惯性辅助高动态RTK模糊度浮点解求解算法研究
2017-12-06 05:27:17高亚豪左启耀邹志勤胡文涛
导航定位与授时 2017年6期
高亚豪,左启耀,邹志勤,李 峰,胡文涛
(北京自动化控制设备研究所,北京100074)
惯性辅助高动态RTK模糊度浮点解求解算法研究
高亚豪,左启耀,邹志勤,李 峰,胡文涛
(北京自动化控制设备研究所,北京100074)
载波相位差分(RTK)技术需要着重解决整周模糊度快速精确求解问题。针对高动态应用,提出一种利用惯性信息辅助求解RTK整周模糊度浮点解的算法,建立了基于加速度信息辅助的Kalman滤波器模型,分析了加速度误差和惯导信息延迟对滤波结果的影响,并通过仿真对算法的动态性能进行了深入研究。仿真结果表明,与未受辅助的Kalman滤波算法相比,基于惯性辅助的求解算法能够在高动态下获得较精确的整周模糊度浮点解,使后续整数解的搜索空间更小,提升了模糊度固定效率和成功率;在发生周跳、出现野值和跟踪到新卫星信号的情况下,该算法同样具有很好的模糊度浮点解求解性能;此外,惯导加速度的随机测量误差和信息延迟不会对算法的性能造成较大影响。
惯性辅助;RTK;整周模糊度;Kalman滤波;高动态
0 引言
基于载波相位的动态差分(RTK)技术的关键是整周模糊度的快速准确求解。模糊度的实数估计是模糊度解算的第一步,它为模糊度参数提供一个搜索初始值,通常情况下是浮点数。高精度的模糊度浮点解,能够减小整数搜索空间,有助于提高模糊度固定的成功率和效率。
常用的模糊度浮点解求解方法有最小二乘法和Kalman滤波法。最小二乘法很难实现单历元解算,而利用多历元数据会增加矩阵维数,计算量大大增加,并且存在方程病态的问题。对于Kalman滤波法,由于机动载体的运动复杂多变,系统模型很难准确建立。当载体实际的运动状态与滤波器的动态模型不相符时,容易造成发散。针对这一问题,一些学者提出了一阶时间相关模型(Singer模型)、当前统计模型等动态模型[7],用以提高滤波器的动态适应性,但仍然无法从根本上解决滤波发散问题。
可见,仅利用自身测得的双差观测量难以在动态下获得精度较高的整周模糊度浮点解。而惯性导航系统(INS)具有完全自主、实时性好等优点,能够为差分定位系统提供精度较高的位置和姿态信息。国内外在利用惯性信息辅助求解整周模糊度的领域已取得许多研究成果:1999年,Jan Skaloud提出利用INS信息辅助整周模糊度搜索,从而减小了整数搜索空间,提高了固定成功率;2010年,刘景瑞分别利用INS的航向角信息和位置信息辅助求解整周模糊度,改善了方程状态,提高了模糊度浮点解精度,并通过实验分析了惯导位置精度对模糊度搜索的影响[2];2013年,谢宏飞等分析了在松组合和紧组合两种INS/GPS组合模式下,惯导位置精度对模糊度解算的影响,得出了紧组合模式下INS辅助效果明显优于松组合模式的结论[6]。但这些研究主要集中在利用惯导系统输出的位置信息进行辅助,而惯导的位置信息具有误差随时间累积的缺点,难以取得较好的辅助效果。
针对上述问题,本文提出一种直接利用惯导系统的加速度测量值辅助解算模糊度的Kalman滤波算法。由于加速度信息的辅助,算法模型中不再需要对载体动态特性建模,避免了模型不准确带来的发散现象,从而很好地解决了高动态求解问题。此外,本文深入分析了加速度的测量误差和延时误差对浮点解的影响,最后通过仿真对算法在高动态下的性能进行了验证。
1 惯性信息辅助的模糊度求解算法
在求解整周模糊度浮点解的Kalman滤波模型中,系统的状态向量中除了包含接收机天线的位置和速度参数外,还将整周模糊度作为状态向量的一部分,通过伪距、载波相位双差观测值进行滤波估计,得到接收机天线的位置、速度以及模糊度浮点解。
设待估计的状态向量x为
x=(r,v,N1,N2)T
(1)

在等速模型的基础上,将惯导系统输出的加速度a作为滤波器状态转移函数的输入量,则位置和速度对应的状态转移函数可以写为
(2)
式中,I为3×3的单位阵,ts为2个观测历元之间的时间间隔,ak表示惯导系统在历元k获得的加速度测量值。
单差模糊度参数的状态转移过程与卫星的升降变化及信号跟踪情况有关,需要根据具体的卫星变化情况进行处理,这种处理一般都是非线性的。
系统的过程噪声协方差矩阵可设为对角阵,其对角线元素的大小根据实际载体的运动状态确定。若载体机动频繁或运动过程中受到较大外界干扰,协方差矩阵的对角线元素应设置大一些,否则应设置较小。
设系统的观测向量y为
y=(φ1,φ2,p1,p2)T
(3)

根据双差载波相位和双差伪距的观测方程,可得系统的观测函数为

(4)
其对应的观测噪声协方差矩阵R为
(5)

由于状态转移函数和观测函数都是非线性函数,本文采用扩展Kalman滤波算法计算各个时刻的参数估计值。
加速度测量值的辅助为滤波算法提供了载体运动的先验信息,简化了滤波器的动态模型,从而减小了计算的复杂度。在动态差分定位中,由于周跳、失锁、跟踪到新的卫星信号等情况需要固定整周模糊度时,该滤波算法能够实时给出当前历元估计出的模糊度浮点解及其协方差矩阵,即可用于整数搜索,不需要重新解算双差观测方程。
2 加速度精度对滤波结果的影响分析
惯导系统测得的载体加速度不可避免地存在误差。由于加速度是滤波器的输入量,加速度误差可以看作是滤波器的模型误差。下面分析加速度误差对滤波估计结果的影响。

(6)
而现实滤波得到的参数估计值为
(7)
因此,参数估计的差值为

(8)
其中
(9)

(10)
(11)
因此,式(8)和式(9)可相应转换为
(12)
(13)
将式(13)代入式(12),并取期望得

(14)
在实际的导航应用中,若惯导系统与差分定位系统的采样时间不重叠,或者信息传输速率有限,则可能出现加速度信息的延迟。这种情况下,当载体的加速度变化时,加速度误差不再是一个均值为0的白噪声,并且这种偏差将会对后续的滤波结果产生影响。但本文通过仿真证明,只要将加速度延迟控制在合理范围内,就不会使滤波结果出现较大偏差,并且这部分偏差可以通过后续的滤波作用逐渐减小甚至消除,不会影响模糊度的正确求解。仿真结果见3.4节中所述。
由式(14)可知,为了减小加速度延迟造成的滤波偏差,需要减小矩阵Fk-1和Bk中元素的绝对值。通过增加采样率,缩短每个历元间的时间间隔,即可达到上述目的,从而减小信息延迟的影响。
3 仿真验证
3.1 仿真场景
为了验证新算法的性能,设计了高动态仿真场景,通过Matlab软件模拟高动态载体(如某高速飞行器等)的运动,计算出差分定位所需的各时刻的伪距和载波相位观测量。
仿真场景设定为:时间从2012年4月18日13时2分0秒到当日的13时3分39.8秒,历元间间隔为0.2s,共500个历元。基准站坐标为东经116.1528813°,北纬39.8121276°,高程74.48m,流动站的初始坐标为东经116.1563849°,北纬39.8112269°,高程74.49m。在13时2分0秒时流动站的初速度为1600m/s,方向向西,加速度和加加速度均为0;前20s,流动站的加加速度为8m/s3,方向向东;第20s到第30s流动站的加加速度变为0,做加速度为160m/s2方向向东的匀加速运动;从第30s开始,流动站处于匀速运动状态,速度为1600m/s,方向向东,直至场景结束。
观测噪声为均值为0的高斯白噪声,其中伪距观测量噪声的标准差为0.5m,载波相位观测量噪声的标准差为0.006m,仿真中只使用GPS的L1频点的观测量。伪距和载波相位观测量均不包含接收机钟差、卫星钟差、电离层延迟、对流层延迟等误差,这些误差在中短基线的双差模型中基本都可以抵消。
3.2 动态性能分析
算法I和算法II的位置误差曲线如图1所示,速度误差曲线如图2所示,模糊度浮点解误差曲线如图3所示。
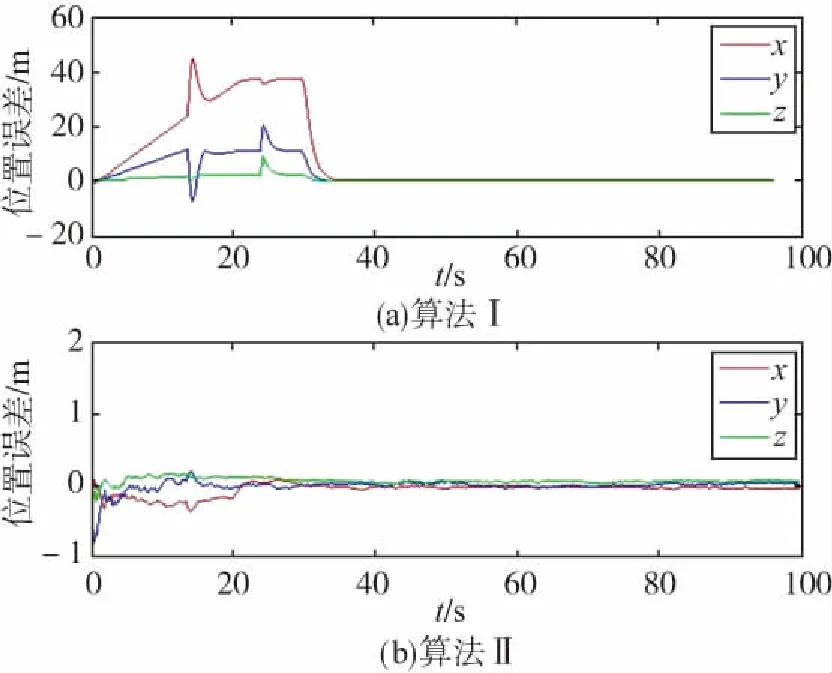
图1 位置误差曲线Fig.1 Position error curve

图2 速度误差曲线Fig.2 Velocity error curve
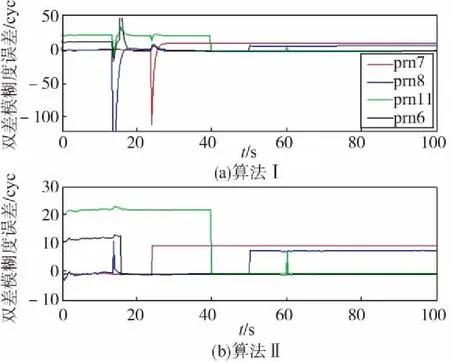
图3 双差模糊度误差曲线Fig.3 Double difference ambiguity error curve
图1和图2中,x、y、z方向分别表示WGS-84坐标系下的3个坐标轴的正向,与状态向量中的位置和速度参数表示的含义相同。在前30s加速度不为0时,采用等速模型的Kalman滤波器(算法I)无法得到正确的位置和速度估计值,它们与真值都有很大的偏差。而惯性辅助的滤波器(算法II)可以得到精度较高的位置和速度,其误差只受加加速度影响。当载体的加加速度为0时,无论加速度有多大,估计值的精度都与匀速运动相同。这说明,通过将惯导系统的加速度信息输入到滤波器中,算法的动态性能得到了极大的提升。
图3中的4条曲线分别表示卫星号为6、7、8、11的卫星与19号卫星组成的双差模糊度。根据仿真场景设定,基准站在第16s和第40s才分别跟踪到6号卫星和11号卫星。在这2个时刻之前,它们对应的单差模糊度参数为0,此时图中曲线表示的是参考星单差模糊度的相对变化情况,没有实际意义。当获得它们的观测量后,曲线才表示对应卫星的双差模糊度。因此,从这2个时刻开始,6号卫星和11号卫星的模糊度曲线才分别开始向真值收敛。第16s,算法I中的6号卫星模糊度发生了大跳变,然后才逐渐向真值收敛。而对于算法II,6号卫星在此时可以迅速得到精度较高的浮点解。
根据仿真场景设定,8号卫星和11号卫星的载波相位观测值分别在第14s和第60s出现了野值;第24s,7号卫星出现了大小为10周的周跳;第50s,8号卫星出现了大小为8周的周跳。当某颗卫星发生周跳后,它的模糊度误差曲线应收敛到其周跳的周数。因此,第24s后7号卫星的模糊度误差曲线最终收敛到10,第50s后8号卫星的模糊度误差曲线最终收敛到8。前30s内,算法II在出现野值和周跳后,相应的模糊度参数都可以快速收敛到真值附近,不会出现算法I中的大跳变。
以上结果表明,当高动态环境下出现观测量异常时,即跟踪到新卫星信号、出现野值或发生周跳时,惯性辅助的滤波器仍然可以正常滤波,且收敛速度快。需要说明的是,滤波改善效果仅在加速度不为0时能够明显体现出来,而当载体作匀速运动时,一般的Kalman滤波器也能够正常滤波。惯性辅助的算法在复杂动态环境中具有明显优势。
3.3 辅助算法对模糊度固定的改善
当仿真场景中所有卫星都正常跟踪时,考察两种滤波算法得到的模糊度浮点解及其协方差矩阵对模糊度固定的影响。
对滤波得到的每个历元的浮点解及其协方差矩阵采用LAMBDA算法进行降相关变换和整数搜索,分别统计两种算法对应的整数搜索时间和固定成功率如表1所示。

表1 两种算法的模糊度固定结果Tab.1 The results of fixing ambiguities oftwo kinds of algorithm
表1中的成功率是用模糊度搜索成功的历元数除以总历元数得到的,其中总历元数包括滤波器未收敛时的历元,因此该成功率并不是接近100%,而滤波器收敛后即可固定成功。表1中的平均搜索时间是指Matlab软件在每个历元执行整数搜索程序所用时间的算术平均值。模糊度搜索采用的是椭球空间逐步缩小的方法,初始的搜索空间为无穷大,无需人为设定。因此,整数搜索时间与搜索参数设置无关。
两种算法每个历元的搜索时间如图4所示。
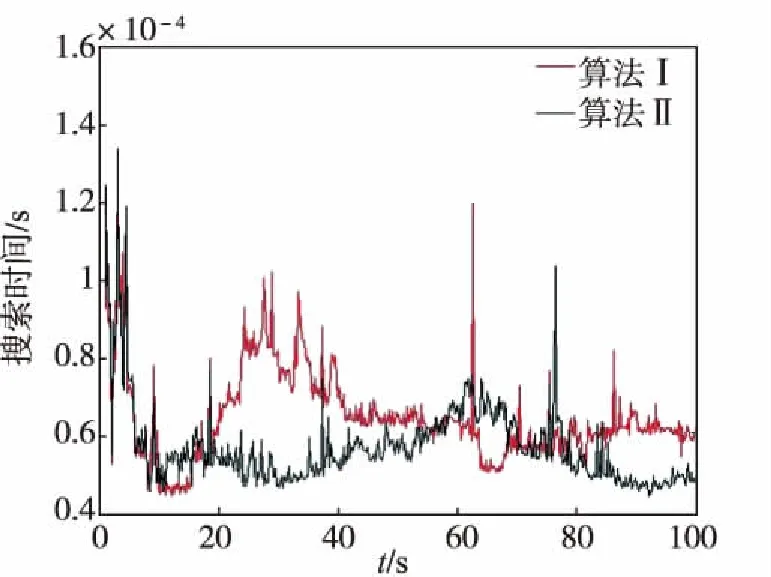
图4 两种算法的搜索时间曲线Fig.4 The searching time curve of two algorithms
固定成功率反映了模糊度解的有效性,而整数搜索时间能够直接反映搜索的效率。可见,算法II在固定成功率和搜索效率上都明显优于算法I。从图4中可以看出,在加速度较大时,2个算法对应的搜索时间差别较大;当加速度变为0后,搜索时间的差别逐渐减小。
上述结果证明,加速度辅助的Kalman滤波器在复杂动态条件下提高了模糊度浮点解的精度,对模糊度固定具有明显改善作用:一方面提高了固定成功率,增加了模糊度解的可靠性;另一方面缩小了搜索空间,使得整数搜索时间减少,提高了解算效率。
3.4 加速度误差和延迟的影响分析
利用3.2节中的仿真场景,在不存在加速度信息延迟的情况下,对惯导的加速度添加不同大小的随机误差,其仿真结果如图5所示。
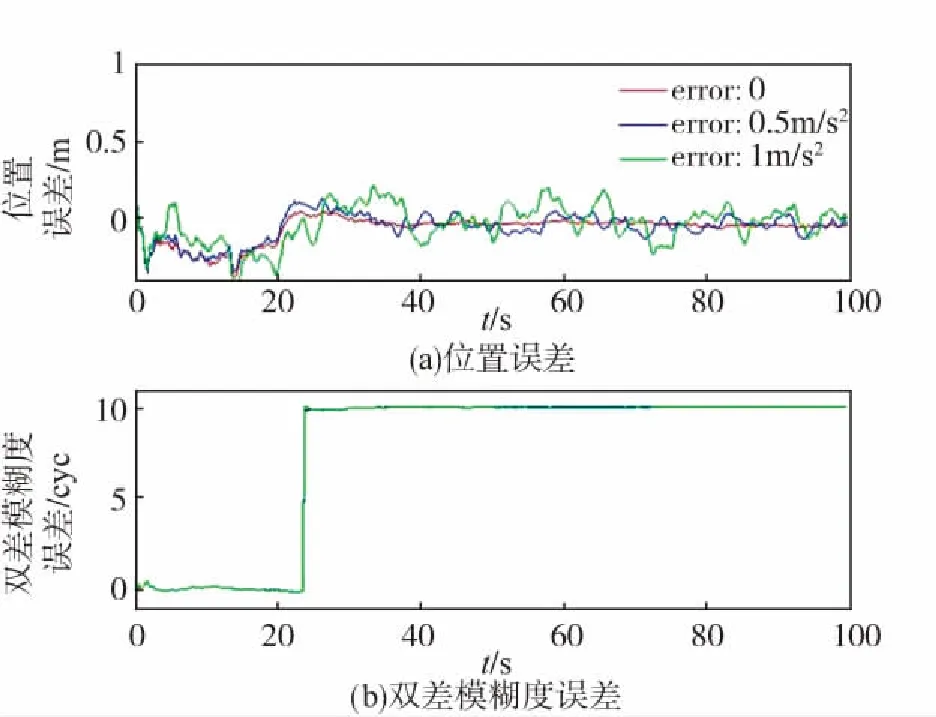
图5 加速度误差大小对滤波结果的影响Fig.5 The influence of acceleration error on the filter results
图5(a)表示流动站x坐标分量的误差大小变化曲线,图5(b)表示7号卫星的双差模糊度浮点解误差曲线,其含义与图3相同。图中3条曲线对应的加速度随机误差标准差分别为0m/s2、0.5m/s2和1m/s2。可见,当用于辅助解算的加速度含有随机测量误差且不存在信息延迟时,滤波得到的位置误差在0附近上下波动,波动的大小与加速度误差呈正相关;当存在加速度误差时模糊度参数仍然能够快速收敛,不受加速度误差大小的影响。因此,可以证明这种滤波估计是无偏的。
下面利用3.2节中的仿真场景对加速度延迟的影响进行仿真分析。设加速度的随机测量误差的标准差为0.1m/s2,在加速度分别延迟0s、20ms和50ms的情况下,对算法进行了仿真,仿真结果如图6所示。
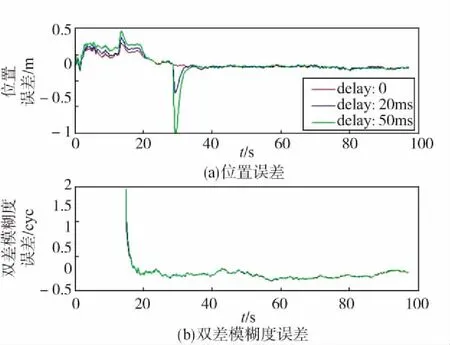
图6 加速度延迟对滤波结果的影响Fig.6 The influence of acceleration delay on the filter results
图6(a)表示流动站x坐标分量的误差大小变化曲线,图6(b)表示6号卫星的双差模糊度浮点解误差曲线,其含义与图3相同。从上述结果中可以发现,只有当流动站的加速度变化时,加速度信息的延迟才会对滤波结果产生影响,并且延迟越大,滤波结果的误差越大。当加速度趋于稳定时,误差逐渐减小,消除了加速度延迟带来的影响。第30s加速度从160m/s2突变为0,惯导加速度信息的延迟使得滤波结果出现较大误差,而之后该误差迅速收敛到0。可以看出,加速度延迟对动态模型造成的误差可以通过滤波作用消除,不会对后续结果产生影响。此外,加速度延迟对模糊度参数的收敛速度影响很小,没有导致算法动态性能的下降。
4 结论
本文主要研究了惯性信息辅助求解整周模糊度浮点解的Kalman滤波算法。由于惯性信息的辅助,Kalman滤波器的动态性能有了明显提高,并通过理论分析和仿真证明,在一定条件下,加速度测量误差及其传输延迟不会使滤波结果产生较大偏差。将普通算法与辅助算法进行仿真对比,突显出辅助算法应用于RTK技术的2个明显优势:1)在高动态下提高了参数估计的精度,并且在遇到周跳、野值或跟踪到新卫星的情况下仍能够快速收敛;2)由于模糊度浮点解精度的提高,缩小了后续模糊度整数搜索的空间,提高了搜索效率和固定成功率。
[1] 刘春卓. 基于载波相位的SINS/GPS系统研究[D]. 西安: 西北工业大学, 2005.
[2] 刘景瑞. INS辅助差分GPS组合定位中的模糊度确定的理论研究及实现[D]. 济南: 山东科技大学, 2013.
[3] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[4] Chui C K, Chen G R. 卡尔曼滤波及其实时应用(第4版)[M].北京: 清华大学出版社,2013.
[5] 许阿裴, 归庆明, 韩松辉. 卡尔曼滤波模型误差的影响分析[J]. 大地测量与地球动力学, 2008, 28(1): 101-104.
[6] 谢宏飞, 郝金明, 刘伟平. INS位置精度对GPS整周模糊度解算影响分析[J]. 全球定位系统, 2013, 38(1): 52-56.
[7] 鲍裕良. 基于DSP采集和处理GPS信号的系统设计[D]. 武汉: 武汉理工大学, 2005.
[8] 孙红星. 差分GPS/INS组合定位定姿及其在MMS中的应用[D]. 武汉: 武汉大学, 2004.
[9] 刘超. GPS高精度准实时动态定位算法研究及其程序实现[D]. 西安: 长安大学, 2013.
[10] Geng Y R,Wang J L.Adaptive estimation of multiple fading factors in Kalman filter for navigation applications[J].GPS Solutions,2008,12(4):273-279.
[11] Feng W J,Yang S Z,Zhao F.Adaptive filtering algorithm to GPS/INS integrated system[C]//Proceedings of the 2001 International Conference on Info-Tech and Info-Net(ICII).Beijing,2001:352-356.
[12] Hide C, Moore T, Smith M.Adaptive Kalman filtering algorithms for integrating GPS and low cost INS[C]//Position Location and Navigation Symposium.IEEE Xplore, 2004:227-233.
TheResearchonAlgorithmofAmbiguityFloatSolutionofHighDynamicalRTKBasedonInertialAiding
GAO Ya-hao, ZUO Qi-yao, ZOU Zhi-qin, LI Feng, HU Wen-tao
(Beijing Institute of Automation Control Equipment,Beijing 100074,China)
As it is crucial to focus on solving the problem of fast and accurate resolution of integer ambiguity in carrier phase differential (RTK) technique, for the high dynamic application, a new method of RTK integer ambiguity float solution based on inertial information aiding is presented and a Kalman filter model based on acceleration aiding is established. The influence of acceleration error and INS information delay on the filter results are analyzed, and deep research on the dynamic performance of the algorithm by simulation is made. The simulation results show that the algorithm based on inertial aiding can obtain a more accurate integer ambiguity float solution under highly-dynamic condition compared with the non auxiliary Kalman filtering algorithm. It makes the following search space of integer solution smaller and improves the efficiency and success rate of fixing ambiguity. In the event of the cycle slip, the outlier and tracking to the new satellite signals, the algorithm also has a better performance of the resolution of the ambiguity float solution similarly. Besides, the random measurement error and information delay of INS acceleration won’t affect the performance of the algorithm greatly.
Inertial aiding; RTK; Integer ambiguity; Kalman filtering; High dynamic
2016-10-08;
2017-04-27
高亚豪(1992-),男,硕士研究生,主要从事北斗动态差分定位方面的研究。 E-mail:heu_ziguanhui@163.com
10.19306/j.cnki.2095-8110.2017.06.010
TN967.1
A
2095-8110(2017)06-0061-07
猜你喜欢
计算技术与自动化(2024年3期)2024-10-10 00:00:00
导航定位学报(2022年2期)2022-04-11 03:17:34
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
铁道通信信号(2019年4期)2019-10-10 03:42:38
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38
火控雷达技术(2016年2期)2016-02-06 02:29:00