单通道旋转弹一体化制导控制系统设计
2017-12-06 03:35谢浩怡翟文军张文景
兵器装备工程学报 2017年11期
谢浩怡,翟文军,张文景
(豫西工业集团有限公司, 河南 南阳 473000)
单通道旋转弹一体化制导控制系统设计
谢浩怡,翟文军,张文景
(豫西工业集团有限公司, 河南 南阳 473000)
采用一对鸭舵同时完成俯仰和偏航通道的一体化控制,避免了传统设计方法的不稳定性。以一类单通道旋转弹为研究对象,在其运动模型的基础上,设计一体化反演滑模制导控制系统并进行了数值仿真验证,证明了一体化反演滑模制导控制系统的有效性。
单通道;旋转弹;制导控制一体化;反演滑模
在对目标精确打击过程中起决定因素的是导弹武器的制导和控制系统。采用传统的分离设计方法时,制导系统和控制系统在飞行末段存在固有的不稳定性。一体化设计方法是将制导系统和控制系统统一到一个大环节进行设计,利用弹目相对运动和弹体的状态信息直接产生控制机构的偏转指令,以控制导弹的飞行和实现对目标的打击[1]。
从国内外学者20世纪八九十年代开始研究以来,一体化技术日渐成熟,取得了丰富成果。在早期研究中,Lin[2-3]率先针对由空气舵与直接侧向力复合控制的旋转弹应用了最优一体化控制方法。为了实现非线性制导控制一体化系统模型的线性化,Hughes等[4]对初始弹目视线非线性系统进行了线性化处理,简化了控制系统。随着控制理论研究的发展和深入,越来越多的先进控制理论被应用到制导控制一体化设计当中,包括H∞理论、滑模变结构控制理论、自适应控制理论等。Shima等[5]把导弹的零效脱靶量设定为滑模面,通过引入可以测量或者计算得到的目标加速度建立制导控制一体化模型,为导弹的制导控制一体化设计方法提供了参考。Idan等[6]对于具有固定尾翼和俯仰舵的导弹以攻角指令为滑模面制定了一体化制导控制律,这种一体化控制律能够保证弹体攻角在有限时间内跟踪控制指令,增强了导弹的机动响应速度和稳定性。
针对单通道旋转弹,结合反演设计方法和滑模控制理论设计了一体化制导控制系统[7],并进行了弹道仿真验证;为提高同类型单通道控制旋转弹的制导控制和总体性能提供了理论依据,同时也可为其它类型飞行器的一体化制导控制系统提供借鉴。
1 一体化模型建立
1.1 弹目运动模型建立
弹目运动关系由公式得出:
(1)


(2)

(3)
1.2 一体化模型建立
应用基于欧拉角建立的运动方程,基于以下假设,设计弹道、姿态的解算和控制系统[8]:
假设1:小扰动假设;
假设2:导弹的舵面升力足够小,将目标机动与舵片产生的升力均纳入扰动项;在导弹进入末制导后无推力作用。
结合弹目相对运动方程(3),得到导弹纵向通道一体化模型[9]:
(4)
若分别记:


那么一体化模型可以简化成如下格式:
(5)
可见,该系统是一个具有级联形式的不确定系统,Δ1和Δ2为非匹配不确定部分,Δ3为匹配不确定部分。
2 一体化控制器
要实现制导的目标即VP→0,需要设计控制器使得x1→0。

定义滑模面为[11]
si=xi-xic,i=1,2,3
(6)

f1(x1)+s2+x2c+Δ1
(7)
根据滑模控制条件得:
(8)
其中,k1gt;0为设计参数。

(9)
(10)
类似第一步,对第二个子系统进行设计。根据滑模控制的条件得到:

(11)
(12)
类似前两步,根据滑模控制的可达到条件得到:

(13)
(14)
可见整个系统是稳定的[12]。
由式(6)、式(8)、式(11)、式(13)可得到控制器满足方程:
(15)

3 控制效果仿真
基于正弦式连续型单通道控制模型,结合所设计的滑模一体化制导控制模型,设计俯仰和偏航通道的一体化控制器[13],确保仿真控制效果。通过分析导弹飞行过程中各参数变化情况,验证所设计的一体化控制器的有效性。
超音速目标弹道:目标运动速度500 m/s,遭遇点H×R=3 km×6 km。
一体化控制参数选择:r1=0.2;k1=17;r2=0.2;k2=19;r3=0.1;k3=22。
导弹进入导引头范围内,启动末制导,进行对目标的打击。本仿真中导引头的有效范围为6 km。其全弹道仿真结果如图1所示。一体化制导控制系统最终的脱靶量仿真结果如图2所示,由图可见其中最终脱靶量为0.719 m,攻击时间为16.4 s。
图1 全弹道仿真
图2 脱靶量仿真
全弹道飞行中,舵偏指令仿真结果如图3所示。从图中可以看出进入末制导后需用舵偏角由于导弹和目标相对距离的减小而显著增加。全弹道实际舵偏角仿真结果如图4所示。其为弹体坐标系下表示的舵偏指令,变化频率与弹旋频率一致。通过舵偏指令求出需用过载,然后求出需用控制力,进而求出需用等效控制力[14],可以看出,舵机给出的舵偏指令为幅值和相位变化的正弦曲线,符合旋转弹控制的实际情况。
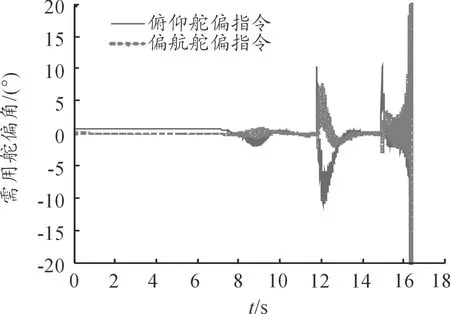
图3 全弹道舵偏指令仿真
全弹道仿真中的欧拉角(俯仰角、偏航角和滚转角)仿真结果如图5所示,在弹体飞行过程中,偏航角基本保持不变,俯仰角变化幅度较小。
全弹道攻角变化情况的仿真结果如图6所示。
全弹道仿真过程中过载如图7、图8所示,可以看出过载在接近目标时才超出最大过载范围。
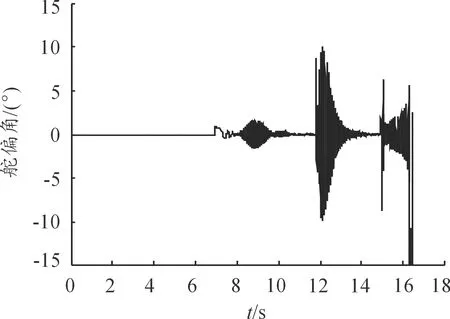
图4 全弹道实际舵偏角仿真
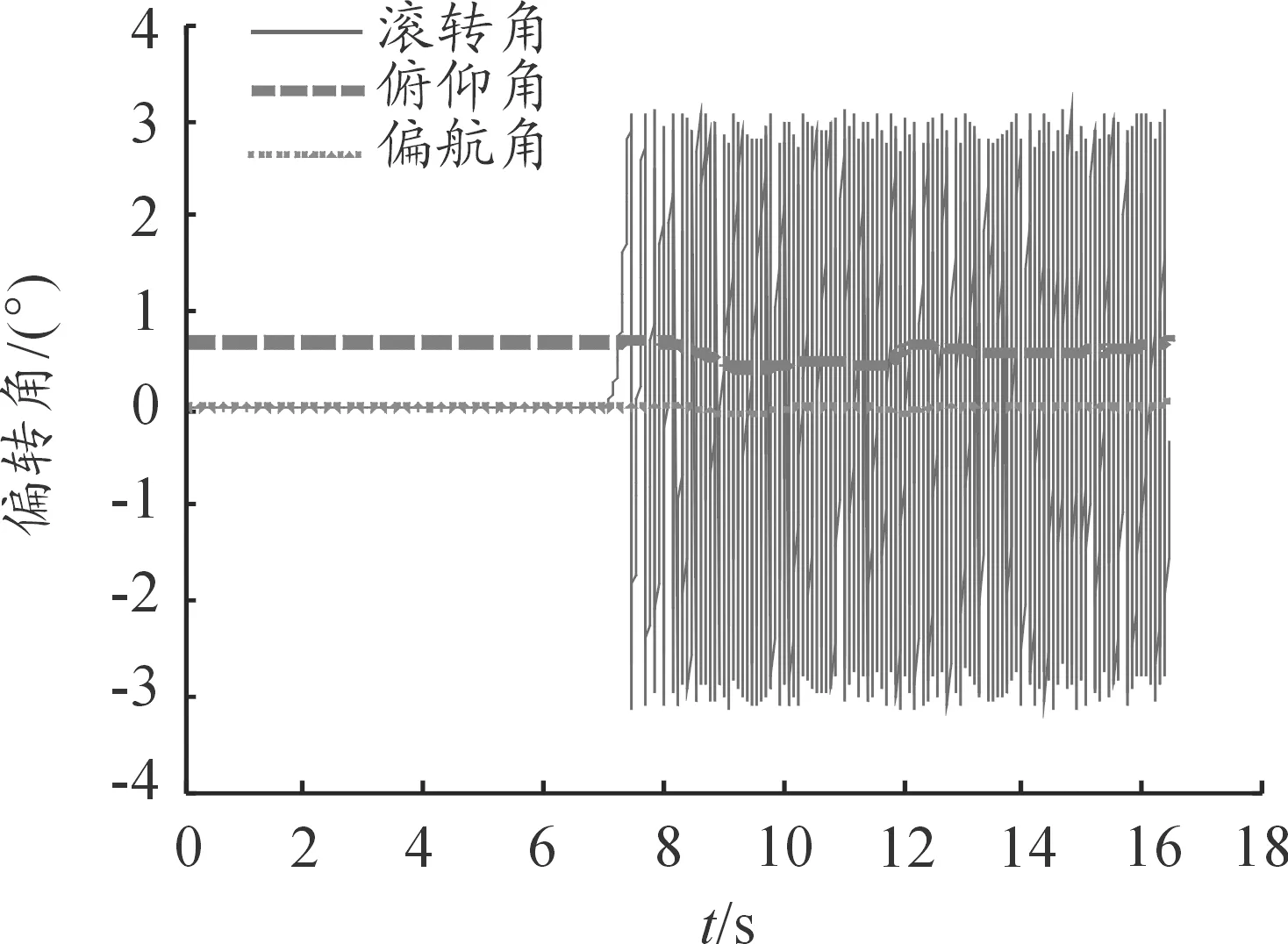
图5 全弹道欧拉角仿真
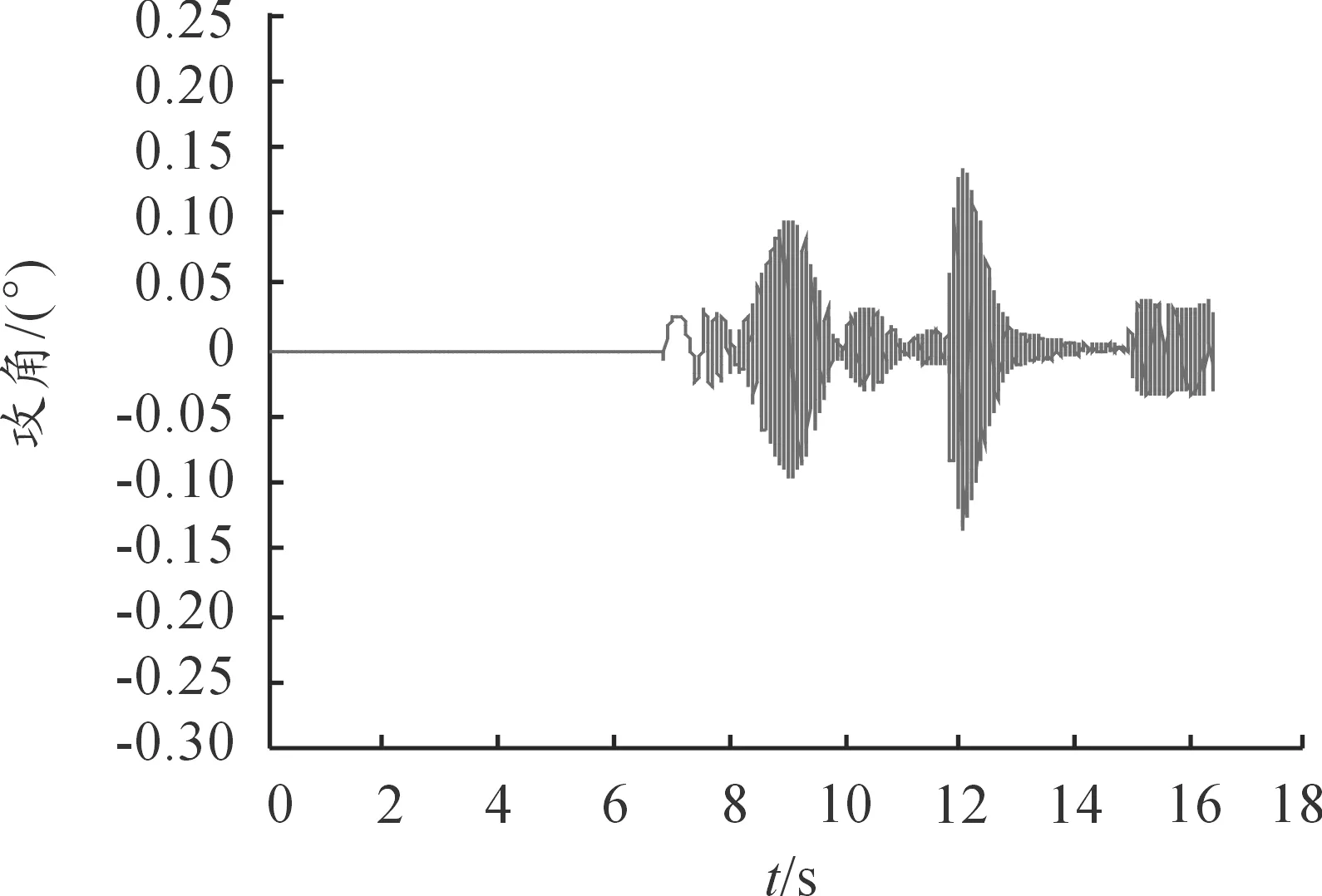
图6 全弹道攻角仿真
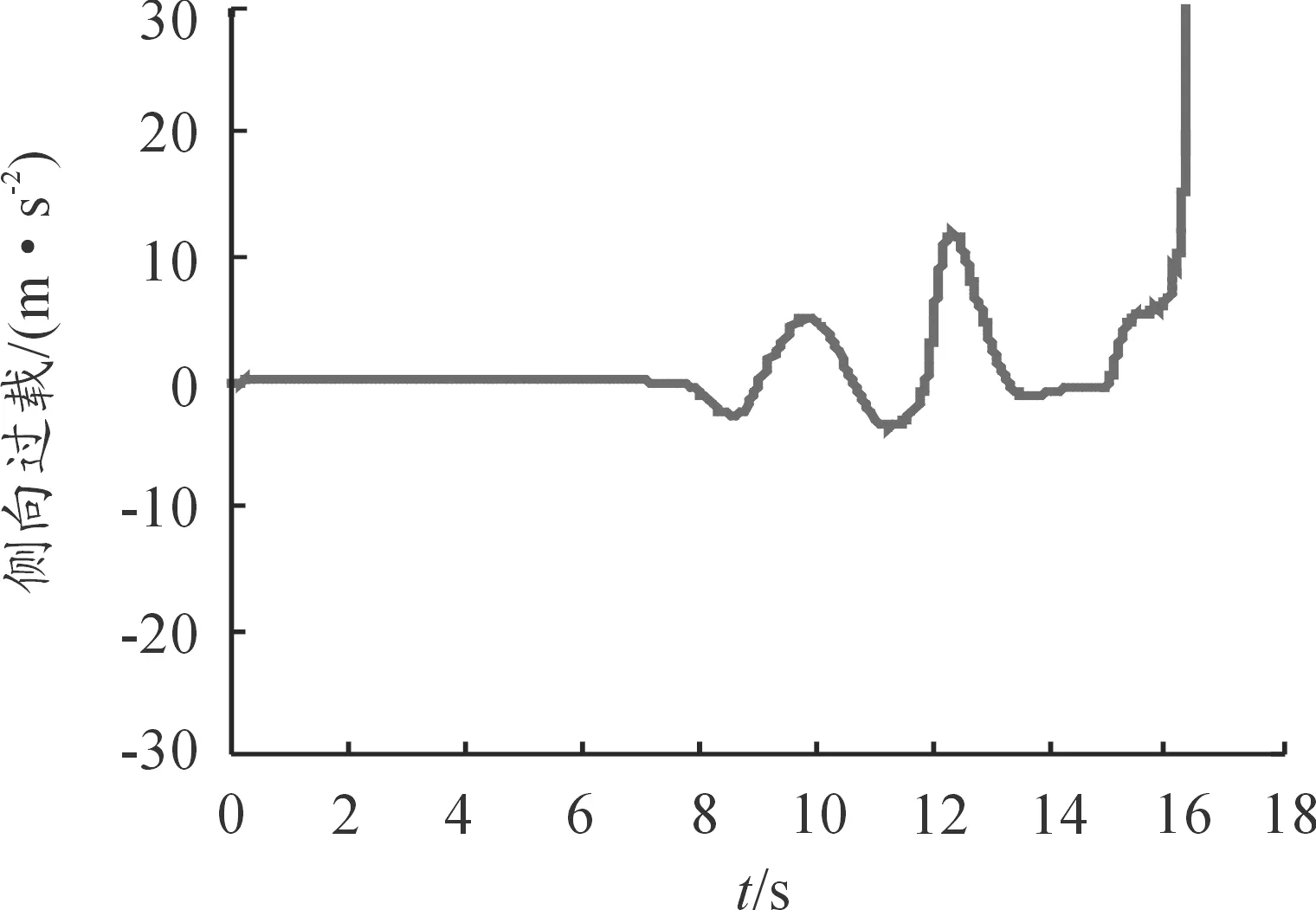
图7 全弹道切向过载仿真
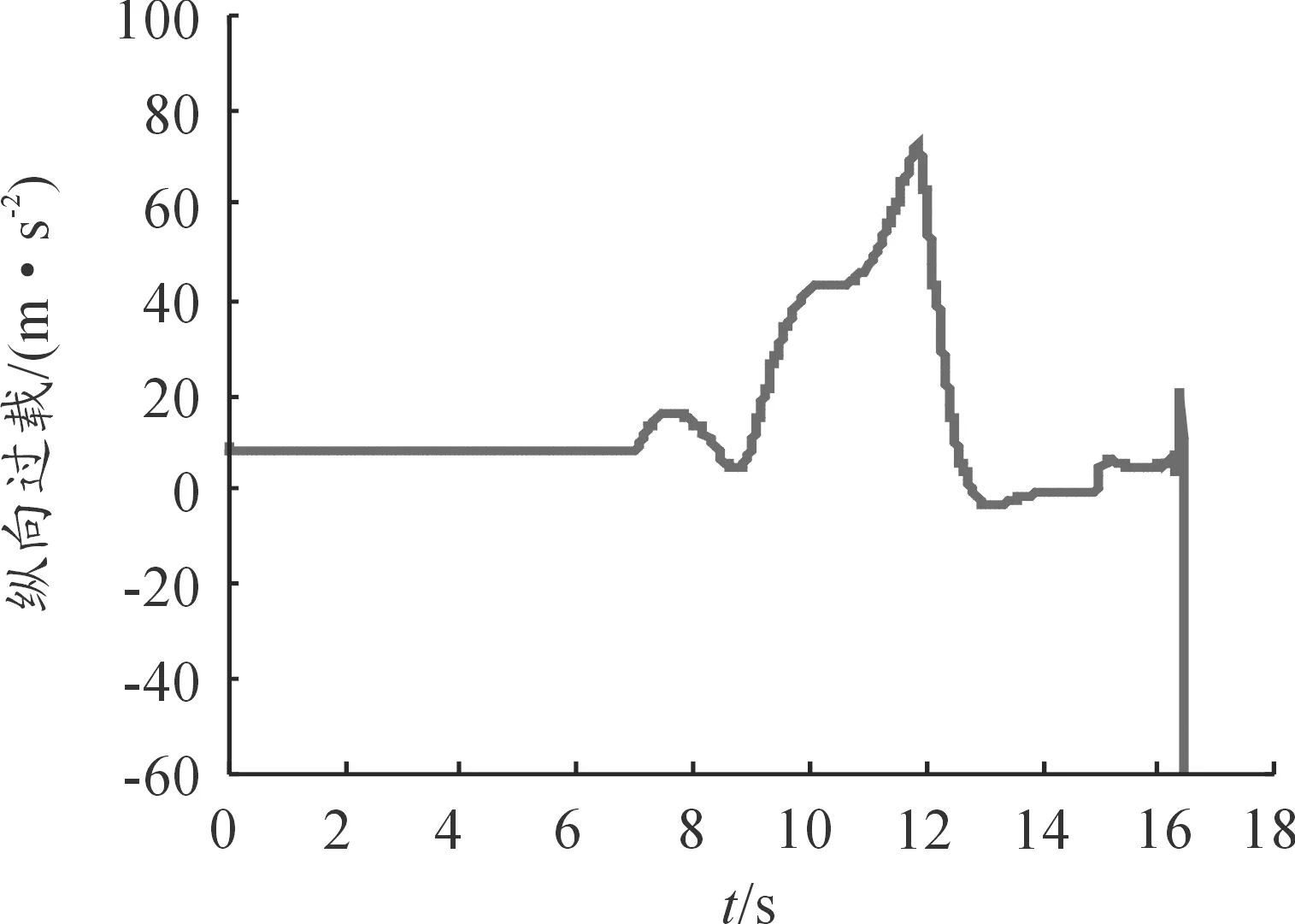
图8 全弹道法向过载仿真
仿真结果表明一体化制导控制系统在打击超音速目标时的控制效果满足要求,脱靶量在允许范围内,说明本文设计的一体化制导控制系统是有效的。
4 结论
1) 通过数值仿真验证了一体化反演滑模制导控制系统具有较强的控制效率和控制能力且具有较好的稳定性。
2) 目前尚未考虑刚体模型下其他因素诸如弹道风、推力偏心、质量偏心等对火箭弹飞行控制效果的影响以及由于旋转造成的俯仰和偏航耦合效应,未来可以考虑在一体化制导控制系统设计中,结合多种控制方法,如滑模变结构和神经网络自适应控制方法相结合,以设计稳定性和鲁棒性更强的一体化制导控制系统。
[1] WILLIAMS D E,BROY D J,FRIODLAND B.Design of an integrated strapdown guidance and control system for a tactical missile[C]//AIAA paper.New Jersey,USA:1983.
[2] LIN C F,WANG Q,SPAYER J L,et al.Integrated estimation,guidance,and control system design using game theoretic approach[C]//Proc.American Control Conf.,American Automatic Control Council.Evanston,USA:1992.
[3] LIN C F,OHLMEYER E,BIBEL J E,et al.Optimal design of integrated missile guidance and control[C]//Proc.of the World Aviation Conf.Anaheim,USA:1998.
[4] IDAN M,SHIMA T.Integrated sliding mode guidance and control for a missile with on-off actuators[J].Journal of Guidance,Control,and Dynamics,2007,30(4):1081-1089.
[5] HUGHES T L,MCFARLAND M B.Integrated missile guidance law and autopilot design using linear optimal control[C].Proc.AIAA Guidance,Navigation,and Control Conf.,2000,Denver,USA.
[6] IDAN M,SHIMA T,GOLAN O M.Integrated sliding mode autopilot-guidance for dual-control missiles[J].Journal of Guidance Control and Dynamics,2007,30(4):1081-1089.
[7] 谢浩怡.单通道旋转弹制导控制一体化设计方法研究[D].北京:北京理工大学,2015.
[8] 钱杏芳,林瑞熊,赵亚男.导弹飞行力学[M].北京理工大学出版社.2000.
[9] 马学龙,葛致磊.旋转弹制导控制一体化设计技术[C]//战术武器飞行控制发展研讨会会议论文集.上海:2013.
[10] CHOI J Y,CHWA D K,CHO H P.Nonlinear adaptive guidance considering target uncertainties and control loop dynamics[C]//Proc.Ameri.Contr.Conf.2001,USA.
[11] 陈志梅,王贞艳,张井岗.滑模变结构控制理论及应用[M].北京:电子工业出版社,2012.
[12] 乔继红.反演控制方法与实现[M].北京:机械工业出版社,2012.
[13] 尹永鑫,杨明,王子才.导弹三维制导控制系统一体化设计[J].黑龙江大学自然科学学报,2007,24(4):430-434.
[14] 宋晗,王淼.单通道旋转导弹运动学建模方法研究[J].科技信息,2010,19:27-29.
(责任编辑周江川)
DesignofIntegratedGuidanceandControlforaSpinningMissilewithonePairofCanards
XIE Haoyi, ZHAI Wenjun, ZHANG Wenjing
(Yuxi industries group CO., LTD, Nanyang 473000, China)
This paper adopts one pair of duck rudders accomplishes control of pitching and jaw channel effective to avoid the inherent instability of traditional system. This paper takes a kind of single-channel controlled spinning missile as research object. The simulation of integrated back-stepping sliding mode guidance control system is designed and verified by numerical simulation on the basis of it’s pitching motion model. The results verify the effectiveness of the integrated back-stepping sliding mode guidance control system.
single-channel; spinning missile; integrated guidance and control; back-stepping sliding mode
2017-07-04;
2017-08-15
谢浩怡(1990—),男,硕士,工程师,主要从事飞行器动力学与控制研究。
装备理论与装备技术
10.11809/scbgxb2017.11.014
本文引用格式:谢浩怡,翟文军,张文景.单通道旋转弹一体化制导控制系统设计[J].兵器装备工程学报,2017(11):65-68,80.
formatXIE Haoyi,ZHAI Wenjun,ZHANG Wenjing.Design of Integrated Guidance and Control for a Spinning Missile with one Pair of Canards[J].Journal of Ordnance Equipment Engineering,2017(11):65-68,80.
TJ765.2
A
2096-2304(2017)11-0065-04
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
小哥白尼(趣味科学)(2022年3期)2022-06-09
大电机技术(2022年2期)2022-06-05
成都信息工程大学学报(2021年4期)2021-11-22
数字海洋与水下攻防(2020年5期)2021-01-04
防爆电机(2020年4期)2020-12-14
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
中国科技纵横(2017年15期)2017-09-09