
基于李群谱配点法的卫星姿态仿真
2017-12-06 05:26李益群吴勃英王常虹
导航定位与授时 2017年6期
李益群,吴勃英,王常虹
(1.哈尔滨工业大学 理学院数学系,哈尔滨150001;2.哈尔滨工业大学 空间控制与惯性技术研究中心,哈尔滨 150001)
基于李群谱配点法的卫星姿态仿真
李益群1,吴勃英1,王常虹2
(1.哈尔滨工业大学 理学院数学系,哈尔滨150001;2.哈尔滨工业大学 空间控制与惯性技术研究中心,哈尔滨 150001)
为了提高卫星姿态控制系统仿真的精度、可信性和长时间稳定性,提出了一种基于李群谱配点法的卫星姿态仿真方法。对于李群上动力学系统的仿真,李群谱配点法具有独特的优势,不仅能很好地保持系统的几何结构,而且具有几何收敛性。主要结合李群算法和谱方法各自的优势,给出了几何动力学与控制系统李群谱配点法的构造方法并将该算法应用于欠驱动卫星系统的姿态控制系统仿真中。
李群;谱配点法;几何动力学;卫星姿态
0 引言
卫星姿态有众多的参数化描述方法,其中包括三维欧氏空间中的欧拉角描述,非欧空间中的四元数描述(一般看成四维欧氏空间中的向量),以及本文所用的SO(3)群描述方法。不管是哪种欧拉角和四元数描述方法都不能全局、唯一地表示卫星的姿态。欧拉角不能全局地表示卫星的所有姿态,虽然四元数可以全局地表示卫星的姿态,但是其不具有唯一性,基于其的姿态控制可能会产生系统的退绕现象,最终导致星载能源的大量浪费[1]。为了全局、唯一地表示卫星姿态,本文中用SO(3)群
SO(3)={R∈R3×3|RRT=I3,det(R)=1}
描述系统的姿态,并基于此类李群描述给出了欠驱动卫星系统的几何姿态动力学方程和几何控制律[2]。既然,卫星姿态动力学与控制系统的描述都是基于非线性流形(李群),那么,相对于欧氏空间的数值仿真算法,用几何数值积分法对欠驱动卫星控制系统进行仿真将具有更好的几何结构保持性,也更加自然、可信。
卫星姿态控制系统的几何模型描述如下[3]:

(1)
这里g∈SO(3)表示卫星的姿态,V∈SO(3)={V∈R3×3|VT=-V}表示卫星在空间坐标系下的角速度,U表示外部控制量。
过去几十年间,有大量针对非线性流形上系统非线性控制方法的研究,如反馈线性化、反步法、滑模变结构等。这些方法往往只适用于某些特定的非线性控制系统,且控制律只具有小范围有效性。科研工作者和工程技术人员一直试图用更加先进的数学工具来描述和分析非线性系统的控制问题[4-6],以期达到更广的适用性和更精准的控制效果。其中,几何非线性控制的专著[7-9]很多都阐述了微分流形理论在非线性控制中的重要作用。本文数值仿真算例中用到的几何控制律主要是源于以下定理。
定理1[10](SO(3)上的PD+前馈控制)对于式(1)所示的控制系统,令Kp、Kd为对称、正定矩阵,则以下的控制律为
U=-f(g,V)-Kplog(g)-KdV
可以使状态g从任何初始条件{g0|tr(g0)≠-1}指数收敛于I∈SO(3),只要Kp和V0满足以下的不等式
这里λmin(KP)表示矩阵KP的最小特征值。
可以看出,以上的控制律不需要对卫星模型进行局部参数化,而是完全由李群和其相应的李代数表示。在后文的数值算例中,将运用以上的几何控制律实现欠驱动卫星姿态的快速自旋稳定。
相对于欧氏空间中的数值算法,对于几何控制系统式(1)的仿真,几何数值积分法如:辛Runge-Kutta法[11]、变分积分子[12]、李群方法[13]、李群变分积分子[14]等,具有独特的优势。变分积分子在长时间数值仿真中保辛、保动量且有很好的能量保持特性;李群方法能够保持系统的群结构;李群变分积分子继承了以上两种方法的所有优点。基于以上方法的动力学和控制系统的仿真,能够更真实地仿真和理解复杂动力学和控制系统的长时间特性。本文结合李群算法和具有几何收敛性的谱配点法构造了高精度、保李群结构的数值仿真算法,并将其应用于欠驱动卫星姿态控制系统的仿真中。
1 三维特殊正交群SO(3)上的谱配点法
本节主要介绍一种保持系统李群结构且能达到任意高阶精度的几何数值积分法—李群谱配点法。该算法的核心思想是通过正则坐标将流形M切丛TM上的微分方程转化为其相应李代数切空间(向量空间)Tg上的方程,然后用谱方法求解转化后的方程,并在每一步数值迭代中将求解的数值结果通过重构映射拉回到原始的流形上。
不失一般性,考虑以下矩阵李群上的运动学方程

g(t)∈G,V(t,g)∈g
(2)
定理2[15]对于t≥0,式(2)的解可以表示如下
g(t)=τ(θ(t))g0
(3)
这里θ∈g满足以下的微分方程

(4)
定理2给出了将李群上运动学方程转化为其相应李代数上方程的方法。李群谱配点法的步骤如图1所示。

图1 流形上谱方法的转化示意图Fig.1 The commutative diagram of spectral methods on manifolds
1.1 流形上的正则坐标


(5)
这里[·,·]表示李代数上的对易子,Bk表示Bernoulli数。在李代数SO(3)上,指数映射exp可以通过Rodrigues公式精确求得

θ∈SO(3)
(6)
这里I是3×3的单位矩阵,θ是一个三维向量。对任意的李代数θ∈g

(7)
1.2 数值算法构造
基于以上对算法思想和正则坐标映射的介绍,下面给出具体李群谱配点算法的构造方法。首先给出基于张量积运算的多维常微分系统的谱配点方法[19]的介绍,然后将该方法推广应用于SO(3)群上的系统。以Chebyshev配点法为例,我们考虑以下的非线性初值问题:
(8)
其中
这里m表示李代数的维数。记

为区间[-1,1]上的Chebyshev-Gauss-Lobatto点。那么,将其通过平移和放缩映射到区间[t0,T]上,其相应的Chebyshev-Gauss-Lobatto点为

记D(1)为区间[-1,1]上的一阶Chebyshev微分矩阵,其指标由0变到N
Di,j(1)=
(9)
从而可以通过一阶Chebyshev微分矩阵将式(8)离散化为以下方程组的形式

(10)
其中,


(11)
式中,Im是m×m维的单位矩阵。这样式(8)的数值解vec(Q)可以通过求解式(11)得到。以上的算法可以总结为如下步骤。

2)选择一种谱配点法和非线性方程组求解方法;
3)用所选择的谱配点法求解如下李代数上的初值问题

4)运用重构公式gn+1=τ(θ)gn求解gn+1。
2 数值仿真(欠驱动卫星系统的自旋稳定)
为了验证以上算法的效果,仿真如图2所示的欠驱动卫星控制系统。
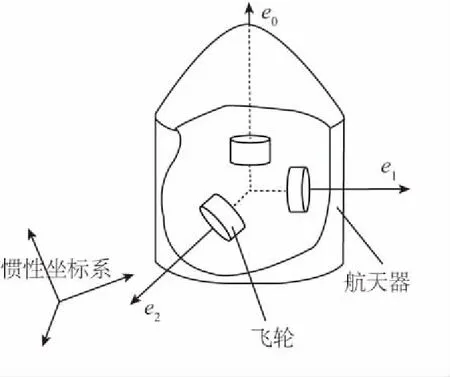
图2 卫星-飞轮系统示意图Fig.2 The illustration of satellite-flywheel system
假设卫星的3个正交飞轮中的一个失效,其他的控制力矩和本体坐标系都是沿卫星的主轴,那么卫星在其本体坐标系下的惯性矩阵可以用对角矩阵J=diag(J1,J2,J3)表示,其运动学和动力学模型可以表示如下:
这里M0表示系统的初始角动量,ui是控制力矩,e1=[1,0,0]T,e2=[0,1,0]T。系统的各项参数如表1所示,
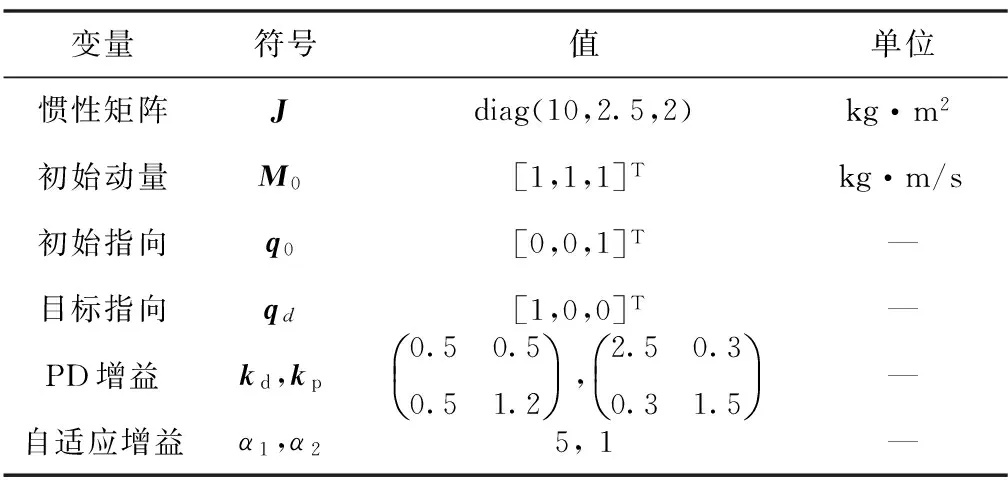
表1 欠驱动卫星控制系统参数
使用以下的自适应控制律[20]实现对该系统的90°旋转,并最终达到自旋稳定
(12)
其中,

其中,e0=[0,0,1]。用李群Chebyshev方法仿真以上的系统,图3给出了卫星角速度的变化情况,可以看出卫星最终达到了自旋稳定;图4给出了实际指向与目标指向之间的距离,从图中的曲线不难看出几何控制律式(12)的指数收敛性;图5给出了卫星的指向向量由q0变化到qd的过程;图6所示为球面上卫星从初始指向到目标指向运动的过程,可以看出运用李群谱配点法的仿真使得卫星的指向向量严格地保持在球面上。如图6所示,最理想的姿态调整曲线应该是球面上点q0到qd的测地线,从数值仿真结果可以看出,以上的控制律没有使系统的指向沿球面测地线高效地运动到目标指向,这跟控制系统中比例增益和微分增益的大小密切相关。今后,将研究如何有效地调节本文中增益kp、kd、α的值,以达到更好的控制效果。

图3 卫星角速度Fig.3 Angular velocity of the satellite
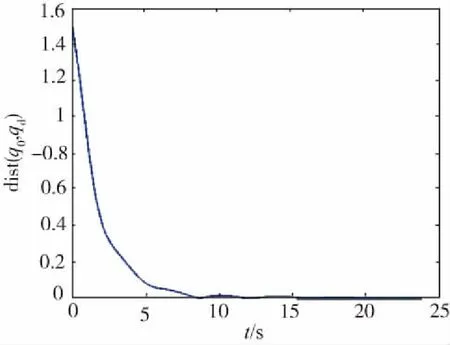
图4 卫星指向与目标之间的距离 Fig.4 Distance between the orientation of the satelliteand the desired orientation
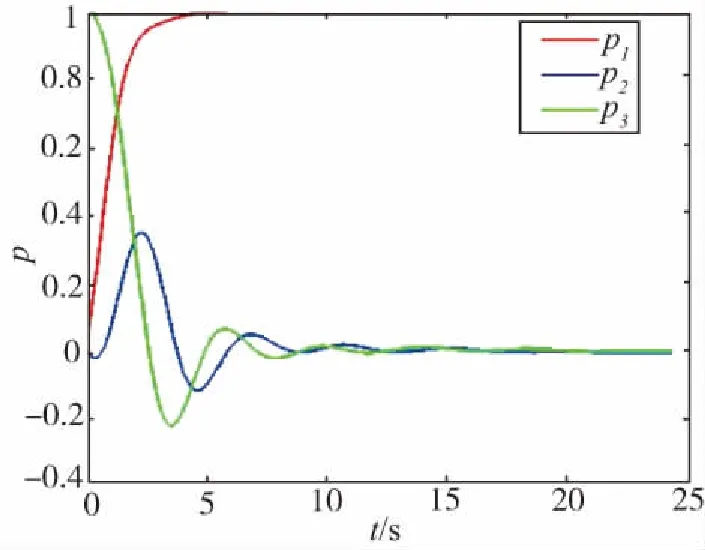
图5 卫星的指向向量Fig.5 Orientation of the satellite
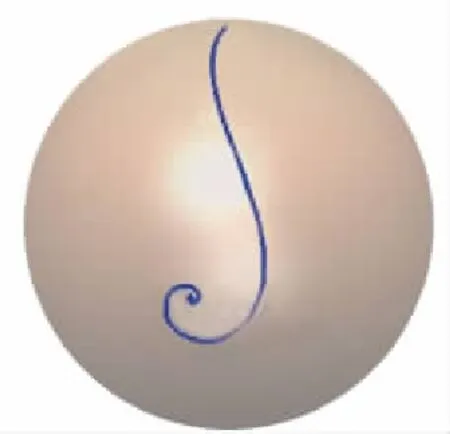
图6 球面上卫星的旋转轨迹Fig.6 Orientation trajectory of the satellite on the sphere
3 结论
本文给出了基于李群谱配点法的欠驱动卫星控制系统仿真。文中对欠驱动卫星系统的建模、控制和仿真都是基于微分几何的方法。通过数值仿真,验证了文中所介绍李群谱配点法的有效性、精确性和对所仿真控制系统几何结构的保持性。与此同时,也验证了文中所给非线性几何控制律的指数收敛性。在以后的研究中,将把以上的李群谱配点法拓展应用于多体系统的动力学与控制问题仿真中。
[1] Bhat S P, Bernstein D S. A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon[J]. Systems amp; Control Letters, 2000, 39(1): 63-70.
[2] Jouan P. Controllability of linear systems on lie groups[J]. Journal of Dynamical and Control Systems, 2011, 17(4): 591-616.
[3] Marsden J E, Ratiu T. Introduction to mechanics and symmetry: a basic exposition of classical mechanical systems[M]. Springer Science amp; Business Media, 2013.
[4] Brockett R W, Stokes A, Park F. A geometrical formulation of the dynamical equations describing kinematic chains[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Atlanta, 1993: 637-641.
[5] Jurdjevic V, Sussmann H J. Control systems on lie groups[J]. Journal of Differential Equations, 1972, 12(2):313-329.
[6] Crouch P E. Geometric structures in systems theory[C]//IEE Proceedings D-Control Theory and Applications. IET, 1981, 128(5): 242-252.
[7] Bloch A, Baillieul J, Crouch P, et al. Nonholonomic mechanics and control[M]. New York: Springer, 2003.
[8] Agrachev A A, Sachkov Y L. Control theory from the geometric viewpoint[M]. Springer Science amp; Business Media, 2004.
[9] Bullo F, Lewis A D. Geometric control of mechanical systems[M]// Geometric Control of Mechanical Systems. Springer, 2005:2111.
[10] Bullo F, Murray R M. Proportional derivative (PD) control on the Euclidean group[C]//European Control Conference. 1995: 1091-1097.
[11] Jones B A, Anderson R L. A survey of symplectic and collocation integration methods for orbit propagation[C]// Proceedings of the AAS/AIAA Spaceflight Mechanics Conference. 2012: 1-20.
[12] Marsden J E, West M. Discrete mechanics and variational integrators[J]. Acta Numerica, 2001, 10(1): 357-514.
[13] Iserles A, Munthe-Kaas H Z, Nørsett S P, et al. Lie-group methods[J]. Acta Numerica, 2000, 9(2): 215-365.
[14] Lee T, Leok M, McClamroch N H. Lie group variational integrators for the full body problem in orbital mechanics[J]. Celestial Mechanics and Dynamical Astronomy, 2007, 98(2): 121-144.
[15] Bou-Rabee N, Marsden J E. Hamilton-Pontryagin integrators on Lie groups part I:Introduction and structure-preserving properties[J]. Foundations of Computational Mathematics, 2009, 9(2): 197-219.
[16] 陈省身, 陈维恒. 微分几何讲义[M]. 北京:北京大学出版社,2001.
[17] Engø K. On the construction of geometric integrators in the RKMK class[J]. BIT Numerical Mathematics, 2000, 40(1): 41-61.
[18] 张素英, 邓子辰. 非线性动力学系统的几何积分理论及应用[M]. 西安:西北工业大学出版社,2005.
[19] Trefethen L N. Spectral methods in MATLAB[M]. Society for Industrial and Applied Mathematics. Philadelphia, PA,2000.
[20] Bullo F, Murray R M, Sarti A. Control on the sphere and reduced attitude stabilization[J]. IFAC Proceedings Volumes, 1995, 28(14): 495-501.
LieGroupSpectral-CollocationMethodfortheAttitudeSimulationofSatellites
LI Yi-qun1, WU Bo-ying1, WANG Chang-hong2
(1.College of Science, Mathematics Department, Harbin Institute of Technology, Harbin 150001, China;2.Space Control and Inertial Technology Research Center, Harbin Institute of Technology, Harbin 150001, China)
In order to improve the simulation accuracy, credibility and long-time stability of satellite control systems, an attitude simulation method based on Lie group spectral-collocation algorithm is proposed. Lie group spectral-collocation algorithm has its unique advantages for the simulation of dynamical systems evolving on Lie groups. It can not only keep the geometry structure of the system, but also converge geometrically. The construction of Lie group spectral-collocation method is introduced for the simulation of dynamical and control systems and it is applied in the simulation of attitude control of an under-actuated satellite.
Lie group; Spectral-collocation methods; Geometric dynamics; Satellite attitude*
10.19306/j.cnki.2095-8110.2017.06.003
V412.4
A
2095-8110(2017)06-0019-05
2017-08-21;
2017-11-13
国家自然科学基金面上项目(NSFC11271100)
李益群(1988-),男,理学博士,主要从事计算几何力学和几何控制理论的研究。E-mail:liyiqun_hit@163.com
王常虹(1961-),男,教授,博导,主要从事飞行器导航、制导与控制方面的研究。E-mail:cwang@hit.edu.cn
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
学生天地(2020年3期)2020-08-25
福建基础教育研究(2019年6期)2019-05-28
汽车观察(2018年9期)2018-10-23
中学物理·高中(2016年8期)2016-08-08
诗选刊(2015年4期)2015-10-26
阅读(中年级)(2009年11期)2009-04-14
