。蛇形放疗机器人在蛇头部位也就是放射源所在部位设置了光学定标,通过光学定位系统可以实时返回放射源的坐标信息。设置SRPLAN中影像显示的三维坐标系,使其与蛇形机器人的空间运动坐标系保持一致,即与光学定位系统相一致。蛇形机器人运动时,通过SRPLAN软件平台实时读取光学坐标信息,并在SRPLAN主界面的3D视图中实时动态显示光标位移变化,同时在横断面、冠状面、矢状面分别显示光标位置,从而实现应用光学手段对治疗的实时追踪。
2 结果
2.1 治疗计划功能
蛇形放疗机器人SRPLAN软件平台实现了影像读取显示模块、影像分割模块、放射源路径规划模块、治疗计划评估模块各自的功能,它们共同实现了放疗计划系统的基本功能,支持CT、MRI等影像上进行靶区与正常组织的勾画,支持正向设计治疗路径和剂量计算剂量评估。图5展示了SRPLAN采用宫颈癌病例数据制定的一个放疗计划的剂量分布,其中图5(b)是图5(a)的局部放大,红色曲线是勾画的靶区, path-4, path-5和path-6是通过放疗路径规划模块设置的放射源驻留点,黄色和绿色曲线是治疗计划的等剂量线,分别代表70%和50%处方剂量所包含的区域。
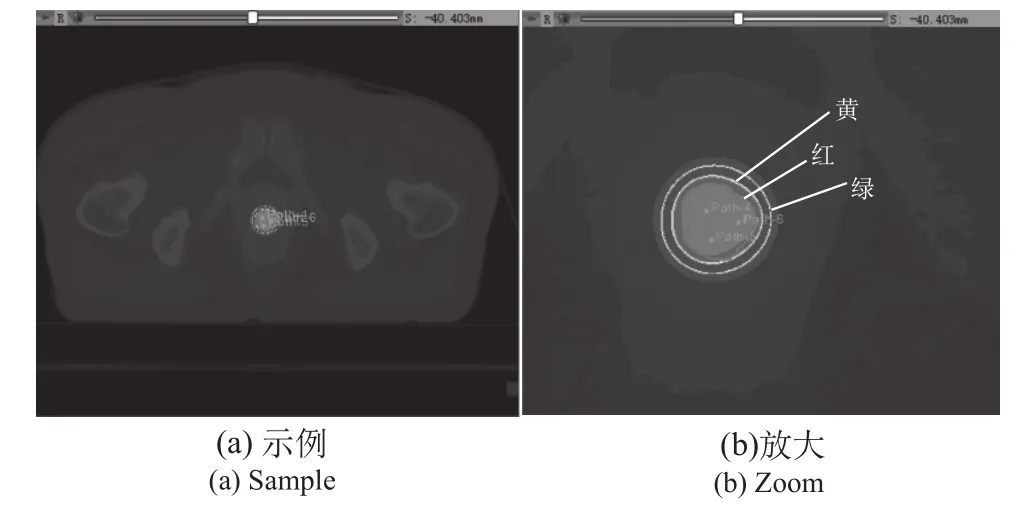
图5 SRPLAN制定的一个放疗计划示例Fig. 5 A treatment plan made by SRPLAN software platform
2.2 实时光学导航功能
实时光学引导放疗模块中,为SRPLAN设计的读取速度满足光学定标系统输出光学坐标信息,可以实时读取蛇形机器人发送过来的放射源光学坐标,动态显示放射源的三维空间位置和三视图投影。治疗时,蛇形机器人的运动控制可参考导航模块的放射源位置信息,使放射源到达预先规划路径上的驻留点位置,从而实现光学导航功能。图6是靶区和光学定位的放射源在三维视图中的相对位置显示,用以表示放射源位置的圆锥的透明度可以调整,在治疗过程中可以根据三维视图上的圆锥运动,来调整蛇形机器人上放射源的运动轨迹,使其按照规划的驻留点位置辐照靶区,达到实时引导治疗的目的。
3 讨论
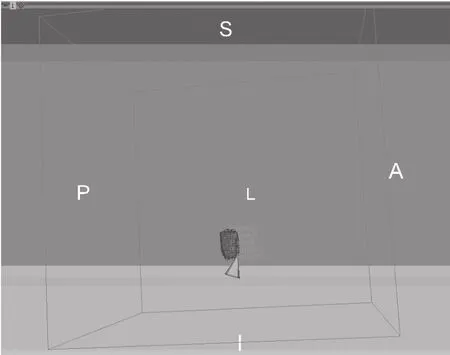
图6 光学定位放射源及靶区的三维视图显示Fig.6 3D view of the target and optical location of the radiation source
对于新研发的用于放疗的蛇形机器人,必须有一个专用放疗软件系统平台来实现其专业功能,并能随着研发工作不断更新,满足新的功能和实验测试需求,既要满足放疗流程的标准化应用,又便于为近距离放疗蛇形机器人进行定制化开发。目前尚无其它用于近距离放疗的蛇形机器人,所以也没有可直接参考的软件系统平台。虽然也有开源的放疗工具如CERR[9],PLUNC[10],dicompyler[11]或MMCTP[12],但它们都有自身的一些局限性,包括依赖于商业封闭源代码的软件包(Matlab)、有限的授权使用(非免费开源)、大型的非模块化代码库、缺乏文档、对用户和开发者支持不足、依赖于特定数据格式、难以扩展,等等,因此均未能成为功能完备、便于标准化应用的放疗研究平台。而3D Slicer作为一个易于扩展的开源平台,是专门为可视化医学图像处理和图像引导而开发,是一个已得到广泛应用的良好实验开发平台[13-14],可为放疗科研工作提供丰富的通用软件功能选项[15-16]。SlicerRT软件包可以弥补上述其它开源放疗工具的不足。因此,本文提出的蛇形放疗机器人治疗计划系统平台SRPLAN就选择了基于3D Slicer及SlicerRT进行开发。基于3D Slicer所提供的骨架构建了SRPLAN应用程序的启动框架,使之适合蛇形机器人使用;采用程序功能的模块化设计,借鉴吸收了开源软件现有模块的部分功能并开发了蛇形机器人特有的模块。SRPLAN基于XML文件(MRML)进行数据管理,功能模块Logic、界面、MRML 节点相分离,目前支持多种数据格式,模块化设计灵活性高,可扩展性强,便于在平台上添加个性化定制的功能模块,具备近距离治疗放疗计划系统功能,以及蛇形机器人光学导航功能,为蛇形放疗机器人提供了一个灵活可靠的软件实验平台。
蛇形放疗机器人治疗计划系统软件平台SRPLAN的下一步工作是实现X射线引导放疗模块。蛇形放疗机器人可以在治疗时通过CBCT采集X射线图像,X射线三维成像耗时过长,不适于实时监控,而X射线二维影像采集方便快速,实时性强,但不能提供空间信息。将治疗前的病人或模体的影像数据进行三维重建,通过CBCT实时采集蛇形放疗机器人对病人或模体进行治疗时的二维影像,将二维影像实时导入SRPLAN,与三维重建影像数据快速配准[17-18],就可以实时监控蛇形放疗机器人的位置,实现X射线引导放疗。
4 结论
本文开发的蛇形放疗机器人治疗计划系统软件实验平台SRPLAN,具备放射治疗计划系统的多模态影像数据读取、分割,制定放疗计划,剂量评估的基本功能,同时加入了蛇形放疗机器人特有的光学导航功能。该系统不仅适用于本文专用的蛇形放疗机器人,也是一个良好的治疗计划系统软件平台,适用于其它近距离放疗的研发工作。采用模块插件的形式进行开发的特点,使该实验平台具有良好的可扩展性,未来可随着蛇形放疗机器人的研发工作进展灵活加入各种有益于科研及教学的应用模块。
[1] Strom T J, Cruz A A, Figura N B, et al. Health-related quality-oflife changes due to high-dose-rate brachytherapy, low-dose-rate brachytherapy, or intensity-modulated radiation therapy for prostate cancer[J]. Brachytherapy, 2015, 14(6): 818-825.
[2] Yao L, Jiang Y, Jiang P, et al. CT-guided permanent 125I seed interstitial brachytherapy for recurrent retroperitoneal lymph node metastases after external beam radiotherapy[J]. Brachytherapy,2015, 14(5):662-669.
[3] Amini A, Jones B L, Jackson M W, et al. Survival outcomes of combined external beam radiotherapy and brachytherapy vs.brachytherapy alone for intermediate-risk prostate cancer patients using the National Cancer Data Base[J]. Brachytherapy, 2016,15(2):136-146.
[4] 李大鹏, 余辉, 闫微, 等. 后装治疗机的现状及其在宫颈癌中的应用[J]. 医疗设备信息, 2007, 22(3):65-67.
[5] 余辉, 徐海荣, 张书旭, 等. 基于CT图像的三维后装腔内治疗计划系统的研制[J]. 中国医疗器械杂志, 2008, 32(2):93-96.
[6] Pieper S, Halle M, Kikinis R. 3-D slicer[J]. Proc IEEE Biomed,Imag, 2004, 1, 632-635.
[7] Pinter C, Lasso A, Wang A, et al. SlicerRT: radiation therapy research toolkit for 3D Slicer[J]. Med Phys, 2012, 39(10):6332-6338.
[8] 王春燕, 刘漪, 刘云鹏, 等. 基于Monte Carlo 方法的放射治疗剂量分布计算方法的研究[J]. 医疗设备信息, 2007, 22(4): 8-10.
[9] Deasy J O, Blanco A I, Clark V H. CERR: A computational environment for radiotherapy research[J]. Med Phys, 2003,30(5):979-985.
[10] http://planunc.radonc.unc.edu[OL].
[11] http://code.google.com/p/dicompyler[OL].
[12] Alexander A, Deblois F, Stroian G, et al. MMCTP: A radiotherapy research environment for Monte Carlo and patient-specific treatment planning[J]. Phys Med Biol, 2007, 52(13):297-308.
[13] Siavashpour Z, Aghamiri M R, Jaberi R, et al. Evaluating the utility of quot;3D Slicerquot; as a fast and independent tool to assess intrafractional organ dose variations in gynecological brachytherapy[J]. Brachytherapy, 2016, 15(4):514-523.
[14] Fedorov A, Beichel R, Kalpathy-Cramer. 3D Slicer as an image computing platform for the quantitative imaging network[J]. Magn Reson Imaging, 2012, 30(9):1323-1341.
[15] Cheng G Z, San Jose Estepar R, Folch E, et al. Three-dimensional printing and 3D slicer: powerful tools in understanding and treating structural lung disease[J]. Chest, 2016, 149(5):1136-1142.
[16] Velazquez E R, Parmar C, Jermoumi M, et al. Volumetric CT-based segmentation of NSCLC using 3D-Slicer[J]. Sci Rep, 2013, 3:3529.
[17] 赵越. 面向精准放疗装置的医学影像三维建模与配准技术研究[D]. 苏州: 苏州大学, 2014.
[18] 杨晓冬. 影像导航手术中2D/3D图像配准[D]. 北京: 中国科学院大学, 2015.
A Software Platform of Treatment Planning System for Radiotherapy Snake Robot
【 Writers 】LI Yafen1,2, ZOU Lian1,3, XIE Yaoqin1, XIONG Jing1
1 Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, Shenzhen, 518055 2 Shenzhen College of Advanced Technology, University of Chinese Academy of Sciences, Shenzhen, 518055 3 Cancer Center, Sichuan Provincial People's Hospital, Chengdu, 610072
A software platform integrated of radiation treatment planning system and navigation system has been developed for a newly-developed snake robot. This platform is developed in a module-plugin form based on 3D Slicer medical image visualization and analysis application platform and an open-source toolkit SlicerRT. The platform realized function modules of image access and visualization, image segmentation, radiation path planning, treatment planning evaluation and optical navigation, and has provided the snake robot an extensible software experiment platform. It is bene fi cial for the brachytherapy research work and experiments.
snake robot for radiotherapy, brachytherapy, treatment planning system, optical navigation
R730.55
A
10.3969/j.issn.1671-7104.2017.06.001
1671-7104(2017)06-0391-04
2017-01-17
广东省影像引导治疗技术创新团队(2011S013);深圳市海外高层次人才技术创新项目(KQJSCX20160301144248) ,国家重点研发计划(2016YFC0105102)
谢耀钦,教授,E-mail: yq.xie@siat.ac.cn;熊璟,高级工程师,E-mail: jing.xiong@siat.ac.cn
猜你喜欢
核安全(2022年3期)2022-06-29
核安全(2022年3期)2022-06-29
初中生学习指导·中考版(2022年4期)2022-05-12
核安全(2021年6期)2021-12-31
军事文摘(2021年18期)2021-12-02
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化·中考版(2016年2期)2016-09-10
小资CHIC!ELEGANCE(2016年19期)2016-08-17
航天返回与遥感(2014年1期)2014-07-31
同位素(2014年2期)2014-04-16
