履带式电动拖拉机驱动系统控制策略的研究
2017-12-06 02:37商高高张建舟张家俊
重庆理工大学学报(自然科学) 2017年11期
商高高,张建舟,张家俊
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
履带式电动拖拉机驱动系统控制策略的研究
商高高,张建舟,张家俊
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
为提高履带式电动拖拉机工作效率,设计了一套整机驱动系统控制策略。其中,在正常工作模式下设计建立了模糊自调整PID控制策略,在失效模式下设计了跛行行车的控制策略。运用Matlab/Simulink对整机驱动系统各个模式的控制策略进行仿真研究。仿真结果表明:在运输模式下,拖拉机能够实现目标速度的跟踪,在犁耕工作模式下,拖拉机的速度脉动在可接受的范围内,且转矩补偿能够实现驱动阻力变化的跟踪;在跛行行车控制策略下,进入跛行行车模式之后,整机以固定速度运行,并且SOC下降速度明显变缓。
电动拖拉机;驱动系统;控制策略
与电动汽车的快速发展相比,电动拖拉机的发展相对缓慢,尤其是对其驱动系统控制策略的研究基本处于起步阶段。驱动系统是整个履带式电动拖拉机动力系统的核心,其控制策略的好坏直接影响整机的动力性以及经济性。因此,对电动拖拉机驱动系统控制策略的研究具有重要意义[1-3]。
本文运用Matlab/Simulink对整机驱动系统各个模式的控制策略进行仿真研究。在已有的传动系统布置、以及选用的无刷直流电机和电机的直接转矩控制的基础上,根据建立的履带式电动拖拉机运输作业模式力学模型以及犁耕作业模式时的力学模型,建立履带式电动拖拉机驱动系统具体的控制仿真模型,并为此模型建立合适有效的控制策略。
1 驱动模式分析
履带式电动拖拉机在田间作业时,根据电动拖拉机的挡位、加速踏板和制动踏板的位置信号、电池的SOC状态、提升装置信号以及其他传感器信号,将电动拖拉机分为3种驱动模式[4-5]:起车模式、正常驱动模式和失效模式。3种驱动模式的具体内容如下:
1) 起车模式:是指电动拖拉机已经接通电源,而司机还没有踩下油门踏板,电机提供一个较小转矩,此转矩的主要作用是使电动拖拉机以一个恒定的较小的速度运行。
2) 正常驱动模式:包含运输作业模式和犁耕作业模式。整车的控制策略会根据加速踏板的位置、拖拉机的行驶速度、提升装置的位置以及其他传感器的信号来控制电机转矩驱动拖拉机以一定的车速行驶。
3) 失效模式:是指拖拉机的驱动系统出现严重故障或者蓄电池的SOC值低于某个设定的阈值时,对动力电池的放电电流以及电机的输出转矩进行限制,防止放电电流过大引起危险,并使拖拉机能够跛行至维修点维修或者充电。
2 控制策略设计
2.1 正常驱动模式
电动拖拉机在正常驱动模式作业时,大棚内田间路面状况复杂,拖拉机工作阻力不可预知,传统的PID控制在驱动系统中很难得到理想的结果。因此,本文选取模糊自调整PID作为电动拖拉机驱动系统在正常驱动模式下的控制策略,以提高电机的运行效率。
2.1.1 模糊自调整PID控制系统模型
模糊自调整PID控制是利用专家的实际操作经验作为操作规则存储到微机当中,在控制过程中,PID的3个参数KP、Ti、Td会根据实际输入量进行调整,这种控制方法集合了模糊控制和PID控制的优点[4-9]。其中:KP为比例调节系数;Ti为积分调节系数;Td为微分调节系数。图1所示为模糊自调整PID控制结构原理。
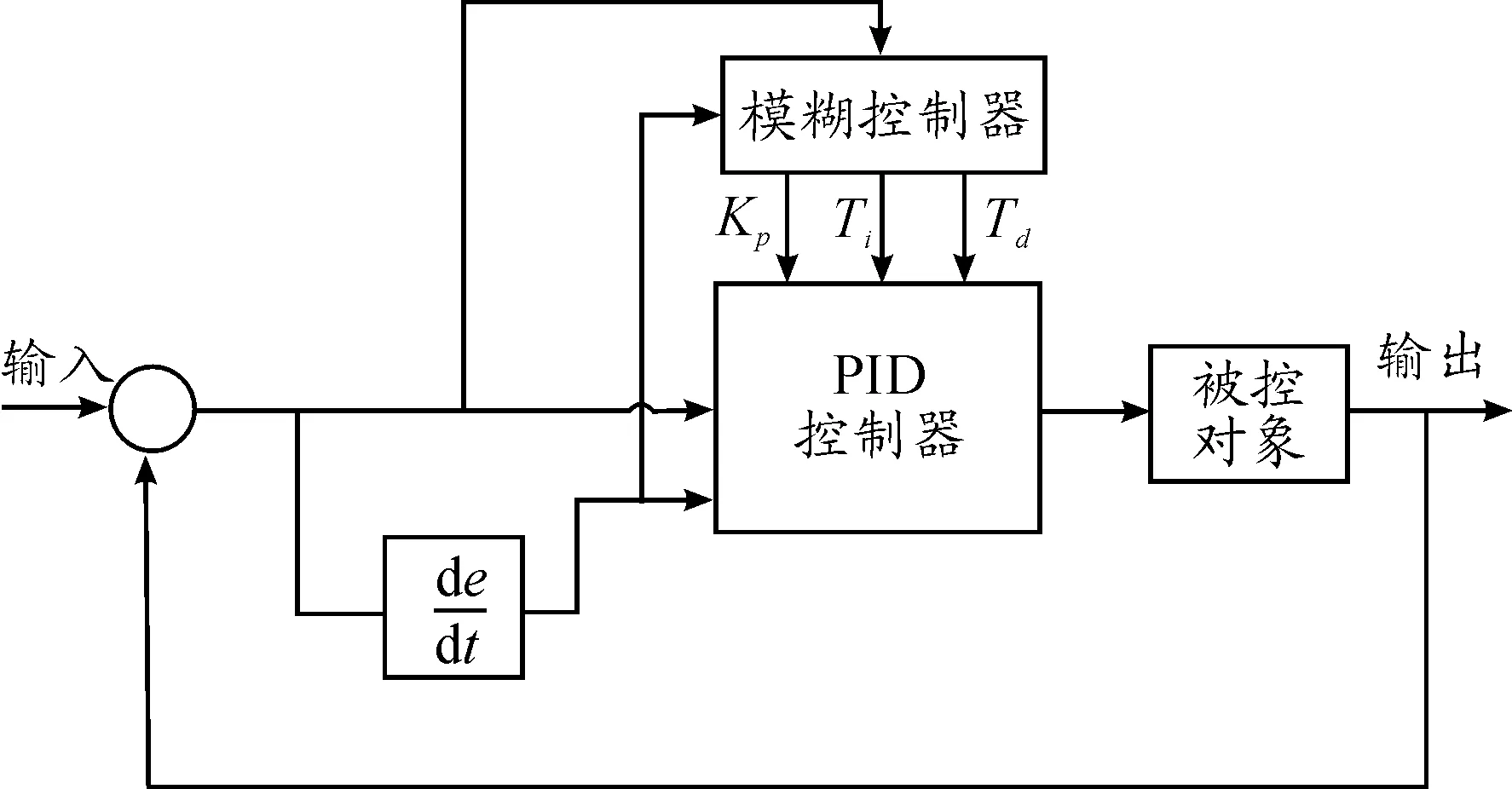
图1 模糊自调整PID控制原理
本文基于Matlab/Simulink建立的模糊自调整PID控制系统,仿真模型如图2所示。该模型由一个两输入三输出模糊控制器和一个PID控制器组成。模糊控制器中的输入量为e和Δe,输出量为ΔKP、ΔTi、ΔTd。其中:e为实际速度和与目标速度的差值;Δe为速度差值变化;ΔKP为比例调节系数增量;ΔTi为积分调节系数增量;ΔTd为微分调节系数增量。如图3所示的PID控制器为模糊自调整PID控制系统的子模型。
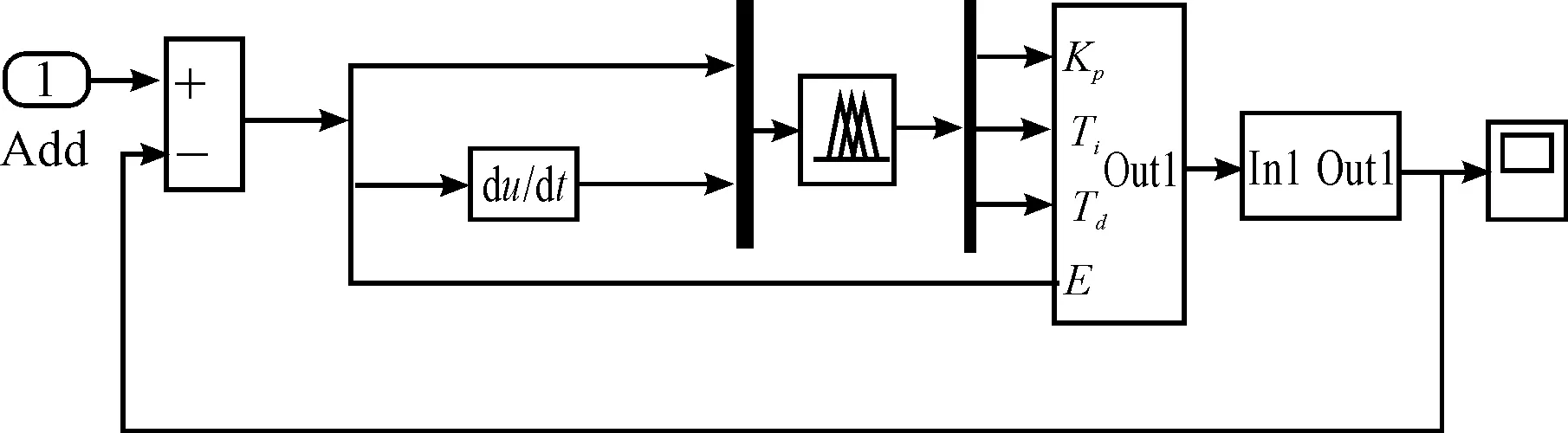
图2 模糊自调整PID控制系统仿真模型
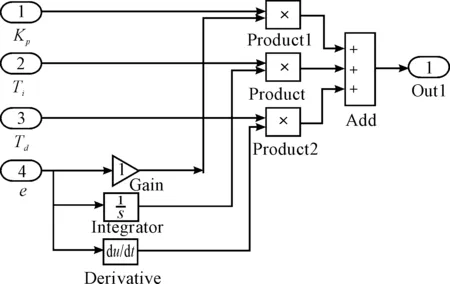
图3 PID控制器仿真子模型
2.1.2 控制规则
该控制系统中的模糊控制器输入和输出变量被分为7个等级,论域分别为[-3,3]。各个语言变量模糊子集的中心和宽度按表1确定。
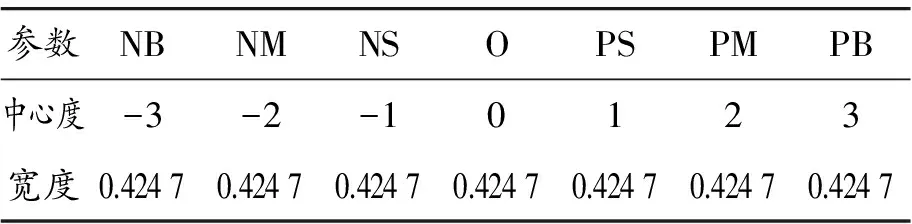
表1 模糊子集中心和宽度值
输入量和输出量的隶属函数均取高斯函数,得到的隶属度函数的图形如图4所示。
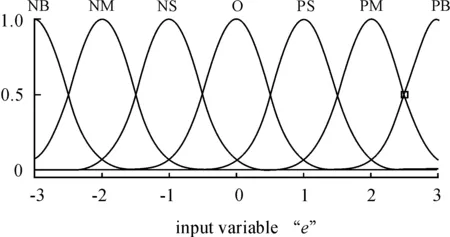
图4 语言变量的隶属度函数图形
根据关于车速偏差e及其变化率Δe与PID 3个参数ΔKP、ΔTi、ΔTd关系的专家经验得出这3个PID控制参数的规则。表2为ΔKP模糊控制规则,表3为ΔTi模糊控制规则表,表4为模糊控制规则。利用模糊控制器,根据输入参数e和Δe进行模糊推理,查询模糊矩阵表进行PID控制参数调整[6-11]。
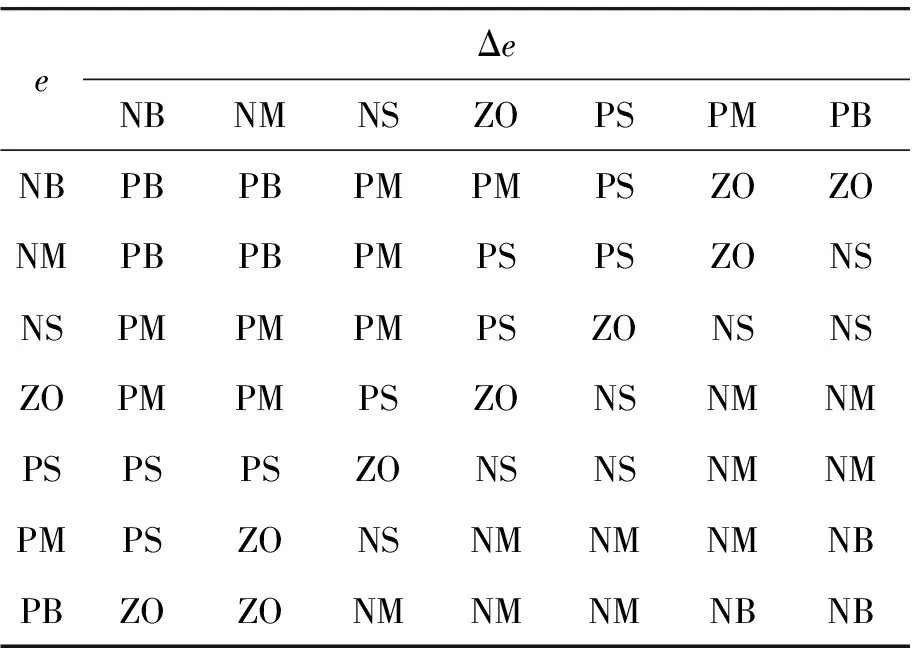
表2 ΔKP模糊控制规则
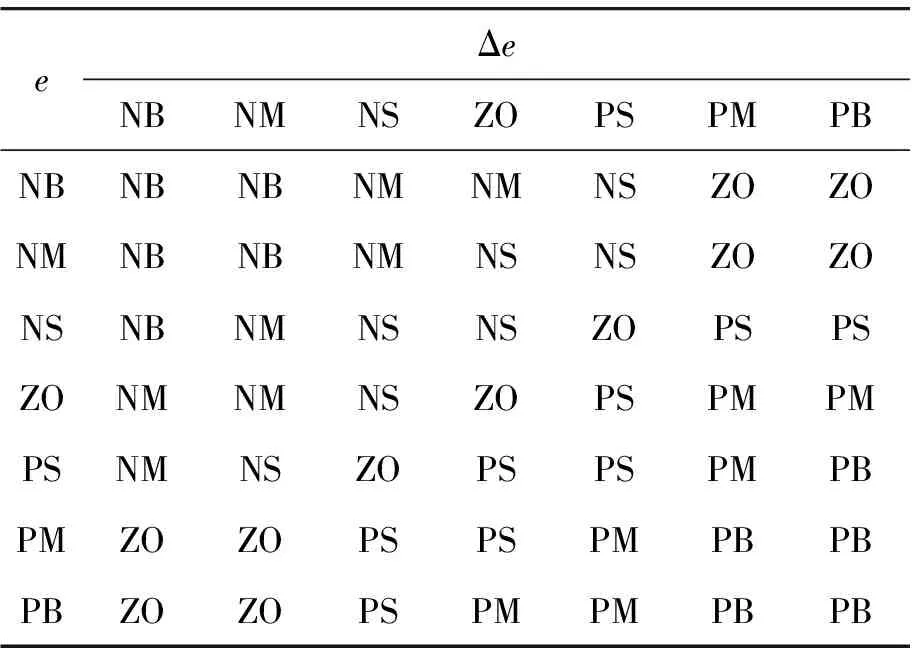
表3 ΔTi模糊控制规则
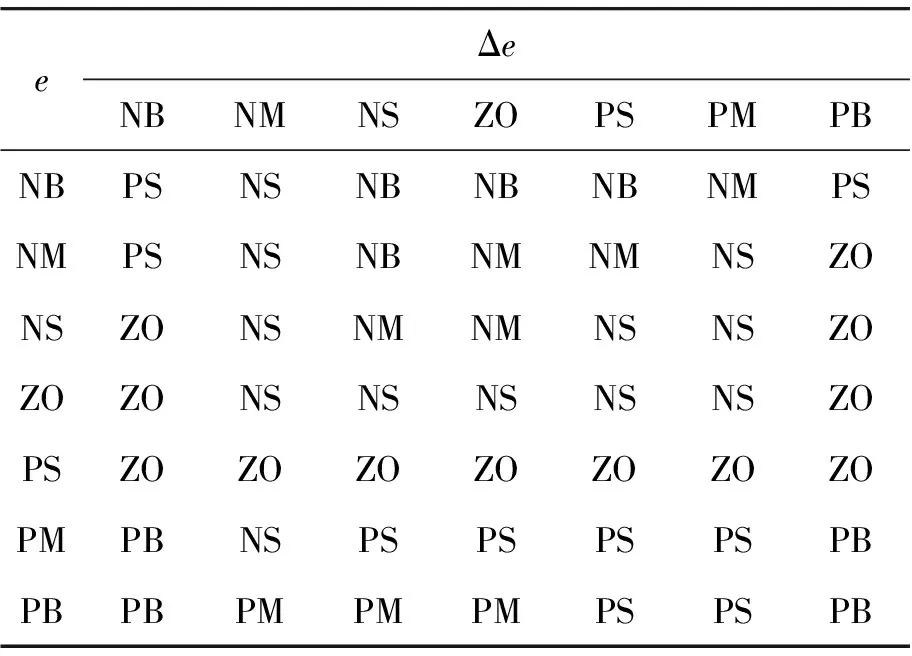
表4 ΔTd模糊控制规则
为识别模糊推理后输出的模糊集合,本文中采用质心法进行去模糊化。
经模糊控制器得出修正参数,分别将ΔKP、ΔTi、ΔTd代入式(1),得出修正参数KP、Ti、Td。
KP=KP+ΔKP
Ti=Ti+ΔTi
Td=Td+ΔTd
(1)
2.2 失效模式
图5为电动拖拉机跛行行车系统结构,驱动系统出现故障或者电池SOC值低于设定值时,电动拖拉机进入失效模式,执行跛行行车控制策略。当出现非严重故障时,执行失效跛行控制;当出现SOC值低于标定值时,执行能量不足跛行控制。在失效模式中,拖拉机工作在限制电池放电电流和电机输出功率及扭矩的模式下,保证能够运行至附近的维修点或者充电站。

图5 跛行行车系统结构
2.2.1 失效跛行行车控制
与电动拖拉机的跛行控制策略相比较,传统燃油拖拉机的跛行行车控制策略较成熟,所以本研究参考传统燃油拖拉机的跛行行车策略[12-13]。当车辆出现非严重故障时,开始启动跛行失效跛行行车控制策略。本研究将非严重故障情况分为以下3种:
1) 当电机出现非严重故障时,采用限制最大的运行功率的处理方式;
2) 当拖拉机驱动系统除电机外的其他部分出现故障时,采用按比例降低运行功率的处理方式;
3) 当加速踏板位置传感器出现故障而导致整车控制器无法得到正确的信号或者电池SOC值低于设定阈值时,采用以固定功率运的处理方式。
2.2.2 能量不足跛行行车控制
图6所示为动力电池端电压与SOC的关系,当动力电池电量不足即电池SOC变低时,电池输出电压变小,根据输出功率近似计算公式P=UI,为保证输出功率不变,需提高放电电流。但是动力电池的放电电流超过限度会使电池严重发热,从而影响电池、整机以及驾驶人员的安全[14]。因此,随电池SOC下降,动力电池输出的最大功率应随之下降。图7所示为本研究得到的动力电池SOC与输出的最大功率关系。

图6 电池端电压与SOC之间的关系
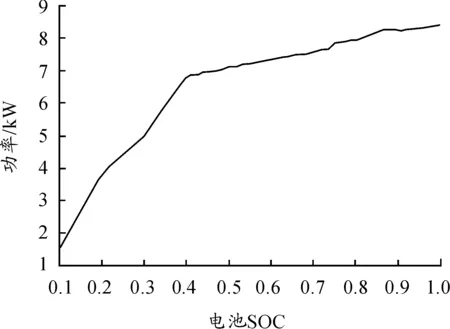
图7 电池提供最大功率与SOC之间的关系
当电池的电量不足时,采用对电压进行分状况控制和限制动力电池放电电流的控制策略。在分阶段控制电压的控制策略中,当电机电压小于警告电压并此过程持续超过 3 min时,提醒警告驾驶员使电动拖拉机脱离犁耕等功率消耗大的作业并及时充电,电机电压小于限制电压并持续超过1 min时,进入跛行行车模式。在电流限制控制策略中,当电池的SOC值低于设定的0.2时,提醒驾驶员使电动拖拉机脱离犁耕等功率消耗大的作业并及时充电,整车控制器进入跛行行车模式。为了防止过电现象的出现,采用分阶段控制电压与电流限制的方法。根据图6所示,电池的端电压与电池的SOC值之间近似地成线性关系,为了简化控制,在两种情况之下本文都采用电流限制控制。
3 仿真及仿真结果分析
3.1 整车控制仿真建模
为验证驱动系统的控制策略,建立了整车控制仿真模型,主要包括驾驶员模型、整车控制模型、电机及其控制模型、电池模型以及驱动系统模型。其中:驱动电机及其控制模型是基于直接转矩控制开发的,电池模型根据厂家提供的参数建立[15-16]。
3.2 测试工况的建立
与电动汽车不同,履带式电动拖拉机除了要完成运输作业及田间转移外,还要完成一系列的田间作业任务,比如耕、耙、旋耕、收货、播种等。因此,本文建立了2种履带式电动拖拉机典型的工况:① 运输作业工况;② 犁耕作业工况。如图8所示,参照低速EUDC测试工况作为履带式电动拖拉机的运输作业工况,此工况的运行时间为200 s,最大车速为7 km/h,平均车速为4.8 km/h,此过程中拖拉机行进的距离为266 m。图9为犁耕测试工况,因为履带式电动拖拉机在进行犁耕作业时,田间路面状况复杂,所受到的牵引阻力会持续变化。因此,本文在建立犁耕测试工况时,以额定牵引力为基准,使牵引阻力在其上下变化,车速保持不变,如图中虚线所示。
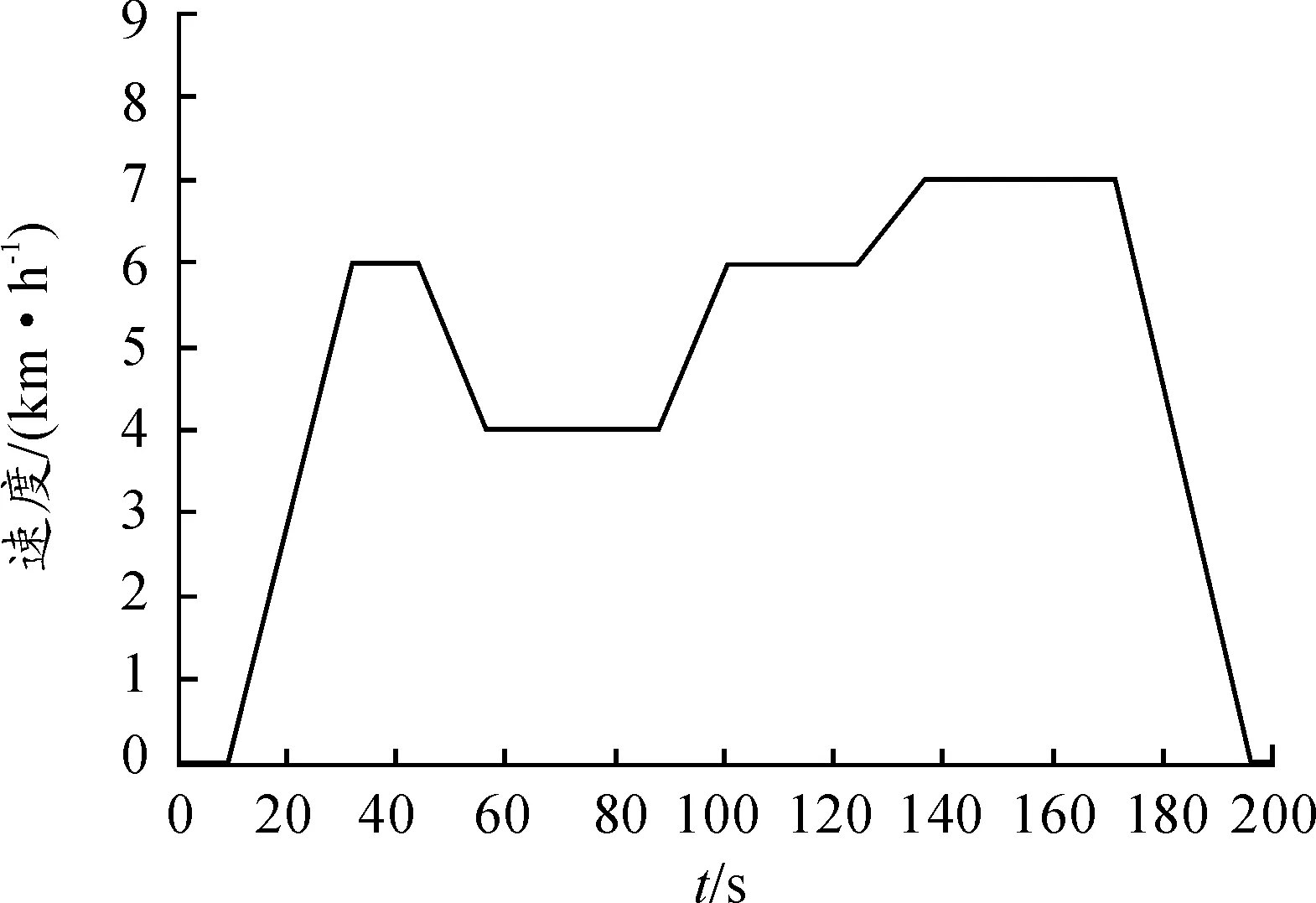
图8 运输作业工况
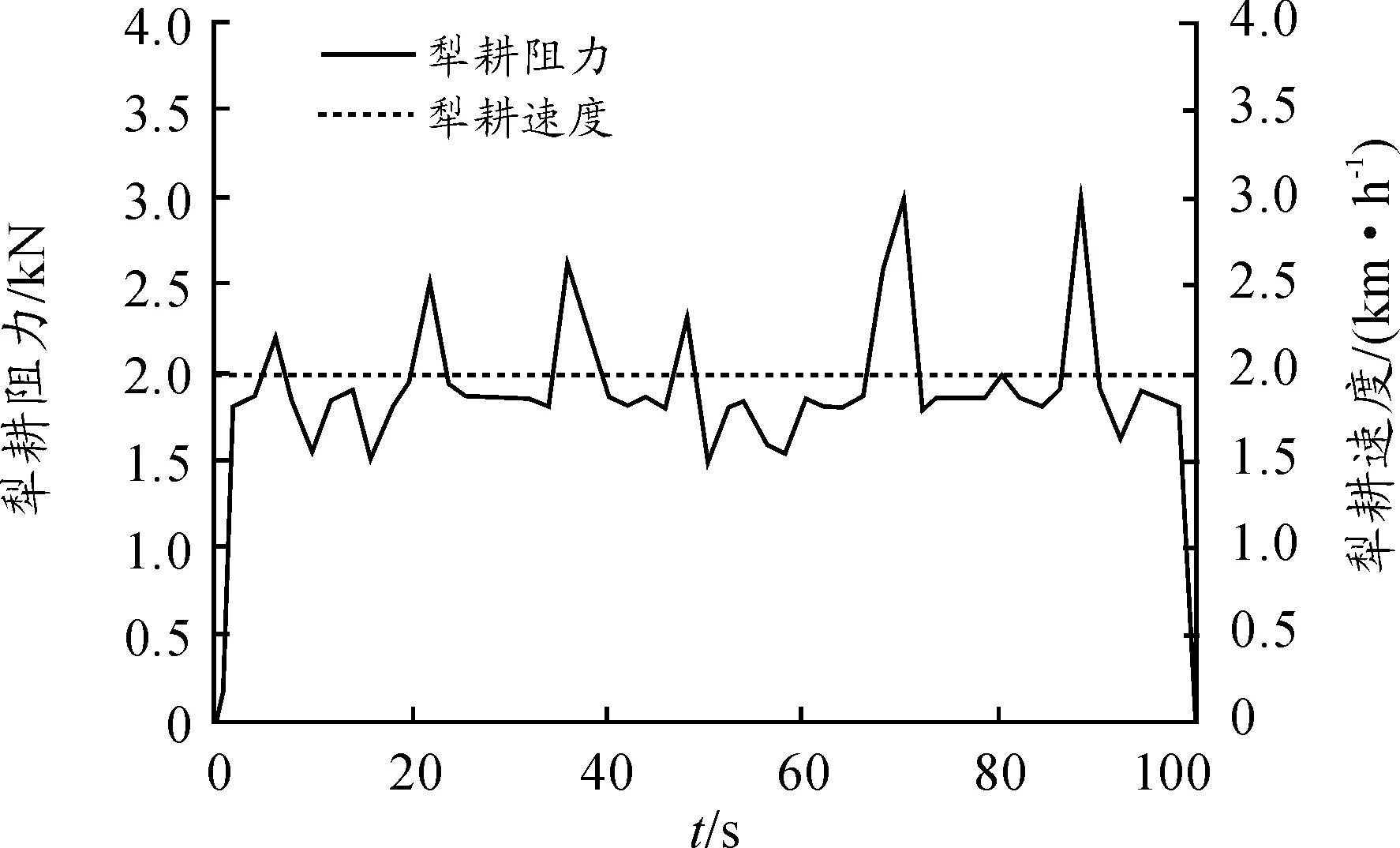
图9 田间犁耕作业测试工况
3.3 履带式电动拖拉机的主要参数
履带式电动拖拉机整车及其传动系统的主要参数如表5所示。

表5 主要部件参数
3.4 运输作业时的仿真结果及分析
以图9所示的运输测试工况作为履带式电动拖拉机仿真系统的输入工况进行仿真,得到的仿真结果如图10所示。
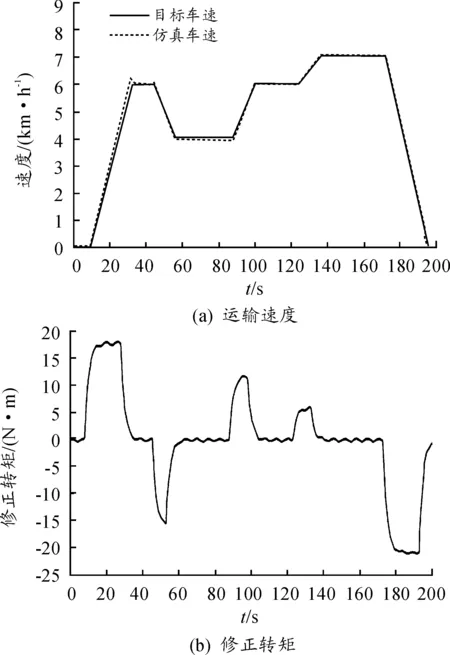
图10 运输工况仿真结果
由速度曲线可以看出:速度偏差很小,仿真速度能很好地跟随目标工况速度的变化,控制摸块工作正常。由修正转矩图可以看出:在加速或减速过程中修正转矩较大,而当车速稳定时,修正转矩基本为0,说明在加速或减速阶段要克服加速阻力,而匀速阶段阻力不变。
3.5 犁耕工况仿真结果及分析
以图10所示的犁耕测试工况作为履带式电动拖拉机仿真系统的输入工况进行仿真,得到的仿真结果如图11所示。
从速度曲线上可以看出:仿真速度能够很好地跟踪目标速度,说明在犁耕工况时模块工作正常。由修正转矩图可以看出:图中曲线的变化趋势与工况牵引阻力的变化趋势保持一致。

图11 犁耕工况仿真结果
3.6 失效模式下跛行行车控制策略仿真
在履带式电动拖拉机发生非严重故障或者电池SOC值低于设定值时,拖拉机会进入跛行回家控制策略,因为非严重故障情况复杂,难以模拟仿真,因此本文只对当电池SOC值低于设定值时进行跛行行车控制策略的仿真。设定进入到跛行行车控制策略的电池SOC的下限值为0.2,仿真结果如图12所示。
由速度曲线可以看出:当车辆进入跛行行车模式,车辆将以一个较低的速度匀速运行,以保证车辆能够跛行回家。由SOC曲线可以看出:当SOC低于0.2时,车辆进入跛行行车模式,此时限制了车辆的转矩输出,使电池的SOC值下降较正常行车模式变得缓慢。根据转矩曲线,当进入跛行行车模式时,电机的输出转矩为某一设定的固定值。综上所述,所建立的跛行行车控制策略在电池电量受到限制时是可行、有效的。

图12 跛行行车仿真结果
4 结束语
在拖拉机力学模型的基础上,根据电动拖拉机的实际工作状况,建立了正常工作模式下的模糊自调整PID控制策略和失效模式下的跛行控制策略。通过仿真结果分析,在正常工作模式下,车速能够很好地跟踪目标车速,特别是在犁耕工况时路面行驶阻力变化大,仍能得到较为理想的控制结果。在跛行行车模式中,进入跛行行车模式之后,车辆的SOC值降低明显变缓,能够达到跛行回家的控制目标。在今后工作中,需要着重研究履带式电动拖拉机起动时的控制策略。
[1] 杨志平.电动农业机械发展现状和趋势分析[J].农业机械,2013(31):103-104.
[2] 混合动力拖拉机试验台设计研究[D].郑州:河南科技大学,2015.
[3] STANISLAV F,DMITRY I,LEV M,et al.Complete traction electric equipment sets of electro-mechanical drive trains for tractors[C]//Computational Technologies in Electrical and Electronics Engineering(SIBIRCON).Listvyanka:IEEE,2011:611-616.
[4] 华梦新.纯电动车整车控制策略的研究[D].哈尔滨:哈尔滨工业大学,2011.
[5] HIROSHI Fujimono,KIYOSHI Fuji,NAOKI Takashi.Vehicle Stability Control of Electric Vehicle with Slip-ratio and Cornering Stiffness Estimation[C]//IESS/ASME internation conference on Advanced intelligent mechatronics.2007:1-6.
[6] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998.
[7] 胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干重要问题[J].自动化学报,2001(4):434-446.
[8] 聂希峰,陆古兵,宋辉.稳压器压力控制系统灰色预测PID控制方法研究[J].兵器装备工程学报,2016,37(5):108-110.
[9] 赵广义,王伟国,李博,等.压电陶瓷迟滞逆模型的前馈PID控制[J].压电与声光,2014,36(6):914-916.
[10] 王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术.2011(01):35-41.
[11] Van LE T.A fuzzy evolutionary approach to constrained optimization problems[C]//Proceedings of the second IEEE Conference on Evolutionary Computation.Perth,1995:274-278.
[12] 罗玉涛,黄向东.并联式混合动力驱动系统的模糊控制与仿真[J].华南理工大学学报(自然科学版),2003,31(8):92-96.
[13] 王保华,罗永革.基于CRUISE的汽车建模与仿真[J].湖北汽车工业学院学报,2005,19(2):5-8.
[14] 盘朝奉,李桂权,陈龙,等.城市循环工况下纯电动汽车动力电池包温度场分析[J].重庆理工大学学报(自然科学),2016(8):6-12.
[15] 韩如成,潘峰,智泽英.直接转矩控制理论及应用[M].北京:电子工业出版社,2012.
[16] 俞光,刘贤兴.基于遗传算法的直流无刷电机控制[J].测控自动化,2012(28):65-69.
(责任编辑刘 舸)
ResearchonControlStrategyofTrackedElectricTractorDriveSystem
SHANG Gaogao, ZHANG Jianzhou, ZHANG Jiajun
(College of Automotive and Traffic Engineering, Jiangsu University, Zhengjiang 212013, China)
A set of control strategy of the whole drive system is designed to improve the working efficiency of the tracked electric tractor. In normal mode, the fuzzy self -adjusting PID control strategy was established. In the failure mode, the limp home control strategy was presented. The control strategies were simulated in Matlab/Simulink. The simulation results showed that the target speed can be track in the transport operation mode. In the plough working mode, the speed fluctuation of the tractor is in the acceptable range, and the torque compensation can track the change of the driving resistance. In the failure mode, the tractor can run at fixed speed, with the battery SOC decreasing slowly.
electric tractor; drive system; control strategies
2016-07-10
江苏省产学研联合创新资金—前瞻性联合研究项目 (BY201306504)
商高高(1962—),男,湖北武汉人,博士,副教授,主要从事机电一体化研究,E-mail:shanggaogao@ujs.edu.cn。
商高高,张建舟,张家俊.履带式电动拖拉机驱动系统控制策略的研究[J].重庆理工大学学报(自然科学),2017(11):32-38.
formatSHANG Gaogao,ZHANG Jianzhou,ZHANG Jiajun.Research on Control Strategy of Tracked Electric Tractor Drive System[J].Journal of Chongqing University of Technology(Natural Science),2017(11):32-38.
10.3969/j.issn.1674-8425(z).2017.11.005
S219.2
A
1674-8425(2017)11-0032-07
猜你喜欢
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
儿童故事画报(2018年4期)2018-05-21
小学生导刊(2017年15期)2017-05-17
汽车与安全(2016年5期)2016-12-01
中国继续医学教育(2015年6期)2016-01-07
黑龙江八一农垦大学学报(2015年2期)2015-12-08
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
中国交通信息化(2014年4期)2014-06-05