基于图像处理的育苗箱环境控制系统
2017-12-06 07:25胡艺聪武付闯
浙江农业学报 2017年11期
李 颀,胡艺聪,武付闯
(陕西科技大学 电气与信息工程学院,陕西 西安 710021)
基于图像处理的育苗箱环境控制系统
李 颀,胡艺聪*,武付闯
(陕西科技大学 电气与信息工程学院,陕西 西安 710021)
针对目前国内育苗过程中存在的设施简陋,占用土地资源多,没有科学的环境调控方法等问题,设计了一种育苗箱环境控制系统,提出了利用图像处理技术对穴盘多株幼苗的茎直径进行同时测定的方法。首先,获取幼苗的长势信息,采用中值滤波方法对图像进行预处理,基于Otsu自动阈值分割法来提取目标区域,通过“叠积木”的方式实现幼苗茎部分割提取。设计以茎直径D和茎直径变化量ΔD为输入的模糊推理系统,模糊推理系统的输出作为温度设定值;温度控制采用PID方法,实现育苗箱内温度的控制。试验结果表明,该系统能够实时地根据幼苗茎的生长情况进行相应的温度调控,提升经济效益,运用科学的种植模式培育优质种苗。
图像处理;茎直径;模糊推理;PID控制
我国是世界第一蔬菜生产大国。蔬菜幼苗期的发育情况将决定其整体质量,因此育苗便成为设施农业中的关键环节。茎直径生长速率可以作为判断幼苗生长期长势的一个重要参数,同时也能作为幼苗是否处于正常生长状态的反馈信息[1-3]。随着计算机及图像处理技术的发展,机器视觉的方法在农业领域,尤其在作物的生理信息提取方面得到了广泛的应用[4]。曾庆斌等[5]提出了基于机器视觉的葡萄茎直径测量方法,但必须将葡萄茎干放入光箱测量,系统缺乏一定的灵活性。杭腾等[6]提出了基于机器视觉的番茄长势信息无损检测的研究,但只能针对单株番茄茎进行测量,无法实现多株番茄植株茎的同时测量。李长缨等[7]利用计算机视觉技术实现对温室植物株高、叶面积等信息的无损监测,并没有实现对植物生长环境的反馈控制。针对作物的环境控制方面,Soldatos等[8]开发了一种非线性反馈及多因子解耦的温室气候控制器,用户一旦设定变量,该控制器即能按照用户的设定执行,完成了温室环境温度湿度的有效控制;Rajaoarisoa等[9]设计了一种自动温室气候最优控制器,通过在实验过程中对控制器设计相关问题的讨论来优化控制器的效果和稳定性;邓璐娟等[10]针对工厂化蔬菜的生产,研制了成套装备和温室的自动控制系统。以上对作物环境控制方面的研究,没有结合作物实际生长情况,忽略了作物的真实需求,不利于作物的生长。本研究提出一种基于图像处理的育苗箱环境控制系统,采用图像处理的方式实时地根据育苗过程中茎的生长状态对育苗箱内整体环境作出调整,结合幼苗的实际生长情况,满足幼苗生长的环境需求,以期通过科学的种植模式提高成苗率,提升经济效益。
1 系统硬件设计

1, 内循环风扇;2,温度传感器;,3,补光灯;4,土壤湿度传感器;5,喷淋设备;6,外循环风扇;7,半导体制冷制热模组;8,穴盘1, Internal circulation fan;2,Temperature sensor;3,LED;4, Soil moisture sensor;5, Spray equipment;6, Outer circulation fan;7, Semiconductor refrigeration heating module;8. Plug图1 育苗箱内部设备构造Fig.1 Nursery box internal equipment structure
整个育苗箱尺寸约为60 cm×60 cm×80 cm,整体结构如图1所示。箱体6面全部覆盖透光性能强的PVC板;箱内底部放置穴盘,用来育苗;箱体中部内置2个温度传感器,实时监测箱内温度;箱内左侧安装补光灯进行补光;箱体后侧安装半导体制冷制热模组与外循环风扇,进行箱内温度的控制与促进箱体内外空气的循环流动;箱内顶部安装内循环风扇,用于箱内温度和湿度的循环流动;箱内中央悬挂喷淋装置,均匀喷淋穴盘内培育的幼苗。箱外顶部放置Uart串口屏,实时显示箱内环境信息和幼苗相关信息如图2所示。控制系统中,光照、土壤湿度等环境参数是利用定时器设置补光灯、喷淋装置的开启与关闭时间进行调控的。
控制器采用树莓派(Raspberry Pi),树莓派分别连接继电器模组、温度传感器、土壤湿度传感器、时钟模块和Uart串口屏;继电器模组、半导体制冷制热模组、内外循环风机、喷淋设备以及补光灯相互连接,育苗箱硬件连接如图3所示。树莓派采用的是3代B型,树莓派的处理器为主频1.2 GHz四核Broadcom BCM2837 64位处理器。温度传感器采用DHT22使用单总线数字信号通信,通过I2C接口将采集温度数据实时传送给树莓派。土壤湿度传感器采用YL-69,直接插在土壤中,以数字信号的方式将湿度信息传送给树莓派。树莓派没有板载时钟(RTC),因此添加时钟模块DS1302,树莓派通过I2C接口从RTC中读取出里面存储的时间,Uart串口屏通过USB2.0接口采用Uart串口通信。半导体制冷制热模组的功率为360 W。
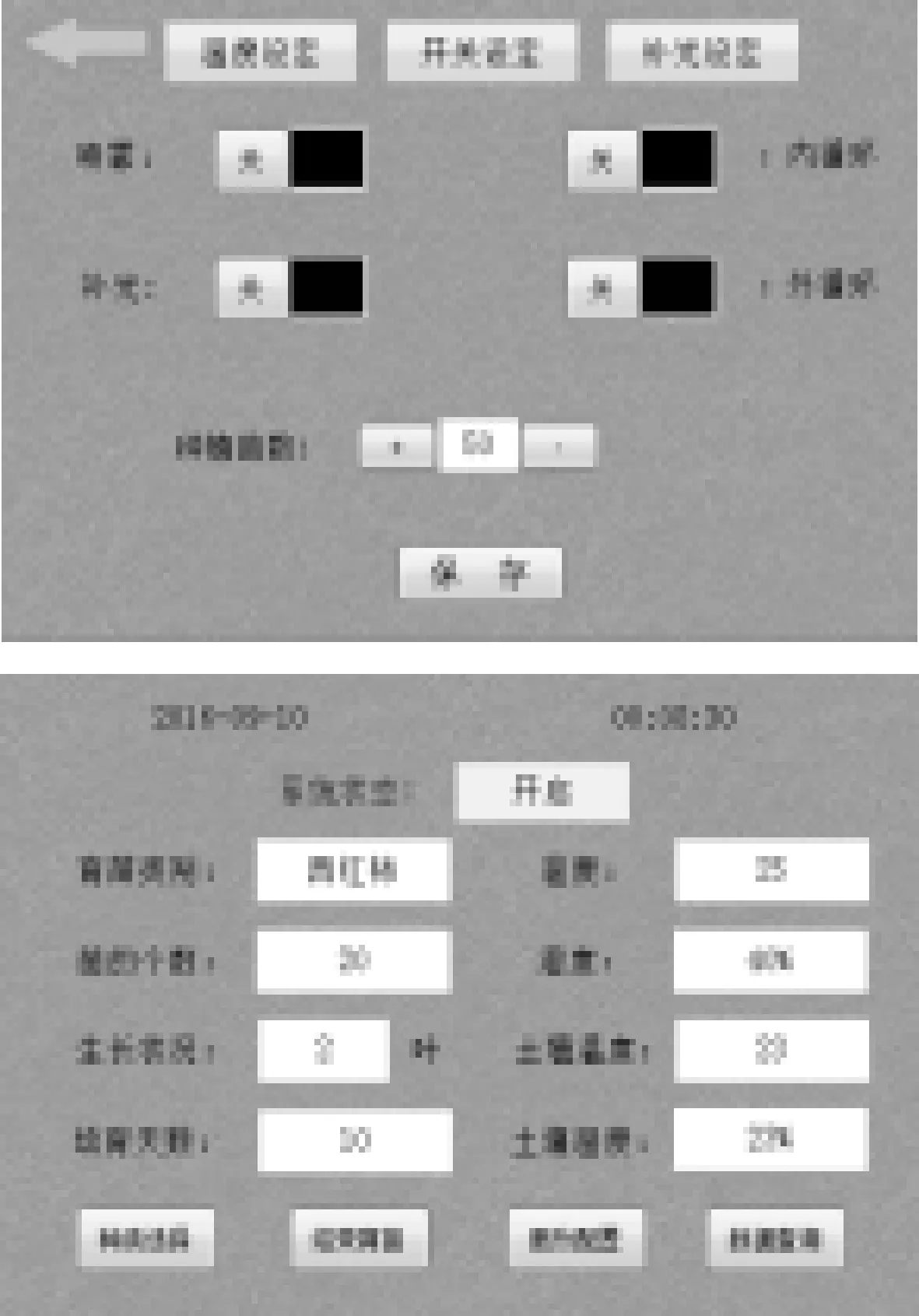
图2 Uart串口屏显示Fig.2 Uart serial screen display

图3 育苗箱硬件连接示意图Fig.3 Nursery box hardware connection diagram
2 基于图像处理的茎直径测量
以番茄育苗过程为主要研究对象,为实现番茄幼苗茎部像素平均值的测量,首先应将幼苗茎部分从整幅幼苗图像中提取出来,主要分为两个步骤,即实现幼苗与穴盘的分离和幼苗的茎与叶的分离。此外,还须对图像的像素进行标定。算法在Visual Studio2010环境下进行了编程实现,对幼苗生长过程中拍摄的照片进行了测试,测量茎直径的流程如图4所示。
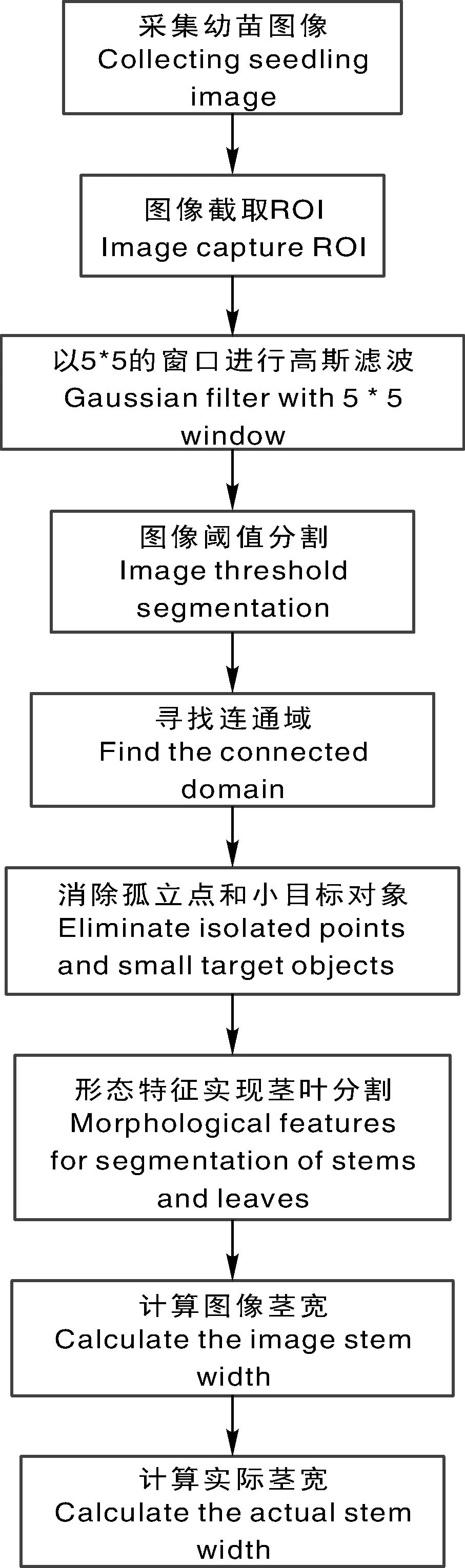
图4 图像处理测量茎直径的流程图Fig.4 Flowchart of image processing measuring stem diameter
2.1 幼苗图像预处理
图像采集后,必须对图像进行预处理,消除干扰,突出幼苗茎部信息,为后期的茎宽测量打好基础。对图像的预处理主要包括提取图像ROI(region of interest)、转灰度图、高斯滤波等几部分。由于镜头架设的位置固定,即穴盘在图像中的位置是固定的,所以通过对图像进行ROI可以有效地实现幼苗和穴盘的分离。图像灰度化后,本文采用5×5的模板来完成幼苗图像的高斯滤波。幼苗预处理后的图像如图5-b所示。
2.2 幼苗图像阈值分割
本文采用Otsu法进行幼苗图像的阈值分割,Otsu算法是无参量的一种自适应阈值选取法,其首先确定整幅图像的灰度,再利用灰度关系选取一个临时阈值,然后对阈值两边的区域求灰度的方差值,遍历整个灰度值之后,选取最大方差值的灰度值便是所要求取的图像分割的阈值。阈值分割以后,即实现对小目标对象的去除操作,使实际测量更有价值。首先寻找连通区域,完成小目标对象的去除操作后进行图像的重绘,重绘后的效果图如图5-c,d所示。
2.3 幼苗图像的茎叶分离
幼苗叶片部分较宽,所占面积大,而茎部较窄,因此可以利用形态特征来进行幼苗的茎叶分离操作。提出了以一种“叠积木”的方式实现幼苗茎部分割提取,具体方法如下:
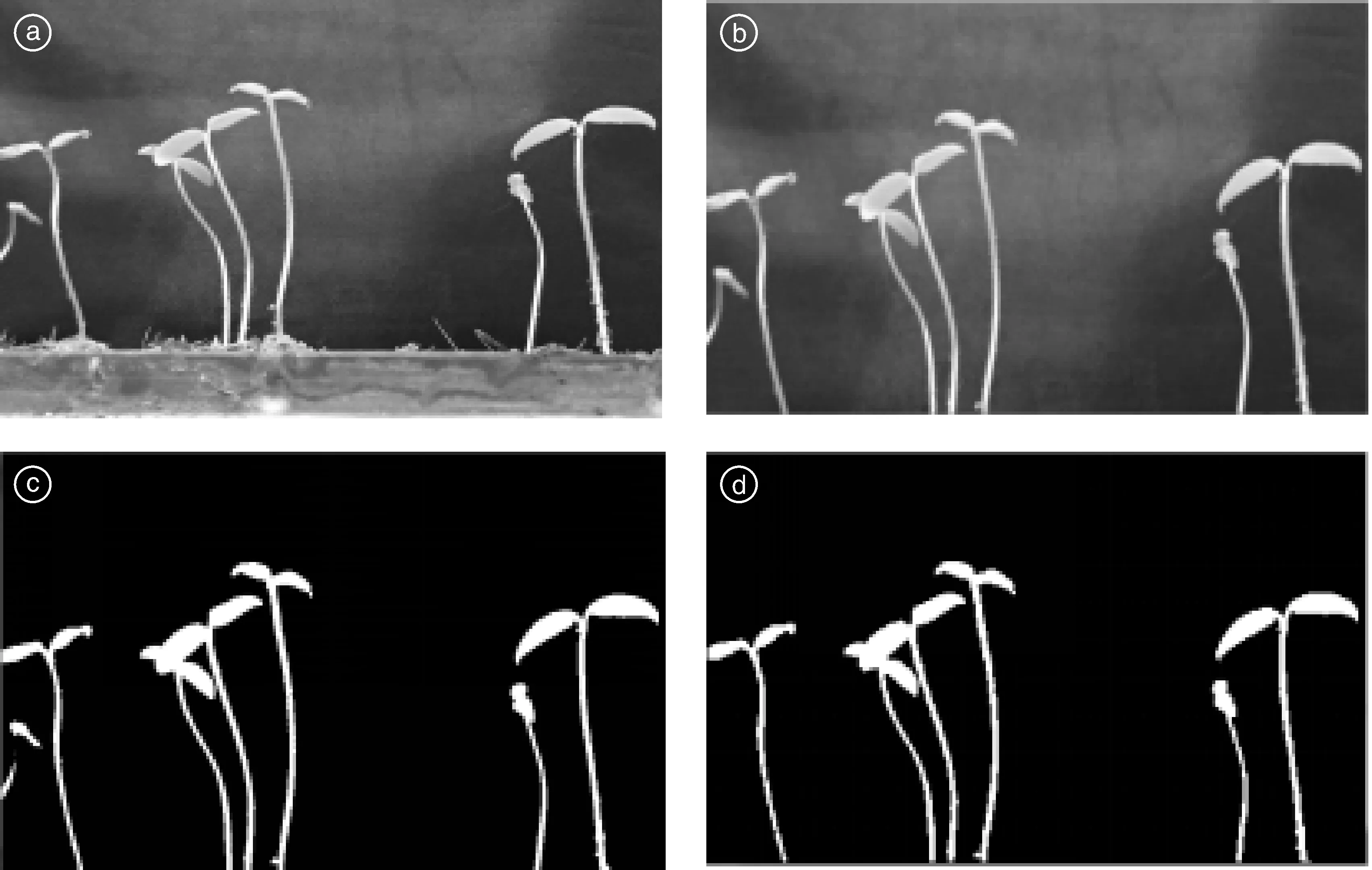
a, 生长图像; b,预处理后图像;c, 阈值分割图;d,去除小目标对象效果图a, Seedling growth image; b, Seedling growth image after pretreatment; c, Seedling threshold segmentation; d, Removal of small target object rendering图5 幼苗图像的预处理、阈值分割及去除小目标对象效果图Fig.5 The seedling images after treatment, threshold segmentation and removal of small target object rendering
1)标记幼苗图像中的各个连通域(即标记图中的各个幼苗茎)(图6);
2)定义“积木”为图像某连通域中的一行,进行“叠积木”过程,即将幼苗茎看作是由无数块小的“积木”叠加而成的;
3)进行扫描,获取各个“积木”的起点和终点位置,判断此“积木”属于哪个连通域(图7);
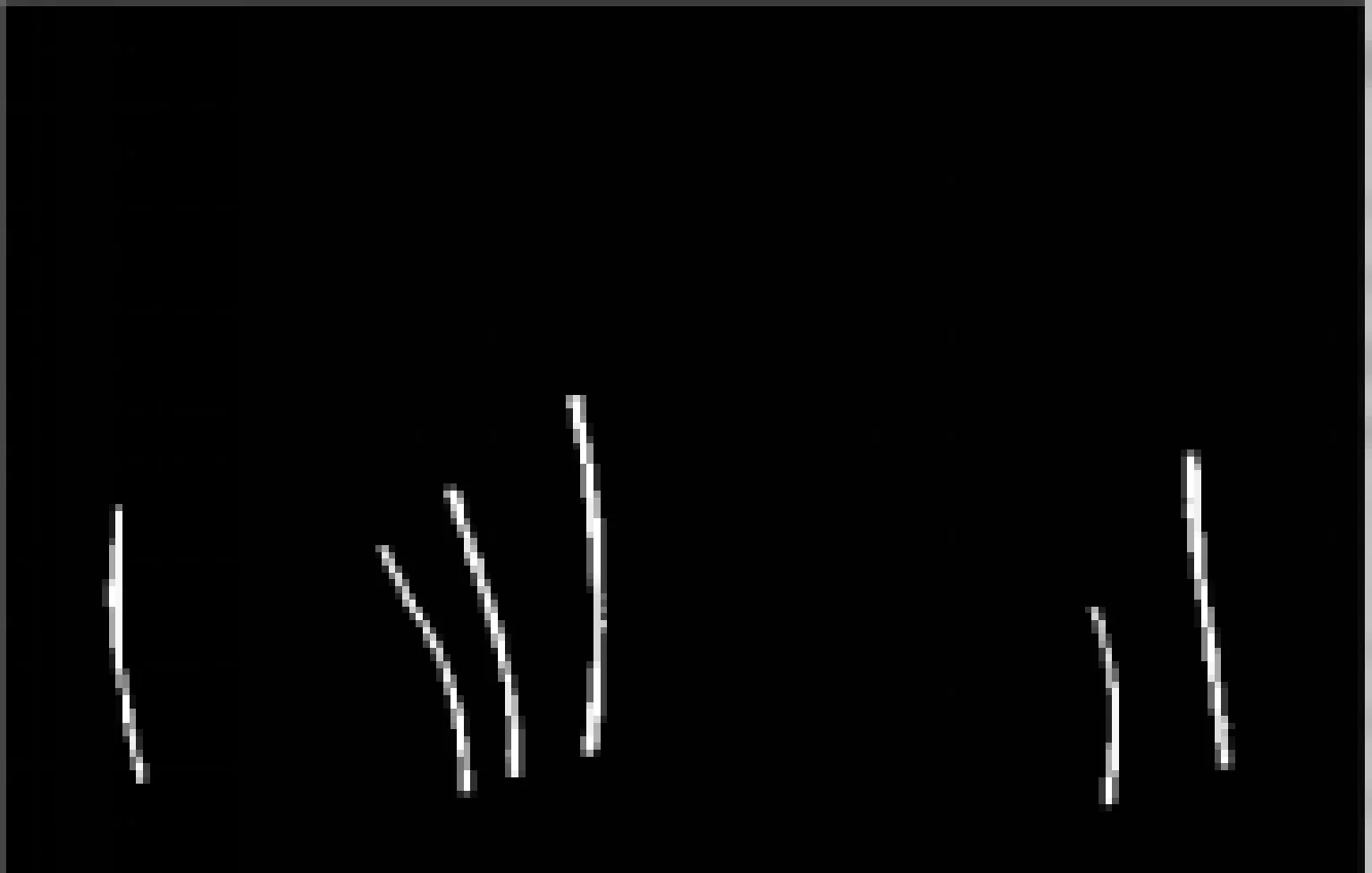
图6 幼苗茎部分割二值图Fig.6 Seedling stem segmentation binary graph

图7 茎部检测结果示意图Fig.7 Schematic diagram of stem detection
4)遍历过程中判断是否到达“临界区”(即定义为出现的新“积木”的宽度大于以往一个“积木”宽度的3倍);
5)一个连通域中每个“积木”起点到终点的距离求和除以总的“积木”个数求得的平均值即为一株幼苗的茎宽像素平均值;
6)依次循环各个连通域,得到图像中每株幼苗茎宽的像素平均值。
2.4幼苗茎部图像像素的标定
标定的内容即图像中的一个像素所代表的实际宽度δ,因此它的单位是mm·pix-1。像素的标定方法较多,综合考虑精度与可行性的要求,本文所采用的方法是在需要被摄取的幼苗放置标定板,标定板上张贴一标准宽度的白色纸条,标定的具体实施方法如图8所示。纸条的标准宽度除以像素点个数即得到一个像素所代表的宽度。图像处理方法与实际测量方法所得的茎直径比较结果见表1。
3 模糊推理系统的设计
由于目前国内外研究人员通过对作物的生长分析建立了作物生长模型,从而控制作物生长每一阶段的环境参数,但大多模型的建立都较为复杂,实用性欠佳[11-12]。因此,提出模糊推理控制的方法来调控育苗箱内温度,可以有效解决幼苗生长过程中模型不确定的问题。模糊推理系统的输入量是茎直径D和茎直径变化量ΔD,模糊推理系统的输出量作为温度设定值。输入的茎直径及茎直径变化量由图像处理单元获得,由于输出要求精确量,所以系统最后还要进行解模糊,得到精确的输出量来控制执行机构(半导体制冷制热模组)。本研究所建立的模糊推理过程框图如图9所示。
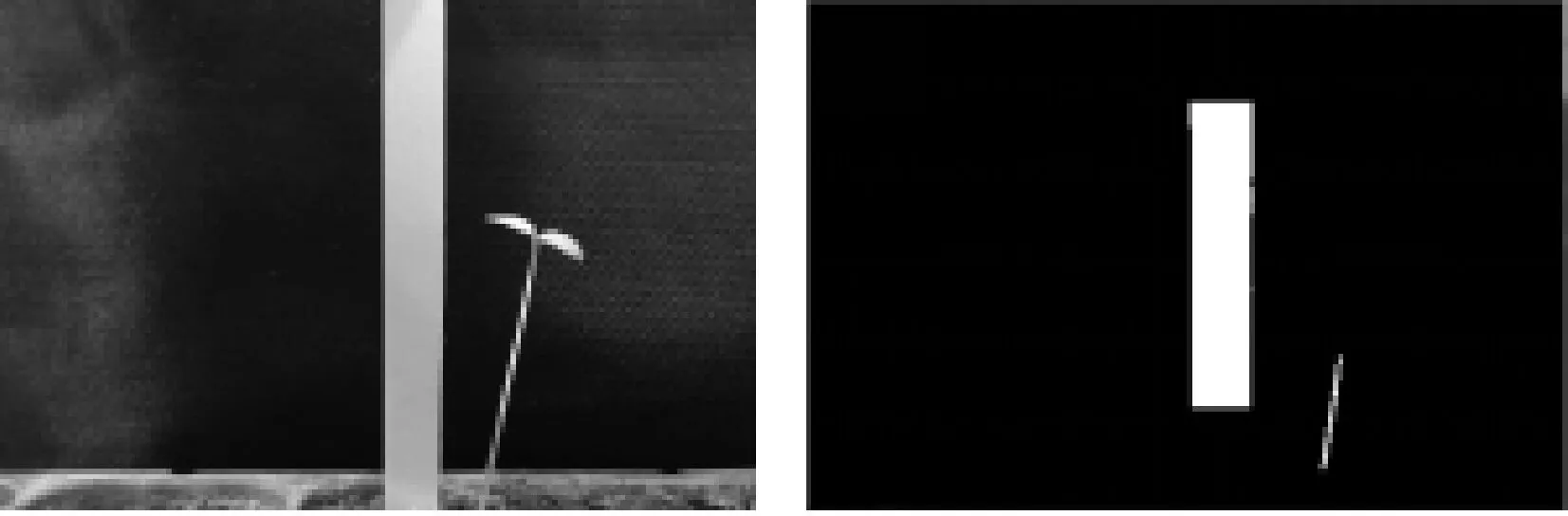
图8 幼苗标定方法示意图Fig.8 Schematic diagram of seedling calibration method
表1两种方法测得幼苗茎直径比较
Table1Comparison of two methods of measuring the stem diameter of seedlings
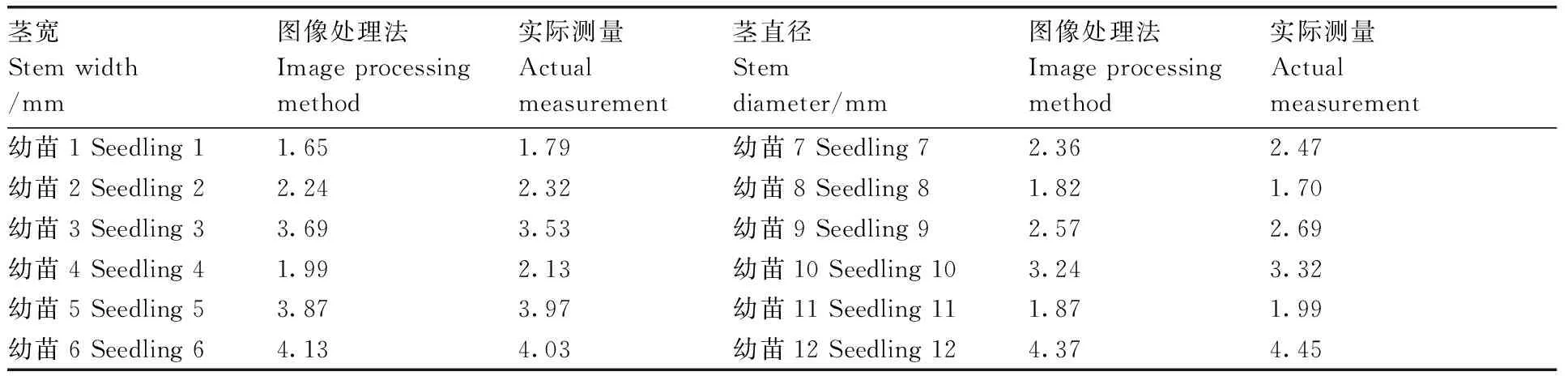
茎宽Stemwidth/mm图像处理法Imageprocessingmethod实际测量Actualmeasurement茎直径Stemdiameter/mm图像处理法Imageprocessingmethod实际测量Actualmeasurement幼苗1Seedling11.651.79幼苗7Seedling72.362.47幼苗2Seedling22.242.32幼苗8Seedling81.821.70幼苗3Seedling33.693.53幼苗9Seedling92.572.69幼苗4Seedling41.992.13幼苗10Seedling103.243.32幼苗5Seedling53.873.97幼苗11Seedling111.871.99幼苗6Seedling64.134.03幼苗12Seedling124.374.45
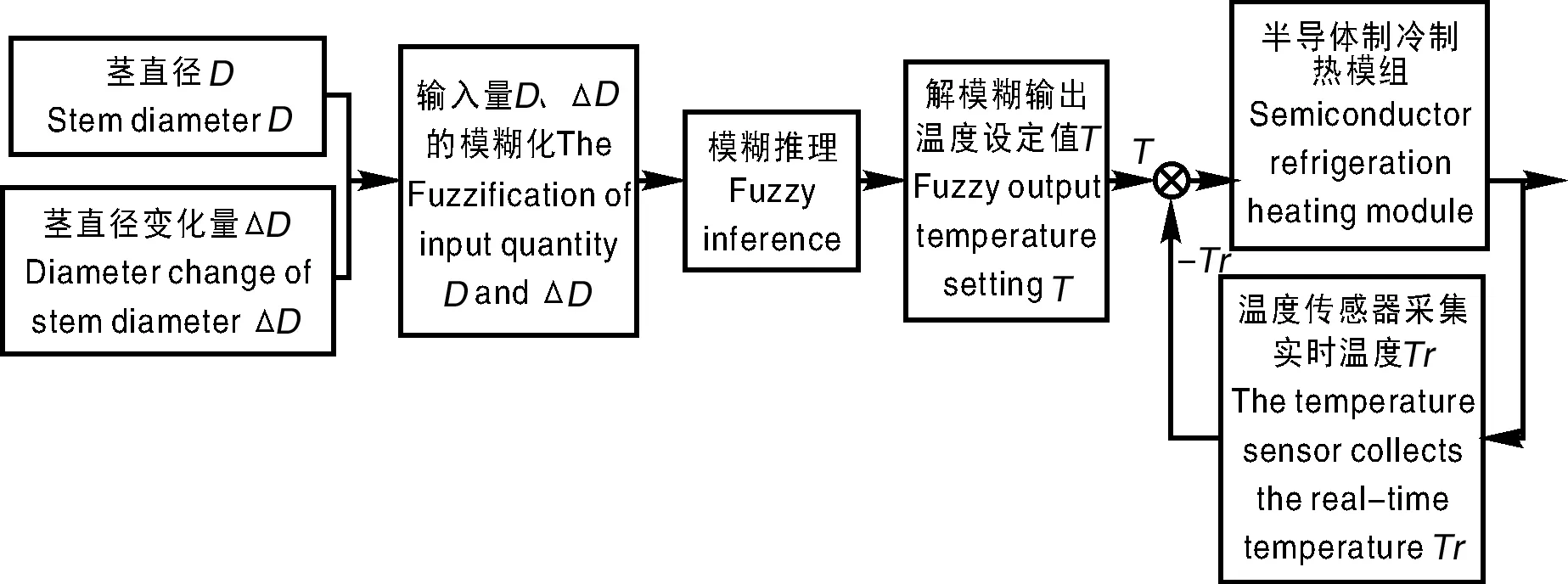
图9 模糊推理过程框图Fig.9 Block diagram of fuzzy inference
3.1输入输出变量的变化论域
本模糊推理系统每隔6 h监测一次番茄幼苗茎直径值,通过300组实验累计数据观察,当幼苗的茎直径大于4.5 mm时可以考虑移栽,因此取幼苗茎宽的变化范围是[0.5 mm,4.5 mm],同时培育番茄幼苗适宜的日温范围为20~30 ℃[13],输入输出变量的变化论域见表2。
由于昼夜温差也会对幼苗的发育产生显著的影响,因此在培育过程中需保持一定的昼夜温差,以有利于幼苗的生长发育和品质。番茄幼苗生长发育的适宜夜温在18 ℃左右[13]。因此,将育苗箱内夜温设置为18 ℃,昼温以模糊推理系统输出的温度设定值进行调整;昼夜时间段的划分是通过树莓派读取DS1302时钟模块存储的时间编程实现(昼夜时间段划分分别为7:00—18:00、19:00—次日6:00)。
表2输入输出变量的变化论域
Table2Change field of input and output variables

输入输出变量Inputandoutputvariables茎直径Stemdiameter/mm茎直径变化量Diameterchangeofstemdiameter/mm温度设定值Temperaturesetpoint/℃最小值Minimumvalue0.5020最大值Maximumvalue4.50.130
3.2 输入输出变量的隶属度矢量值
隶属度函数的选择对模糊推理系统的性能影响较大。为了推理简单,本系统选用三角形隶属度函数,输入、输出变量的模糊隶属度矢量值见表3、表4、表5。
3.3 模糊规则及模糊控制表
本研究所设计的模糊推理系统是双输入、单输出的模糊推理系统。为使推理结果准确,把茎直径D划分为7个语言变量,茎直径变化量ΔD划分为6个语言变量,输出变量温度设定值划分为6个语言变量。因此,该模糊推理系统共有42条规则。
表3茎直径D的隶属度矢量值
Table3Stem diameterDmembership value vector value

D等级Degree0.51.01.52.02.53.03.54.04.5NB0.51.00.50NM00.51.00.50NS00.51.00.50ZO00.51.00.50PS00.51.00.50PM00.51.00.50PB00.51.00.5
表4茎直径变化量ΔD的隶属度矢量值
Table4Stem diameter change amount ΔDmembership value vector value
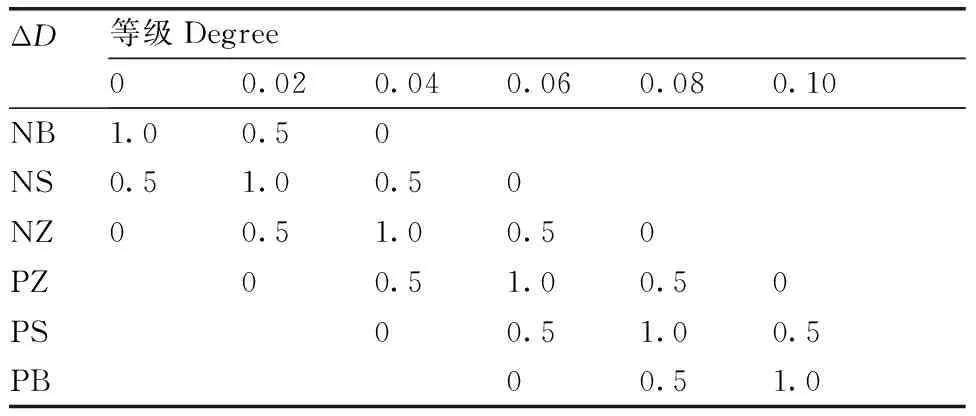
ΔD等级Degree00.020.040.060.080.10NB1.00.50NS0.51.00.50NZ00.51.00.50PZ00.51.00.50PS00.51.00.5PB00.51.0
表5温度设定值的隶属度矢量值
Table5Temperature setpoint membership value vector value
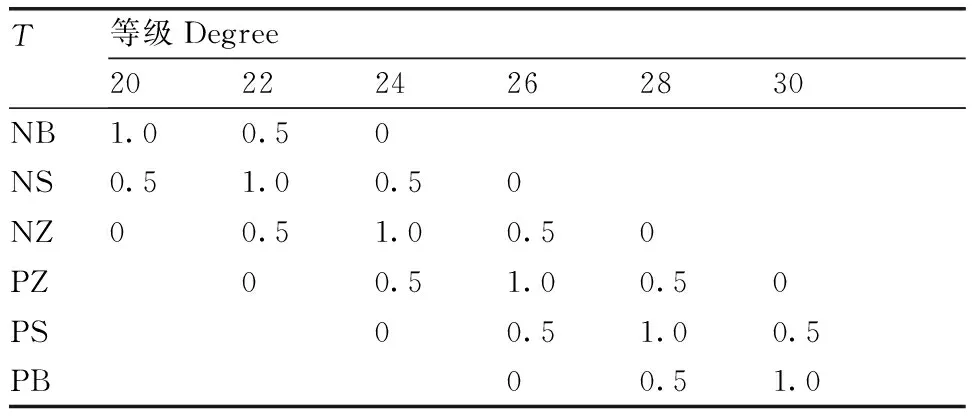
T等级Degree202224262830NB1.00.50NS0.51.00.50NZ00.51.00.50PZ00.51.00.50PS00.51.00.5PB00.51.0
举例来说,如果茎直径D为负大,茎直径变化量ΔD为负大,则应尽量提高温度,如果茎直径D为负大,茎直径变化量ΔD为正小,则需要适当降低温度,相应的控制规则为:
If (D=NB) and (ΔD=NB) then (T=PB)
If (D=NB) and (ΔD=PS) then (T=NS)
同理,通过实验数据以及种植经验得到模糊控制规则,见表6。
3.4 解模糊
模糊决策中模糊交运算(AND)采用最小化(MIN)方法,模糊或运算(OR)采用最大化(MAX)方法。由于控制器(制冷制热模组)需要获得精确物理量,即温度设定值,所以要进行解模糊。解模糊方法采用重心法,该方法是取隶属度函数曲线与横坐标围成面积的重心为模糊推理的最终输出值,即:
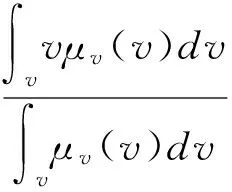
(1)
表6模糊控制规则
Table6Fuzzy control rules
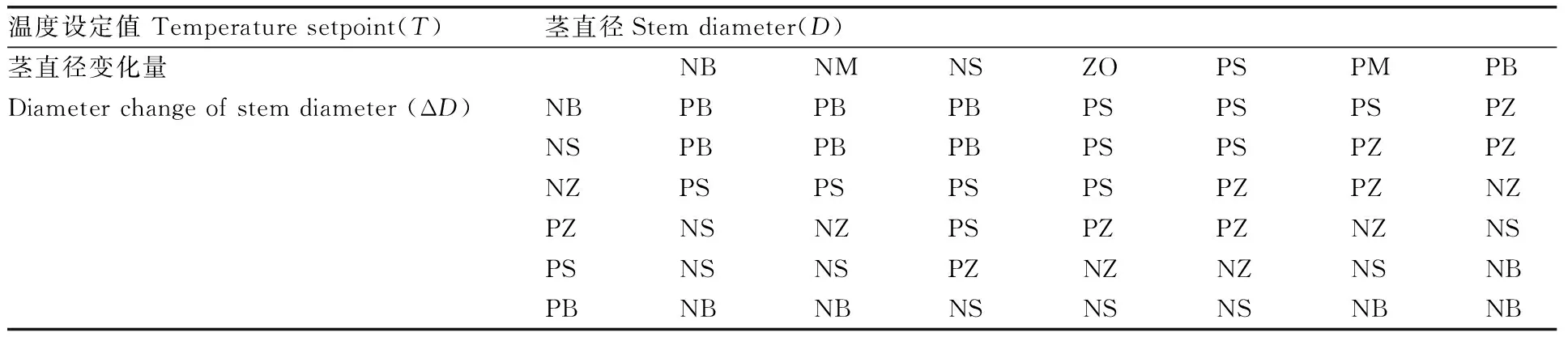
温度设定值Temperaturesetpoint(T)茎直径Stemdiameter(D)茎直径变化量NBNMNSZOPSPMPBDiameterchangeofstemdiameter(ΔD)NBPBPBPBPSPSPSPZNSPBPBPBPSPSPZPZNZPSPSPSPSPZPZNZPZNSNZPSPZPZNZNSPSNSNSPZNZNZNSNBPBNBNBNSNSNSNBNB
解模糊控制规则三维图如图10所示:
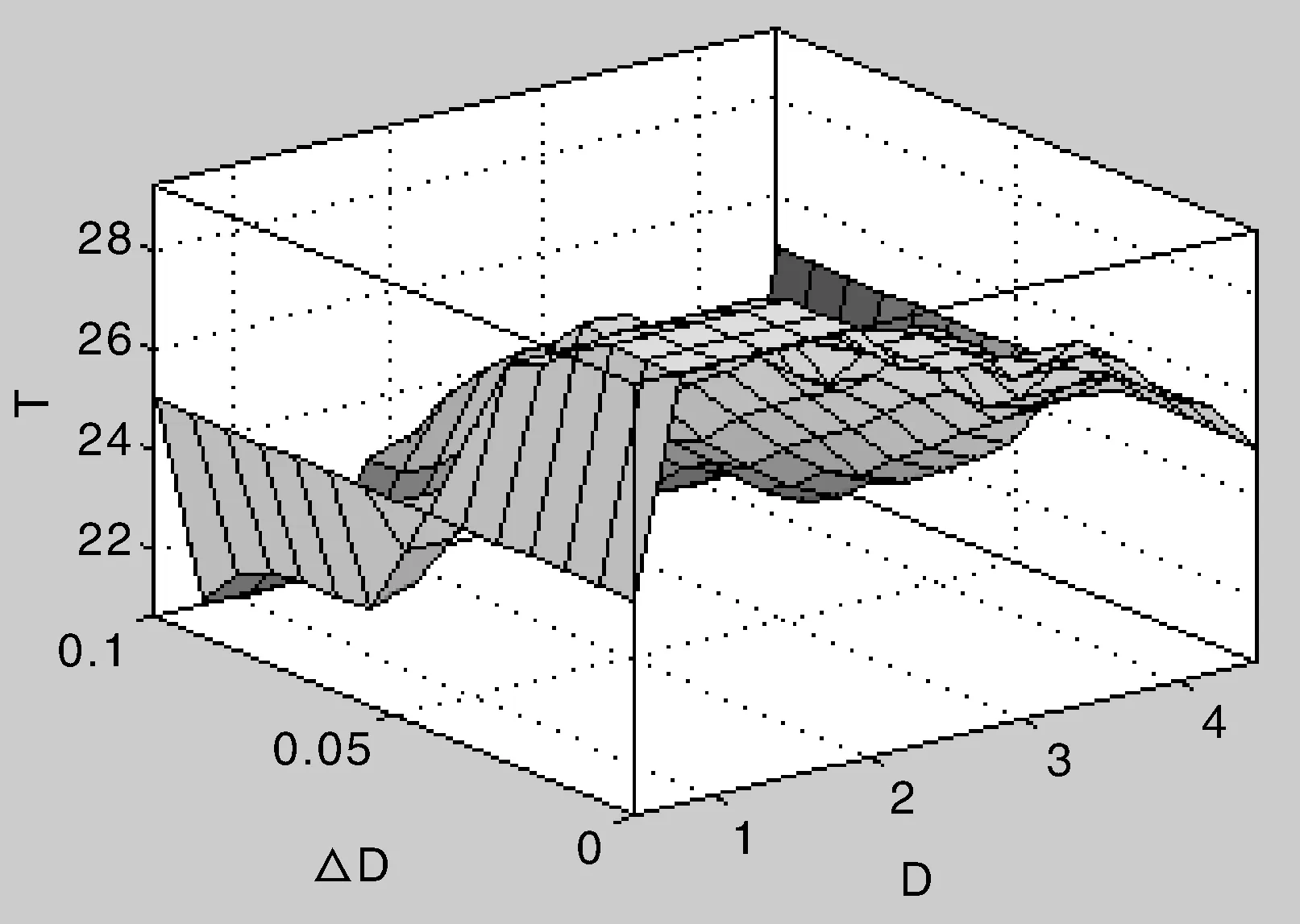
图10 模糊控制规则三维图Fig.10 Fuzzy control rules 3D graphs
4 温度的PID控制及仿真实验
PID控制器是将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。在温度控制系统中将温度传感器实时采集的温度值与模糊推理系统输出的温度设定值比较,差值作为PID功能块的输入。PID控制系统原理框图如图11所示。
温度控制采用制冷/制热片作为控制对象,温度的传递函数可以表示为:
(2)
式中:k为静态增益;T为时间常数;τ为滞后时间。
这里选取温度的传递函数为:
(3)
在MATLAB R2013b的Simulink环境下,搭建如图12所示的仿真模型:
具体参数设置如下:PID的初始参数Kp=0.53,Ki=0.058,Kd=0.653,系统的仿真结果如图13所示。
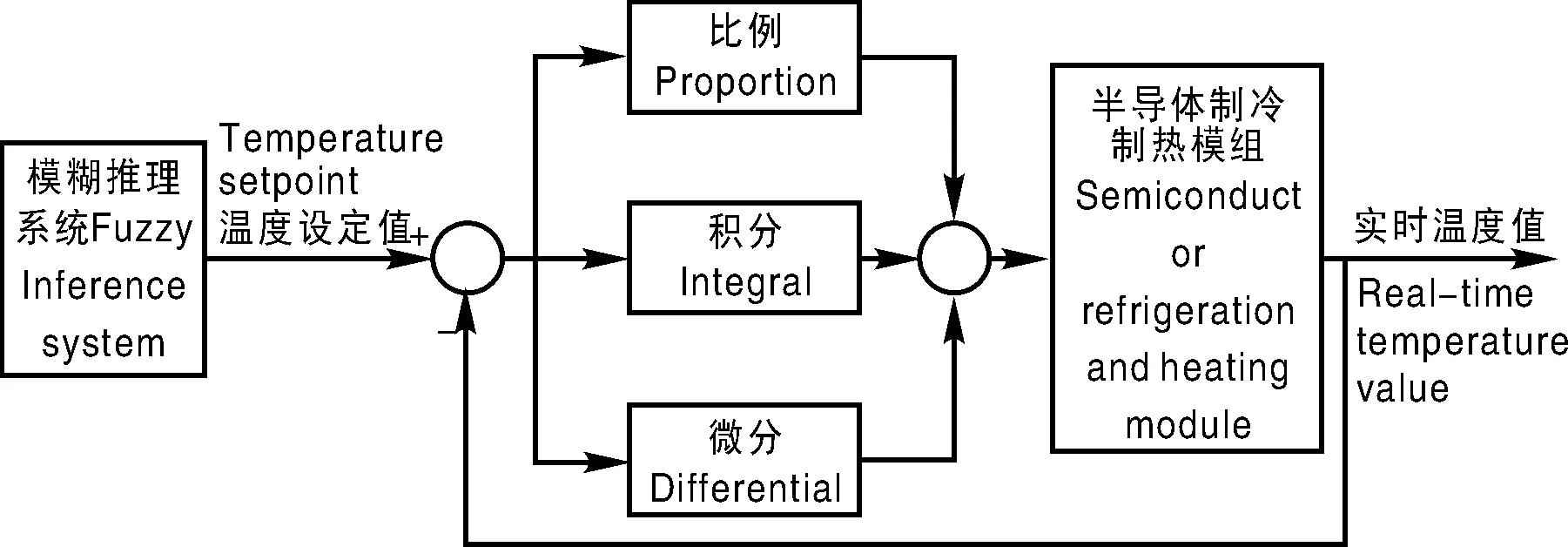
图11 PID控制系统原理框图Fig.11 Block diagram of PID control system
5 结果与分析
从图14中可看出,相对于传统蔬菜培育方式,本文的环境控制系统取得的效果更优,相同一段时间内,茎直径的变化量更大,仔细分析可得到如下结论:相对于传统温室环境控制中温度一经设定一成不变的缺点,本文环境控制系统可以根据幼苗的实时生长状态灵活调控育苗温度;相对于以往蔬菜育苗受季节限制的特点,本文环境控制系统可一定程度解除季节限制的制约条件;以上试验结果证明了本系统检测结果准确、控制效果良好,具有一定的可行性和实用价值。

图12 PID仿真结构框图Fig.12 Block diagram of PID simulation

图13 PID控制仿真结果图Fig.13 Simulation results of PID control
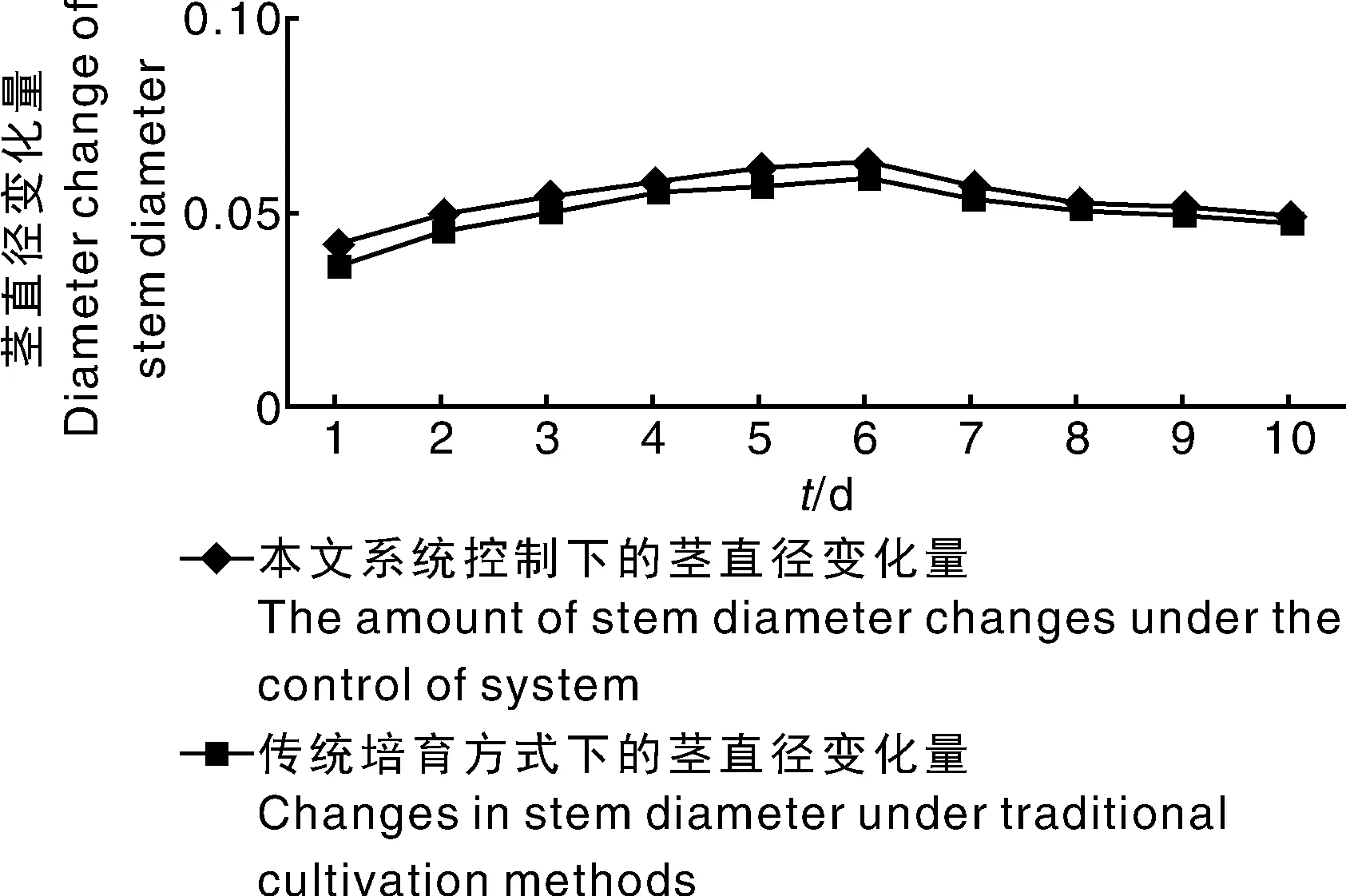
图14 本文控制系统与传统培育方式结果比较Fig.14 Comparison on the results of the control system with the traditional cultivation methods
[1] 卢白娥. 我国蔬菜生产现状与育苗问题探讨[J]. 现代农业科技, 2008 (23):126.
LU B E. China’s vegetable production status and nursery problems[J].ModernAgriculturalScienceandTechnology, 2008 (23): 126.(in Chinese)
[2] 孟兆江, 段爱旺, 刘祖贵, 等. 根据植株茎直径变化诊断作物水分状况研究进展[J]. 农业工程学报, 2005, 21(2):30-33.
MENG Z J, DUAN A W, LIU Z G, et al. Advances on diagnosis of crop moisture content from changes in stem diameters of plants[J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2005, 21 (2): 30-33.(in Chinese with English abstract)
[3] 王晓森, 孟兆江, 段爱旺,等. 基于茎直径变化监测番茄水分状况的机理与方法[J]. 农业工程学报, 2010, 26(12):107-113.
WANG X S, MENG Z J, DUAN A W, et al. Mechanism and methodology for monitoring tomato water content based on stem diameter variation[J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2010, 26(12):107-113. (in Chinese with English abstract)
[4] 孙红, 孙明, 王一鸣. 植物生长机器视觉无损测量研究综述[J]. 农业机械学报, 2006, 37(10):181-185.
SUN H, SUN M, WANG Y M, et al. Status and trend of research on non-destructive measurement of plant growth based on machine vision[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2006, 37(10): 181-185. (in Chinese with English abstract)
[5] 曾庆兵, 刘成良, 苗玉彬,等. 基于计算机视觉的葡萄茎直径高精度测量方法[J]. 农业机械学报, 2009, 40(12):182-185.
ZENG Q B, LIU C L, MIAO Y B, et al. High accuracy measurement of grape stem diameter based on computer vision[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2009, 40 (12): 182-185. (in Chinese with English abstract)
[6] 杭腾, 毛罕平, 张晓东,等. 基于机器视觉的番茄长势信息无损检测的研究[J]. 农机化研究, 2015(11):192-197.
HANG T, MAO H P, ZHANG X D, et al. Nondestructive testing of tomato growth information based on machine vision[J].JournalofAgriculturalMechanizationResearch, 2015 (11): 192-197. (in Chinese with English abstract)
[7] 李长缨, 滕光辉, 赵春江,等. 利用计算机视觉技术实现对温室植物生长的无损监测[J]. 农业工程学报, 2003, 19(3):140-143.
LI C Y, TENG G H, ZHAO C J, et al. Development of non-contact measurement on plant growth in greenhouse using computer vision[J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2003, 19 (3): 140-143. (in Chinese with English abstract)
[8] SOLDATOS A G, ARVANITIS K G, DASKALOV P I, et al. Nonlinear robust temperature-humidity control in livestock buildings[J].Computers&ElectronicsinAgriculture, 2005, 49(3):357-376.
[9] RAJAOARISOA L H, M’SIRDI N K, BALMAT J F. Micro-climate optimal control for an experimental greenhouse automation[C]// International Conference on Communications, Computing and Control Applications. IEEE, 2012:1-6.
[10] 邓璐娟, 张侃谕, 龚幼民,等. 温室环境多级控制系统及优化目标值设定的初步研究[J]. 农业工程学报, 2005, 21(5):119-122.
DENG L J, ZHANG K Y, GONG Y M, et al. Preliminary study on hierarchical greenhouse environment control system and setting of the optimized target values[J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2005, 21 (5): 119-122. (in Chinese with English abstract)
[11] VANTHOOR B H E, VISSER P H B D, STANGHELLINI C, et al. A methodology for model-based greenhouse design: Part 2, description and validation of a tomato yield model[J].BiosystemsEngineering, 2011, 110(4):378-395.
[12] 员玉良 盛文溢. 基于主成分回归的茎直径动态变化预测[J]. 农业机械学报, 2015,46(1):306-314.
YUAN Y L, SHENG W Y. Prediction of stem diameter variations based on principal component regression[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2015,46(1):306-314 . (in Chinese with English abstract)
[13] 齐藤隆, 片岗节男. 番茄生理基础[M]. 上海:上海科学技术出版社, 1981.
[14] 郑小东, 王晓洁, 赵中堂. 基于形状特征的植物叶柄与叶片分割算法[J]. 计算机工程与设计, 2010, 31(4):918-920.
ZHENG X D, WANG X J, ZHAO Z T. Segmentation algorithm of leafstalk and lamina based on shape feature[J].ComputerEngineeringandDesign, 2010, 31 (4): 918-920.(in Chinese with English abstract)
(责任编辑张 韵)
Environmentcontrolsystemofseedlingboxbasedonimageprocessing
LI Qi, HU Yicong*, WU Fuchuang
(CollegeofElectrical&InformationEngineering,ShaanxiUniversityofScience&Technology,Xi’an710021,China)
In the process of raising seedlings in the domestic market, there are many problems, such as poor facilities, occupying more land resources, and no scientific method of environmental regulation, a kind of environment control system for seedling growing box was designed, and a method for simultaneous determination of stem diameter of multi-seedling was proposed by image processing technique. Firstly, the growth information of seedlings was obtained, the median filter method was used to preprocess the image, and the target area was extracted based on the Otsu automatic threshold segmentation method, through the “stacked wood” way to achieve seedling stem segmentation extraction. Stem diameterDand stem diameter variation ΔDwere the input of fuzzy inference system, the output of the fuzzy inference system was the temperature setting value. Temperature was controlled by PID method to achieve the control of the temperature inside the nursery box. The experimental results showed that the system can adjust the temperature of the seedlings in real time according to the growth of the seedlings, reflect the scientific planting pattern and enhance the economic benefit, and promote the cultivation of high quality seedlings.
image processing; stem diameter; fuzzy inference; PID control
李颀,胡艺聪,武付闯. 基于图像处理的育苗箱环境控制系统[J].浙江农业学报,2017,29(11): 1912-1919.
10.3969/j.issn.1004-1524.2017.11.19
2017-02-22
陕西省科技厅农业科技攻关计划项目(2015NY028);西安市未央区科技计划项目(201305);陕西科技大学博士科研启动基金项目(BJ13-15)
李颀(1973—),女,陕西西安人,博士,教授,主要从事工业自动化与智能控制等方面的教学与科研工作。E-mail: 979959980@qq.com
*通信作者,胡艺聪,E-mail: 819649869@qq.com
TP391.41
A
1004-1524(2017)11-1912-08
猜你喜欢
现代临床医学(2022年2期)2022-04-19
湖北农机化(2021年7期)2021-12-07
娃娃乐园·综合智能(2021年4期)2021-07-20
玩具世界(2020年4期)2020-11-16
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
小朋友·快乐手工(2016年6期)2016-05-14
幼儿智力世界(2015年3期)2015-06-16
自动化仪表(2015年5期)2015-06-15