
基于GNSS速度信息辅助的飞行器姿态保持技术研究
2017-12-06 05:22申亮亮邵会兵
导航定位与授时 2017年6期
王 彬,申亮亮,邵会兵
( 北京控制与电子技术研究所,北京 100038)
基于GNSS速度信息辅助的飞行器姿态保持技术研究
王 彬,申亮亮,邵会兵
( 北京控制与电子技术研究所,北京 100038)
为了提高飞行器精确打击和侦察探测能力,针对飞行器组合导航系统高精度、长航时和高可靠的姿态保持问题,研究了一种基于 GNSS 速度信息辅助的飞行器姿态保持技术。通过采用开环修正和闭环修正结合的工作方式,克服了惯性导航误差随时间不断积累引起的滤波精度下降问题;通过对GNSS信息进行χ2检测,避免飞行器作大机动飞行或有外部干扰时引起的 GNSS 信息异常,确保GNSS信息的有效性;通过对GNSS 速度信息的时间延迟进行扩展建模,抑制 GNSS 数据延迟对姿态保持算法的影响。仿真和实际数据处理结果表明:该姿态保持技术充分利用惯性导航系统和GNSS的优点,技术方案合理,能够满足飞行器高精度、长航时和高可靠姿态保持的需求,具有较好的工程应用价值。
GNSS;飞行器;姿态保持
0 引言
为了提高飞行器精确打击和侦察探测能力,飞行器的导航系统要能够为自身制导与控制系统提供高精度的姿态基准。
高空、长航时飞行器由于飞行距离远、航行时间长,对导航系统的自主性和精确性提出了很高的要求。惯性导航系统(INS)以其短时精度高、自主性强、信息连续性好等优点而被广泛采用,但它也存在着自身不可克服的缺点,即误差随时间不断积累[1-3]。为了克服其缺点,目前普遍采用基于惯性导航的组合导航系统。卫星导航系统(GNSS)以其全天候工作、精度高、实时提供三维速度、位置信息等优势,成为高精度导航定位的重要手段[6-7]。美国的GPS是目前世界上应用最广、精度最高的卫星导航系统,俄罗斯也成功研制了自己的 GLONASS卫星导航系统。我国已成功建成北斗导航系统,并正在建设具备全球导航能力的北斗二代卫星导航系统。鉴于卫星导航系统能够提供稳定的三维速度、位置信息,利用卫星导航系统与惯导组成的组合导航系统得到广泛应用,并已经成为目前长航时导航领域主要的导航系统。GNSS系统可以对外输出位置和速度信息,考虑到机载GNSS的速度测量精度高、飞行器空中环境下的激励充分、基于速度信息辅助INS/GNSS组合导航算法收敛速度较快等因素,设计了一种基于GNSS速度信息辅助姿态保持技术,利用飞行器上INS和GNSS的速度误差作为观测量,估计飞行器INS失准角,进而用以修正INS姿态信息,实现长航时姿态保持。
1 方案概述
典型长航时飞行器的飞行过程包括起飞前准备、爬升飞行、飞机空中盘旋飞行、返航等阶段。在飞行过程中,飞行器的姿态保持系统采用INS/GNSS组合导航技术,进行INS系统的姿态保持。具体方案如图1所示。
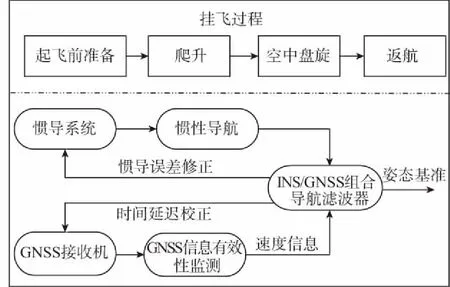
图1 姿态保持系统具体工作过程Fig.1 The measurement principle of attitude hold system
根据长航时飞行过程各个阶段的特点,在起飞开始阶段姿态保持系统仅输出INS系统的导航信息;待GNSS数据稳定后,GNSS信息可用时,姿态保持系统再输出滤波后的导航结果;考虑到系统长时间工作时的误差积累引起滤波精度下降,采用开环修正和闭环修正结合的方式,在姿态保持计算过程中主要对INS信息进行开环修正,但需要每隔一段时间对INS系统的计算结果进行一次闭环校正。卡尔曼滤波的观测量为INS系统输出速度与GNSS速度的差值,观测噪声和系统噪声的设定以实际设备的精度指标为参考。
2 姿态保持系统数学模型建立
2.1 GNSS信息传输延迟的补偿
将INS、GNSS的速度差值作为观测信息时,在载体静止或匀速运动的情况下,GNSS解算的位置和速度信息基本不变,时间延迟的影响可以忽略;但是在载体转弯、加速等机动情况下,位置和速度信息是时变的,INS、GNSS的速度信息会由于时间延迟而产生较大的误差,影响误差的估计和补偿精度。
当INS与GNSS之间的时间延迟未知时,可以将INS、GNSS之间的时间延迟作为一个随机常值处理,即假设GNSS数据的时间延迟为Δt,则其在组合导航系统中的状态模型为[3]

(1)
据此可将其扩充到系统的状态量中,利用卡尔曼滤波估计出时间延迟并补偿。
2.2 GNSS信息有效性的判断
GNSS系统在导航定位过程中,当载体作大机动飞行或有外部干扰时,GNSS信息有可能中断,或可能因动态误差过大而引起单点突跳。因此在组合导航过程中必须对GNSS信息的有效性进行判断。通过设定合理的门限,对PDOP值、解算卫星颗数以及每一时刻GNSS位置和速度信息的变化率进行比较,即可实现对GNSS信息有效性的初步判断。
在此基础上,利用χ2检测法对卡尔曼滤波观测量残差进行故障检测来进一步判断GNSS信息的有效性[9]。先根据极大似然比检验原理,构造信息(卡尔曼滤波观测量残差)异常检测函数;再利用预先设定的门限值和异常信息判别准则来判定GNSS信息是否存在异常。具体的实现过程如下。
组合导航中,系统的滤波残差为
rk=Zk-HkXk,k-1
(2)
其中,Zk为系统的观测量,Hk为观测矩阵,Xk,k-1为系统的一步状态预测值。
通过对滤波残差的均值进行检验就可以确定GPS速度信息是否发生异常。根据极大似然比检验原理,构造信息异常检测函数:
(3)
其中,Rk为观测噪声矩阵,Pk,k-1为滤波噪声方差矩阵。

(4)
当某一时刻GNSS速度信息出现异常时,只进行状态更新不进行量测更新。
2.3 INS/GNSS组合系统状态模型


(5)
其中,状态转移矩阵F(t)可以根据INS系统位置、速度和姿态误差模型建立,Δt可以根据式(1)建立。
系统噪声矢量为

(6)

2.4 组合系统的量测模型
基于GNSS速度信息匹配的组合导航系统的量测方程为
Zk=HkX+V
(7)
其中,V为观测噪声矩阵;Zk=[ΔvxΔvyΔvz]T,Δvx、Δvy、Δvz分别为INS与GNSS速度差值在当地地理系下的投影;系统的观测矩阵为
(8)

3 仿真实验与结果分析
3.1 数学仿真结果分析
(1)仿真条件
结合飞行试验的基本过程,飞行轨迹的设计主要包括水平加速、爬升、空中盘旋、匀速飞行等过程,飞行时间3h,飞行轨迹如图2所示。设初始北向、东向失准角误差为1′,天向失准角为30′;陀螺常值漂移0.09(°)/h,随机漂移为0.05(°)/h;加速度计零偏2×10-4g0,随机噪声为1×10-4g0;GNSS速度测量噪声为0.1m/s。

图2 (a)飞行轨迹在水平面的投影Fig.2 (a)The horizontal projection of flight path

图2 (b)飞行高度曲线Fig.2 (b)The altitude of flight path
(2)信息传输延迟补偿仿真
为了凸现时间延迟误差的补偿效果(匀速飞行条件下时间延迟的影响较小),设定载体在空中进行200s的加速和减速运动,加速度最大为0.5m/s2;在组合导航过程中,将GNSS数据的时间延迟分为常值和随机量,分别设定为0.5s和0.1s。
实际设置的时间延迟与组合导航估计出的时间延迟曲线如图3所示。可以看出,该姿态保持技术能够较为准确地估计出GPS数据的时间延迟。时间延迟补偿前后的姿态角误差对比如图4所示。
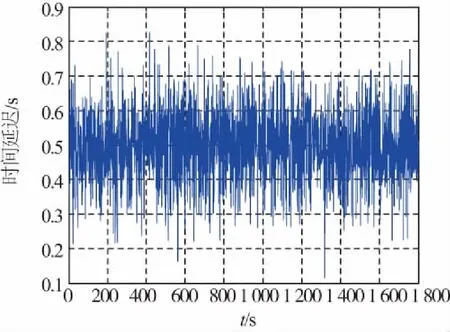
图3 (a)GNSS数据时间延迟图Fig.3 (a)Time-delay of GNSS data
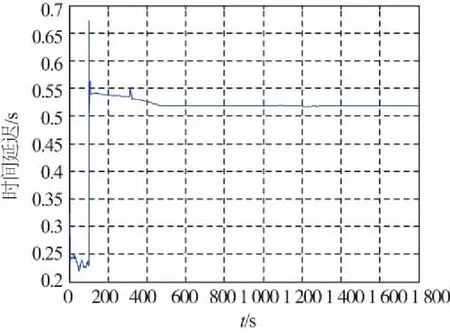
图3 (b)时间延迟的估计结果Fig.3 (b)The estimate result of GNSS time-delay

图4 时间延迟补偿前后的方位角误差Fig.4 Azimuth errors before and after time-delay comprehension
从仿真结果可以看出,在动态条件下,对时间延迟不进行状态扩展时,载体的姿态会存在较大的波动,甚至引起姿态误差无法满足指标要求;对时间延迟进行扩展建模,可以有效估计和补偿时间延迟的影响,使系统的姿态输出更加平稳,满足指标要求。
(3)χ2检测法仿真
在t=300s、t=600s时,在GPS速度信息中加入幅值为2m/s的单点冲击异常值;在1100~1300s加入幅值为2m/s的正弦形式异常值。采用基于残差的χ2检验法进行检验,异常检验曲线如图5所示。
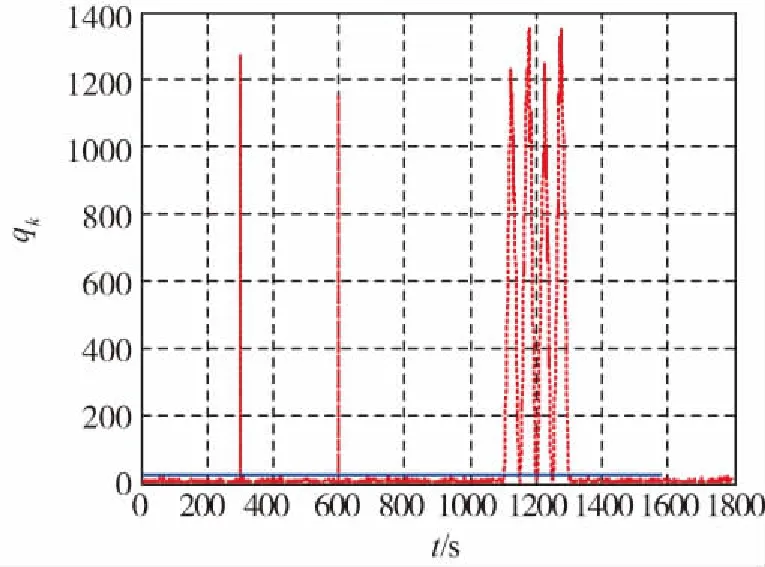
图5 信息异常检验结果Fig.5 The test result of information abnormity
异常误差补偿前后的姿态误差如图6所示。

图6 (a)方位角误差曲线Fig.6 (a)Azimuth errors before and after information abnormity comprehension

图6 (b)俯仰角误差曲线Fig.6 (b)Pitching errors before and after information abnormity comprehension
从仿真结果可以看出,GNSS信息存在异常值时,通过χ2检验法可以有效抑制异常数据对组合导航的影响,保证系统的姿态测量精度。
(4)姿态保持技术长航时仿真结果
综合考虑时间延迟和信息异常对组合导航的影响。将Δt扩充到系统的状态并利用χ2检验法抑制信息异常的影响后,3h内的姿态角输出误差如图7所示。
从仿真结果可以看出,设计的姿态保持技术通过采用开环修正和闭环修正结合的方式有效减小了惯性器件误差引起的累积姿态角误差,实现了长航时姿态保持,并有效抑制GPS数据传输延迟、GPS信息异常对组合导航的影响。滤波稳定后,俯仰角、滚转角误差≤1′、方位角度误差≤6′,能够满足技术指标要求,数学仿真结果证明了技术的可行性。
3.2 实际飞行数据处理结果分析
采用实际机载飞行数据验证长航时姿态保持技术性能,其基本技术指标为:GNSS速度观测噪声为0.1m/s;系统噪声的设定以50型激光惯组的精度指标为参考。GNSS数据有效起始时间:70s;GNSS对时起始时间:101.09s。
飞行器的运行轨迹如图8所示。

图7 (a)3h方位角误差曲线Fig.7 (a)Azimuth error curve of 3h

图7 (b)3h俯仰角误差曲线Fig.7 (b)Pitching error curve of 3h
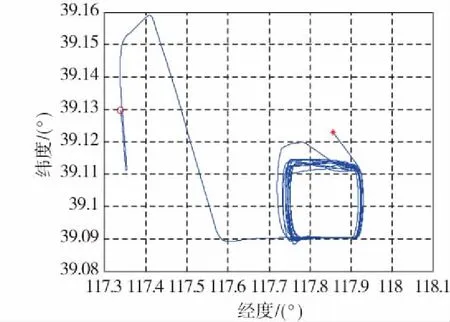
图8 实际飞行轨迹在水平面的投影Fig.8 The horizontal projection of actual flight path
姿态保持算法输出的3个姿态角如图9所示。
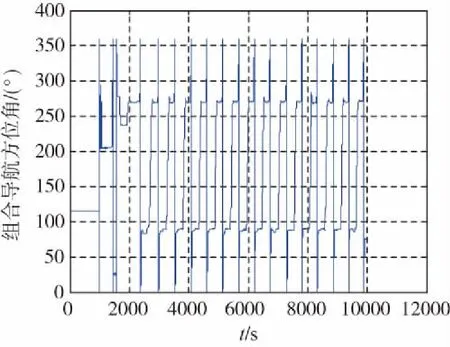
图9 (a)姿态保持算法输出的方位角Fig.9 (a)The Azimuth angle of attitude hold algorithm
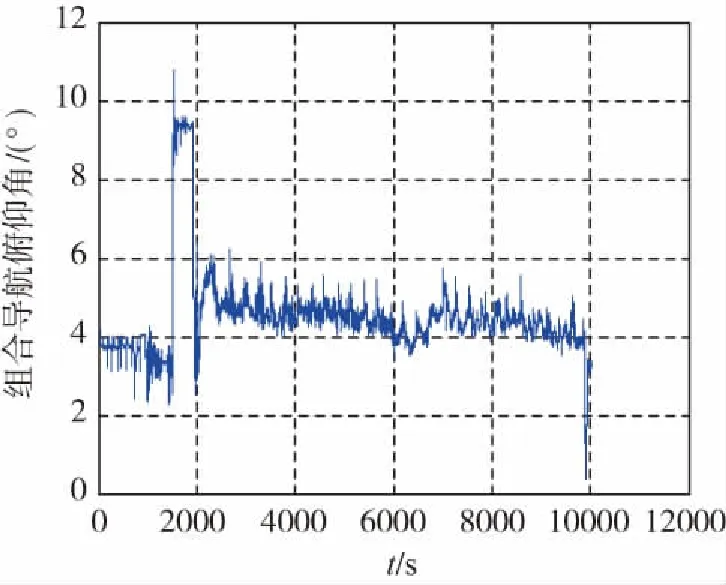
图9 (b)姿态保持算法输出的俯仰角Fig.9 (b)The pitching angle of attitude hold algorithm
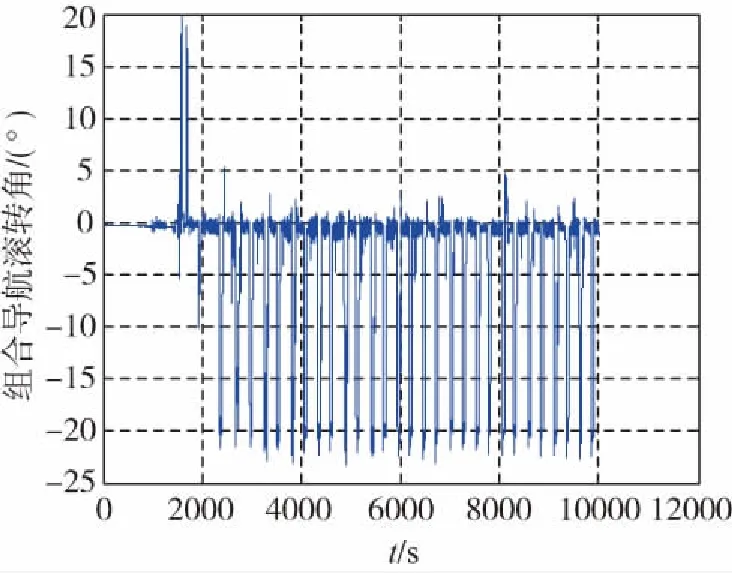
图9 (c)姿态保持算法输出的滚转角Fig.9 (c)The roll angle of attitude hold algorithm
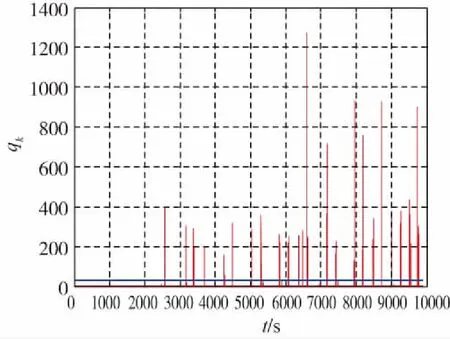
图10 信息异常检验结果Fig.10 The test result of information abnormity
GPS信息异常检测和时间延迟的处理结果如10和图11所示。

图11 时间延迟的估计结果Fig.11 The estimate result of GNSS time-delay
3个失准角的估计结果如图12所示。

图12 (a)北向失准角估计值图Fig.12 (a)The estimate result of north misalignment angle

图12 (b)东向失准角估计值Fig.12 (b)The estimate result of east misalignment angle

图12 (c)天向失准角估计值Fig.12 (c)The estimate result of azimuth misalignment angle
实际飞行试验数据处理结果表明:该组合姿态保持算法能在飞机爬升的过程中完成姿态失准角的估计,开环修正和闭环修正结合的工作方式可以有效抑制姿态误差的发散,空中飞行3h的水平姿态误差≤0.5′、方位角误差≤3′;且该技术能够有效抑制高空环境下GNSS数据异常和时间延迟对姿态计算的影响,能够实现长时间的姿态保持且能够满足高精度姿态基准的指标要求。结合数学仿真的处理结果,验证了姿态保持技术的可行性,可为飞行试验的顺利进行奠定基础。
4 结论
本文主要阐述了一种基于GNSS速度信息辅助姿态保持技术的设计过程。根据数学仿真和实际飞行试验的数据处理结果,主要得出了以下结论:
1)在姿态保持技术系统建模时,对GNSS速度信息的时间延迟进行扩展建模,可以有效估计和补偿时间延迟的影响,使系统的姿态输出更加平稳,满足指标要求;
2)飞行器在飞行过程中,当GNSS信息存在异常值时,通过χ2检验法对GNSS信息的有效性进行判断,可以有效抑制异常数据对组合导航的影响,保证系统的姿态保持精度;
3)该姿态保持技术能在飞机爬升的过程中完成姿态失准角的估计,开环修正和闭环修正相结合的工作方式能够保证系统输出高精度姿态基准;该技术还能够有效抑制高空环境下GNSS数据异常和速度信息的时间延迟对姿态计算的影响,具有较强的抗干扰性。
综上,基于GNSS速度信息辅助姿态保持技术继承了现有的成熟技术,技术方案合理,能够满足飞行器长航时姿态保持的精度需求,可为后续飞行试验提供参考。
[1] Wang X, Wang B, Li H. An autonomous navigation scheme based on geomagnetic and starlight for small satellites[J]. Acta Astronaut, 2012,81(1):40-50.
[2] 王新龙,马闪. 高空长航时无人机高精度自主定位方法[J]. 航空学报,2008,29(S):39-45.
[3] 吴海仙,俞文伯,房建成. 高空长航时无人机SINS/CNS组合导航系统仿真研究[J]. 航空学报,2006,27(2):299-304.
[4] 宁晓琳,蔡洪炜,吴伟仁,等. 月球车的惯性/天文组合导航新方法[J]. 系统工程与电子技术,2011,33(8):1837-1843.
[5] 岳亚洲,张晓冬,田宇,等. 一种新的惯性/天文组合导航方法研究[J]. 光学与光电技术,2008,6(4):89-92.
[6] 于永军. 高空长航无人机多信息融合自主导航关键技术研究[D]. 南京:南京航空航天大学,2011.
[7] 徐帆. 惯性/天文/卫星组合导航方法研究[D]. 北京:北京航空航天大学,2008.
[8] 扈光锋,王艳东,范跃祖. 传递对准中测量延迟的补偿方法[J]. 中国惯性技术学报,2005,13(1):10-14.
[9] 张华强,赵剡,连远峰. 基于自适应概率神经网络的SINS/GPS组合导航系统故障诊断方法[J]. 中国惯性技术学报,2012,20(6):749-753.
[10] 王彬. 飞行器高精度自主组合导航系统技术研究[D]. 北京:北京航空航天大学,2012.
ResearchonAircraftAttitudeHoldSchemewithGNSSVelocityInformation
WANG Bin, SHEN Liang-liang, SHAO Hui-bing
(Beijing Institute of Control amp; Electronic Technology, Beijing 100038, China)
In order to improve the precision attack ability and investigation detection ability of aircraft, toward the attitude hold problem of high precision, long endurance and high reliable of aircraft navigation system, an aircraft attitude hold scheme with GNSS velocity information is proposed. The combination of open-loop correction and closed-loop correction is adopted to suppress filter precision decline due to inertial navigation error which accumulates with time. Theχ2test method is used to avoid GNSS information abnormity during high maneuver fight and external disturbances and to ensure the validity of GNSS infomation. The extensible modeling on time-delay of GNSS velocity information is used to restrain the influence of time-delay of GNSS velocity information on attitude hold algorithm. The simulation and data processing results demonstrate that, based on the advantages of GNSS and INS(inertial navigation system), the attitude hold scheme meets the requirement of high precision, long endurance and high reliable attitude hold of aircraft, which has a favorable engineering value.
GNSS; Aircraft; Attitude hold*
10.19306/j.cnki.2095-8110.2017.06.008
V249.32
A
2095-8110(2017)06-0049-07
2017-05-02;
2017-06-26
王彬(1987-),男,硕士,工程师,主要从事惯性导航技术研究。E-mail:wangbinbuaa@126.com
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
电子制作(2018年2期)2018-04-18
百科探秘·航空航天(2016年9期)2016-12-01
诗选刊(2015年4期)2015-10-26
太空探索(2015年5期)2015-07-12
小朋友·快乐手工(2015年5期)2015-06-06
阅读(中年级)(2009年11期)2009-04-14
