
基于改进人工势场法的动态避障研究
2017-12-02 03:03河北大学电子信息工程学院王培光宗晓萍
电子世界 2017年22期
河北大学电子信息工程学院 陈 珊 王培光 宗晓萍
基于改进人工势场法的动态避障研究
河北大学电子信息工程学院 陈 珊 王培光 宗晓萍
针对人工势场法对于传统智能车动态避障过程中存在的目标点不可达和陷入局部最优解问题,将传统人工势场法进行改进,加入约束条件,重新构建目标点引力场和目标点斥力场,并引入虚拟局部区域,解决目标点不可达和局部最小点问题,完成动态准确避障行为,仿真实验验证了此方法的有效性。
人工势场法;目标不可达;局部最小点;动态避障
1.引言
随着社会的不断进步和科学技术的不断向前发展,动态避障技术已经应用于生产和生活的方方面面:在交通领域,无人机,无人车,无人船的自主驾驶方面,不仅可以缓解当前城市交通系统的交通拥堵问题,而且可以降低人们由于驾驶疲劳和烦躁所引发的交通事故,减少交通事故死亡率和受伤人数;在军事领域,随着科学技术的发展,各国军事实力不断增强,在当前国际政治局势不断紧张和升级的今天,敌情探测技术的发展显得尤为重要,在敌情探测中,准确获取敌军情报信息,能巧妙躲避动态障碍物,实现敌军情报的实时传输对于整个敌情勘探尤为重要;在工业化生产的工厂和无人化自动生产车间,小到各个零部件之间的相互传送,大到车间内危险仪器的故障维修,都需要动态避障系统作为其行为的技术支撑。动态避障系统应用如此广泛,对其算法的要求也越来越高[1-4]。
最初,复杂环境下的动态避障算法是BUG法,但由于BUG法未将动力学等因素考虑进算法中,实验验证难以在复杂环境中得到广泛应用,随后向量场直方图法,可视图法,自由空间法,人工势场法等避障算法相继出现,并在复杂动态环境的避障问题中得到了广泛的应用,随着人工智能的不断发展,神经网络法,遗传算法等算法也得到运用,但不论哪一种算法都存在诸多优点和不足。在如此多的动态避障算法中,人工势场法其算法本身结构简单,易于实现,便于实现底层的实时控制因而在复杂环境动态避障系统中得到了十分广泛的使用,但人工势场法本身也存在当障碍物与目标点距离过近时出现目标不可达和陷入局部最小点等问题。为此,国内外专家学者做了大量研究,对传统的人工势场法进行改进,并取得了显著的研究成果。 Mabrouk等人将运动内部的主体状态加入到传统算法中,将传统算法进行改进以解决传统算法存在的局部最小点问题;AZLIS,KLEEMANL提出沿墙跟踪方法来解决传统人工势场法目标点不可到达问题;Gregory Dudek,Michael Jenkin等提出将模糊控制算法与传统算法进行结合作出相应的运动路径规划,结合两种算法的优点,将传统算法得到的数据输入到模糊控制算法的输入控制器中从而解决传统算法存在的局部极小值问题;Zhang M K,Li L S将杂草算法应用到传统算法中;刘满禄等利用匀强电场模拟带电粒子运动;鲁新军等通过虚拟水流法和传统算法结合;程拥强等通过让机器人按照圆弧轨迹躲避障碍物提出极限环法;王萌等将传统人工势场法中加入相对距离,重新定义引斥力场函数等方法对传统势场法存在的问题进行逐一改进[5-9]。
本文一方面结合国内外专家学者对于人工势场法的改进成果,另一方面根据目标点和智能车相对位置和相对速度重新建立引力势能场和引力函数,根据障碍物和智能车的相对角度,相对速度和相对加速度重新定义斥力势能场和斥力函数,使其完成避障行为,同时在局部最小点附近引入虚拟局部区域,解决目标点不可达和局部最小点问题,完成动态准确避障行为。
2.基于人工势场法的动态避障算法
传统的人工势场法的定义如下:在复杂的动态避障环境中为机器人建立由引力势场和斥力势场构成的虚拟势场。机器人在虚拟势场中的受力情况如图1所示。引力势场表示目标点对于机器人的吸引作用,自始至终都存在,即Fg,其受力方向处于机器人与目标点的连线,并指向目标点;与引力势场不同的是,在复杂的动态环境中,当机器人运行到障碍物对机器人的影响范围内才产生斥力势场,即Fo,其受力方向为机器人和障碍物连线并指向远离障碍物的一方。将机器人所受目标点的引力Fg和障碍物的斥力Fo进行合力运算叠加得到整个虚拟势场[10]。
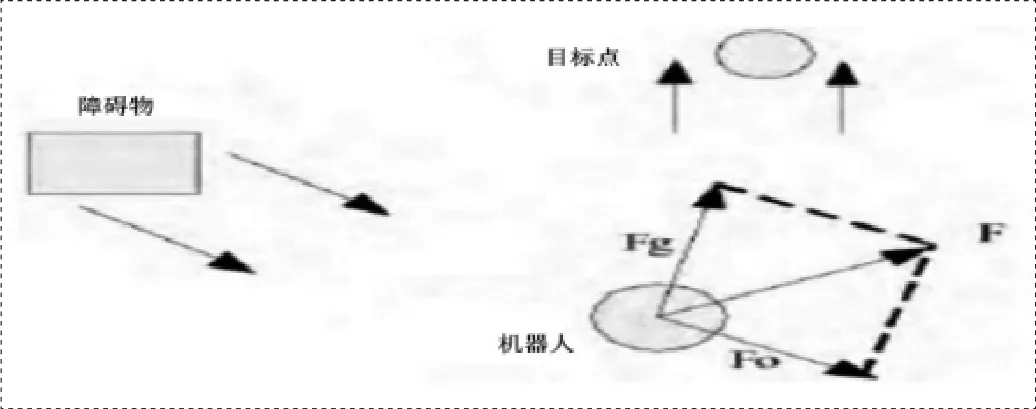
图1 机器人在虚拟势场中的受力情况
2.1 目标点引力场
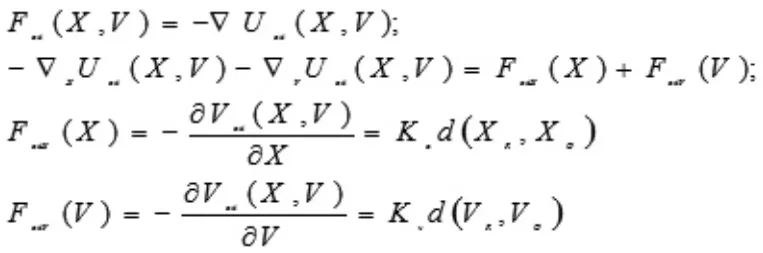
首先将机器人的工作范围定义在平面区域,排除非平面运动(机器人在楼梯上下运动),设机器人其初始位置点 P = ( x,y)。在虚拟势场中,引力场一直存在于机器人到达目标位置之前的时刻,机器人离目标位置越远其对机器人端引力越大,即成正比关系。因此引力势能函数如下:

Eattp(P)—引力势场的正比例增益系数;P—机器人移动的相对位置;Pgoal—目标点位置;m—可调控参数;P—Pgoal—机器人与目标点之间的欧几里得距离。由于机器人将沿势场下降的方向进行路径寻迹,即对引力势函数求负梯度可得到相应引力,即:

2.2 障碍物斥力场
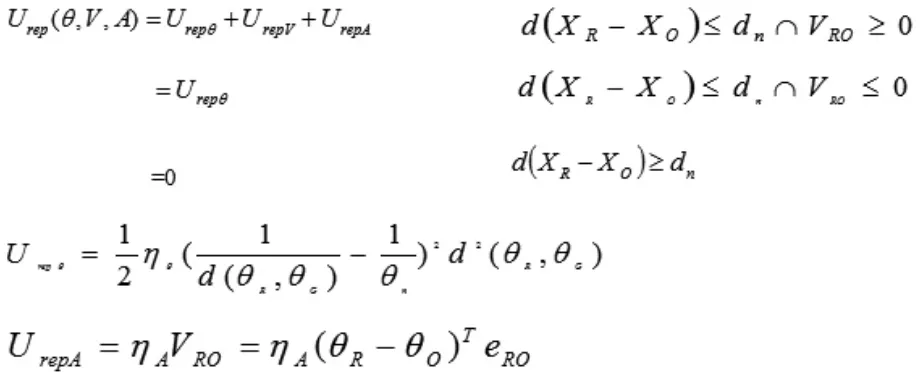
定义:机器人在平面工作(不考虑上下楼梯的情况),设机器人的位置为 P = ( x,y),当机器人在障碍物影响距离范围内时,斥力的大小和障碍物与机器人之间的距离成反比,因此斥力势能函数可表示为:

当(P—Pobs) ≤d0;其余情况均为0。
同理可得斥力为:

Krep—斥力势场正比例增益系数;a—可调参数;Pobs—障碍物的位置;(P—Pobs)—机器人和障碍物之间的欧几里得距离;d0—单个障碍物对机器人影响的最大距离,此参数是综合考虑机器人本身的性能、速度、障碍物大小预先设定的。当机器人与某单个障碍物之间的距离大于d0时,机器人与该障碍物之间的斥力则会消失。
如目标点的周围有障碍物且其位置在影响范围之内,这种情况下,机器人前进,其与障碍物的距离越小斥力就越大,随着机器人不断向目标点前进,机器人与目标点的距离不断缩小,引力也在不断减小并且远小于斥力,机器人就只能在目标点附近徘徊进入“死循环状态”[11]。
3.基于改进人工势场法的动态避障算法
3.1 改进人工势场法的总体架构
针对人工势场法对于传统智能车动态避障过程中存在的目标点不可达和陷入局部最小点问题,将传统人工势场法进行改进根据目标点和机器人相对位置和相对速度重新建立引力势能场和引力函数,根据障碍物和机器人的相对角度,相对速度和相对加速度重新定义斥力势能场和斥力函数,使其完成避障行为,同时在局部最优解附近引入虚拟局部区域,解决目标点不可达和局部最优解问题,完成动态准确避障行为,其算法流程图如图2所示。
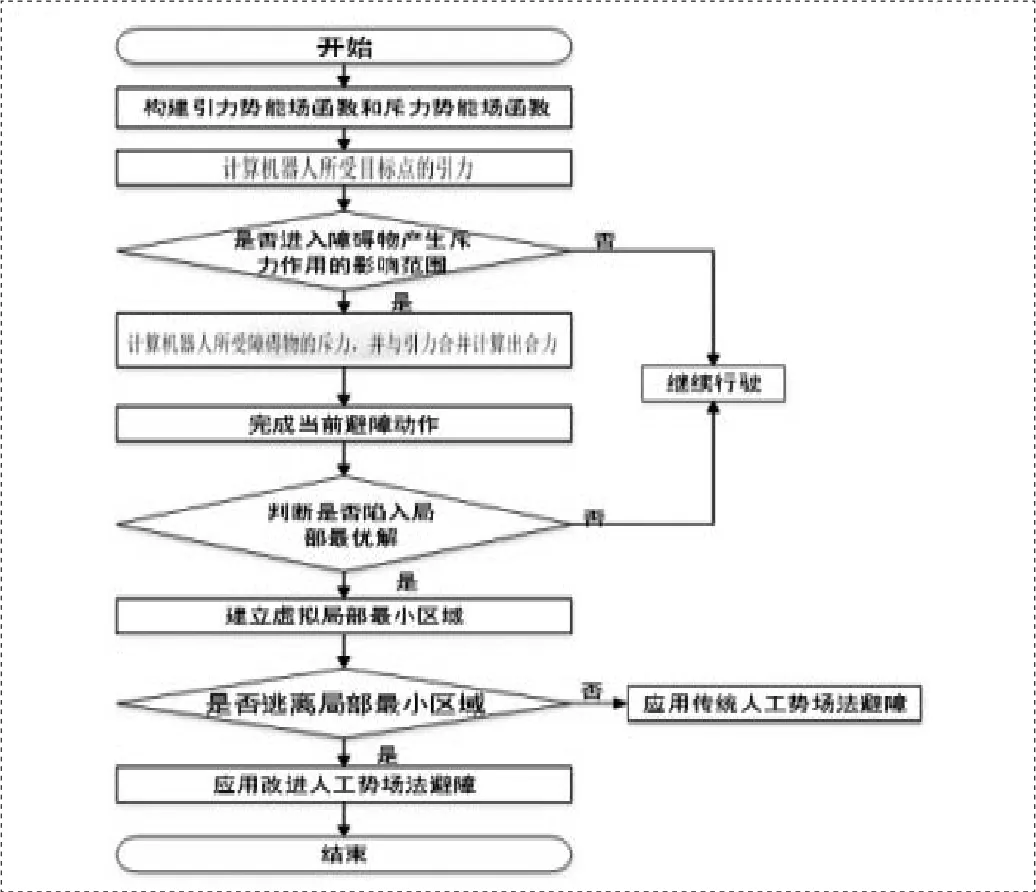
图2 改进人工势场法流程图
3.2 改进人工势场法的具体步骤
(1)构建新的引力势场和引力函数,考虑机器人和目标点的相对位置和相对速度;

(2)计算机器人所受目标点引力;
(3)构建新的斥力势场和斥力函数,考虑机器人和障碍物的相对角度,相对速度和相对加速度;
(4)引入局部虚拟最小区域:

给机器人设置一个局部的最小区域如下图3,此区域是由局部最小点A作为圆心,参数r作为半径所构成的。机器人没有离开局部最小区域时,需要一直采用改进的人工势场算法进行动态避障;机器人离开局部最小区域后,进行判断是否需要运行改进人工势场法。
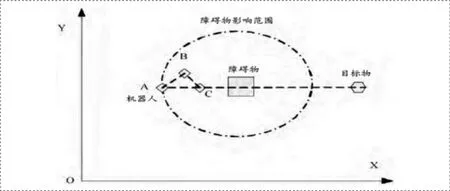
图3 局部最小区域示意图
4.实验仿真
为了验证本文提出的算法的有效性,将上述算法用Matlab进行仿真,在仿真过程中主要改进算法解决传统高人工势场法存在的两个问题:目标不可达和局部最小点,并将两组实验结果进行比较,改进人工势场法在复杂环境中的动态避障效果更好。
为了使实验结果更加直观,将仿真图网格定义为1m*1m,经过多次实验,选定为r=0.25m的圆形机器人,Vmax=1.5m/s,斥力场增益系数d0=3,k0=8,引力场系数a0=1,机器人最初位置坐标为(0.5,0.5),到达点位置坐标为(7,6),两种算法的仿真图分别为图4和图5。
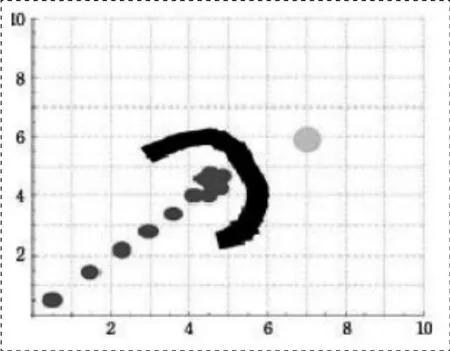
图4 传统人工势场法仿真图
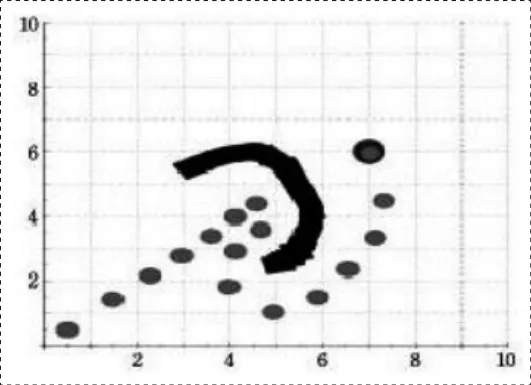
图5 改进人工势场法仿真图
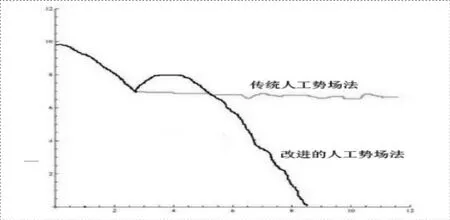
图6 两种算法波动图比较
由图4和图5比较可知,在复杂的动态环境中,机器人运动到局部最小点附近时,在传统人工势场法的作用下,机器人会在最小点的某一范围内移动一范围内移动,无法准确移动到目标点;而改进算法后通过在最小点附近建立局部虚拟区域,使机器人脱离最小值陷阱,到达目标点。图6为两种算法的波动图比较,从图中可以看出,它在距离波动及花费时间上要远大于在最小点附近建立局部虚拟区域的方法,而传统算法啊在机器人到达目标位置附近停滞不前,总是处于波动的状态,由此可见改进算法后机器人可以在复杂环境中快速完成动态避障到达目标位置。
5.结论
本文将人工势场法算法进行改进,加入障碍物的相对速度和加速度以及障碍物的角度作为约束条件重新定义引力场函数和斥力场函数,同时在局部最优解附近建立虚拟斥力场,解决传统人工势场法陷入局部最优解无法达到动态准确避障的目的,并通过仿真验证了此算法的可行性,但是改进的人工势场法存在参数精度低,跳出局部最优解和局部最小区域时间过长等问题还需后续改进和解决。
[1]徐国华,谭民.移动机器人的发展现状及趋势[J].机器人技术与应用,2001:(3):7-8.
[2]孝文.机器人发展的三大趋势[J].科技潮,2008(6):30-31.
[3]Davison A J,Kita N.3D simultaneous localization and map-building using active vision for a robot moving on undulating terrain[C].Computer Vision and Pattern Recognition.Proceedings of IEEE Computer Society Conference,vol.1,2001:284-391.
[4]曹祥康,谢存禧.我国机器人发展历程[J].机器人技术与应用,2008(5):44-46.
[5]王志文,郭戈.移动机器人导航技术现状与展望[J].机器人,2003,25(5):470-474.
[6]于红斌,李孝安.基于栅格法的机器人快速路径规划[J].微电子学与计算机,2005,22(6):98-100.
[7]姜志兵,赵英凯.基于虚力栅格法的移动机器人实时避障和导航[J].机床与液压,2007,35(5):91-93.
[8]王仲民.移动机器人路径规划及轨迹跟踪问题研究[D].河北工业大学博士论文,2006:41-76.
[9]Mabroutk,Mohamed M,McInnes C R.Solving the potential field local minimum problem using internal agent states[J].Robots and Autonmous Systems,2008,56(12):1050-1060.
[10]Wen Yong,Zhang Huai-xiang,Zeng Hong.Research on Obstacle Avoidance od Mobile Robots Based on a New Potential Field[J].Journal of Hangzhou Dianzi University,2009,29(1):50-53.
[11]Wang Meng,Wang Xiao-rong,Li Chun-gui.Study of local path planning of mobile robot based on improved artificial potential field method[J].Computer Engineering and Design,2008,29(6):1504-1506.
陈珊(1993—),河北廊坊人,硕士,现就读于河北大学。
宗晓萍(1965—),河北保定人,博士,教授,主要研究方向:智能控制及混合动态系统、机器人视觉伺服控制、智能物流仓储协调控制。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
高技术通讯(2021年5期)2021-07-16
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
石油地球物理勘探(2017年4期)2017-12-18
初中生(2017年3期)2017-02-21
系统工程与电子技术(2016年4期)2016-08-24
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
第二课堂(课外活动版)(2015年4期)2015-10-21
城市道桥与防洪(2014年5期)2014-02-27
