
基于工况识别与多元非线性回归优化的能量管理策略
2017-12-02 01:58林歆悠林国发
中国机械工程 2017年22期
孙 蕾 林歆悠 林国发
1.华侨大学机电及自动化学院,厦门,3610212.福州大学机械工程及自动化学院,福州,3500023.上汽集团技术中心,上海,201804
基于工况识别与多元非线性回归优化的能量管理策略
孙 蕾1林歆悠2林国发3
1.华侨大学机电及自动化学院,厦门,3610212.福州大学机械工程及自动化学院,福州,3500023.上汽集团技术中心,上海,201804
为给混合动力汽车智能管理策略提供基础,开展了基于学习向量化(LVQ)神经网络的工况模式识别算法研究。选取4种典型微观道路类型工况和3类标准循环工况,提取11个参数为训练特征数据,建立了LVQ神经网络工况模式识别算法;在此基础上,以某款混联式动力系统为例,结合多元非线性回归分析制定相应控制策略;最后,基于Simulink仿真平台建立LVQ神经网络工况模式识别及整车仿真模型,分别采用中国城市典型循环工况以及构建UDDS+NYCC+UDDS的标准行驶工况进行道路工况识别验证。结果表明,所建立的LVQ神经网络工况识别算法可以准确识别工况模式并能有效提高能量管理策略的控制效果。
学习向量化神经网络;工况识别;循环工况;能量管理
0 引言
随着新能源汽车能量管理策略的研究不断深入,行驶工况对新能源汽车的性能影响非常重要,因此这个方向已成为目前的研究热点,如林歆悠等[1]采用工况识别与动态规划全局优化相结合的方法建立混联式混合动力客车的优化策略,类似的研究还有PARK等[2]通过机器学习算法对行驶道路及交通状况进行识别进而优化控制参数以进一步提升混合动力汽车的控制效果。
关于工况识别的研究,目前基本有两种方法,一种是采用统计方法,利用历史数据进行统计识别[3],但该方法识别精度不够稳定,对突变的工况无法准确识别;另一种是采用智能算法[4-6],如詹森等[7]采用基于遗传优化K均值聚类算法进行工况识别,但该方法计算量大且需要对识别规则进行不断重复调整,稳定性较低。另外,还有关于微观道路方面的研究,如石琴等[8]采用基于运动学片段的方法对城市道路进行识别。
本文拟采用学习向量化(learning vector quantization, LVQ)神经网络分别对行驶道路类型与综合行驶工况进行识别,并在此基础上以某款混联式动力系统为例,结合多元非线性回归分析制定相应控制策略。
1 工况识别特征参数提取
工况识别的基础是对工况特征参数的提取。工况特征参数的提取原则是包含每个循环工况的特征,但是工况特征选择过多会导致计算量的增大;特征参数选择过少又会导致工况识别的误差较大,影响识别的精度。根据文献[9]的研究成果,本文选择如下具有代表性的11个特征参数:
(1)
式中,vg为每个时刻的循环工况车速;tg为整个循环工况的时刻数。
(2)循环工况的最高车速vgmax
vgmax=maxvg
(2)
(3)循环工况的最大加速度agmax
agmax=maxag
(3)
式中,ag为循环工况的加速度。
(4)
(5)循环工况的最大减速度dgmax
dgmax=maxdg
(5)
式中,dg为循环工况的减速度(加速度为负值)。
(6)
(7)怠速时间比例ri,即工况怠速的时间在整个循环工况总时间中所占的百分比。
(8)加速时间比例ra,即工况加速的时间在整个循环工况总时间中所占的百分比。
(9)减速时间比例rd,即工况减速的时间在整个循环工况总时间中所占的百分比。
(10)匀速时间比例rc,即工况匀速的时间在整个循环工况总时间中所占的百分比。
(11)怠速的次数fi。
本文采用图1所示的复合等分法,将循环工况识别周期划分为120 s的工况块,为增加测试数据量,将相邻工况块中点之间的部分继续划分为一个工况块。测试每个工况块的11个工况特征参数,于是每个工况块对应了一组工况特征参数。

图1 循环工况分段示意图Fig.1 Segmentation diagram of driving cycle type
2 构建LVQ神经网络工况识别模型
工况识别在混合动力汽车能量管理中的应用会涉及到不同道路类型[10-11]以及不同的循环行驶工况的识别[12],因此本文将对微观道路模式和综合行驶工况进行识别。
2.1微观道路路况模式
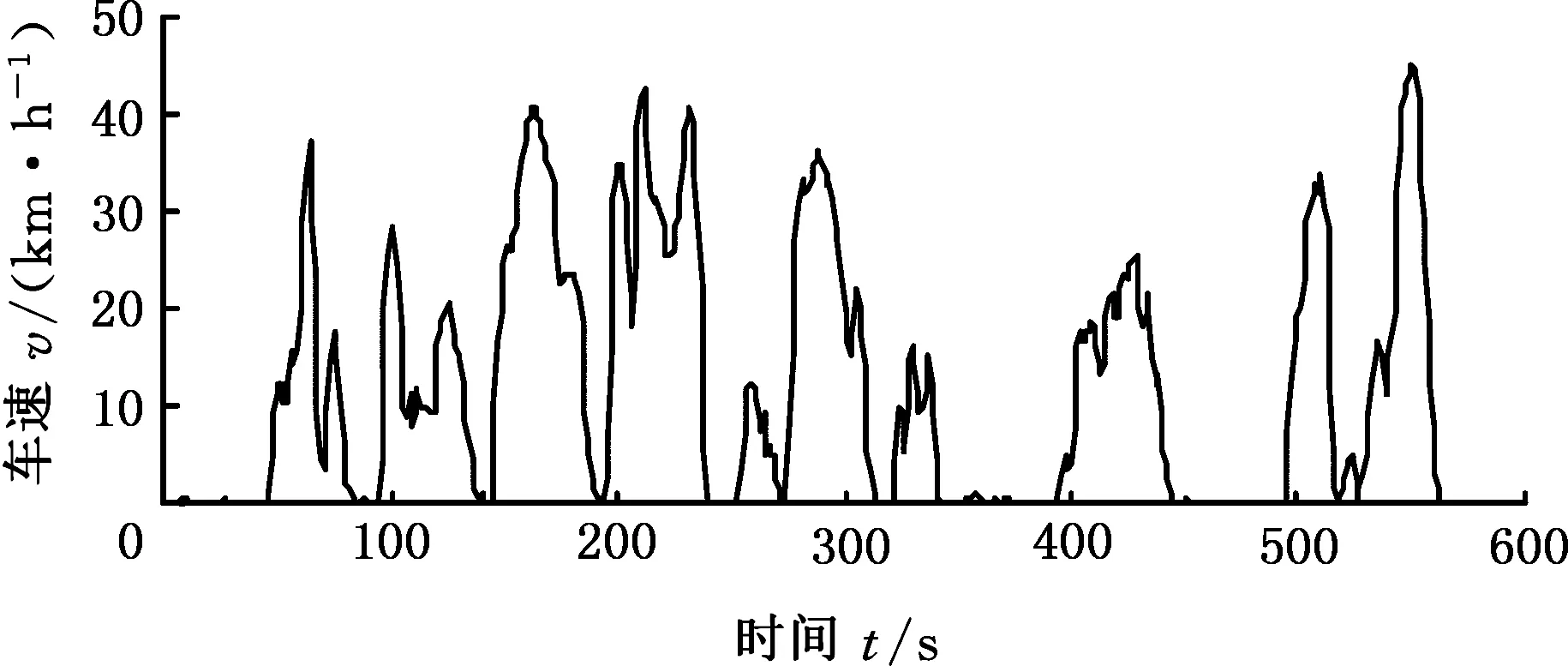
为研究不同道路交通状态,这里选取4种较为典型的道路模式,如代表拥堵时的交通(模式1)、居民区车速较低的分叉支路(模式2)、车速较快的城市主干道(模式3)以及郊区的快速道路(模式4),具体如图2所示。

图2 4种典型道路工况Fig.2 4 typical roadway type
2.2标准行驶工况模式
在实际道路行驶时,汽车所面临的行驶工况比较复杂,可能在各种复杂的行驶工况中连续运行,因此按照车辆行驶场景的不同,本文将行驶工况分为3类:城市拥堵工况(NYCC),城市郊区工况(UDDS),高速工况(HWFET),如图3所示。
(a)NYCC

(b)UDDS

(c)HWFET图3 标准行驶工况Fig.3 Standard driving type
3 LVQ神经网络的工况识别

LVQ神经网络的竞争层神经元个数必须大于线性输出层神经元个数,因为每个竞争层神经元只能和一个线性输出层的神经元连接,并且其权值为1,但是线性输出层的神经元可与多个竞争层神经元连接,且竞争层与输出层神经元之间的值只能为1或0。当某个数据样本通过输入层进入LVQ网络时,竞争层中与输入模式距离最近的神经元被激活,状态变为“1”,同时与之相连接的输出层神经元被激活,状态变为“1”。但是其他竞争层的神经元和输出层神经元状态变为“0”。

图4 LVQ神经网络结构Fig.4 The LVQ neural network structure
本文工况识别中的循环工况选用11个特征参数,因此输入层有11个节点,线性输出层为3个神经元,代表3种道路类型,1代表拥堵工况,2代表城市城郊工况,3代表高速工况。训练集和测试集是随机分配的,经过训练,训练误差变化如图5所示。由图可知,在训练达到54次时,识别的误差不再变化,趋近于0,说明训练的LVQ神经网络效果较好。

图5 LVQ神经网络训练误差变化过程Fig.5 Variation process of the training error of LVQ neural network
4 基于工况识别的控制策略示例
为充分体现工况模式识别在混合动力汽车能量管理控制策略中的优越性,以文献[10]中的某款混联式混合动力系统为例,其满载质量M=15 500 kg,迎风面积A=7.45 m2,风阻系数Cd=0.62,车轮半径r=0.5275 m,轴距L=4.3 m,主减速比i0=6.2。采用工况识别与多元非线性回归算法相结合的方法,制定相应的控制策略,具体如图6所示。当工况模型识别到具体的行驶工况时,选择相应的控制策略进行功率分配。以基于中国城市典型循环工况为例,图7所示为采用动态规划下获得的发动机最佳工作点。
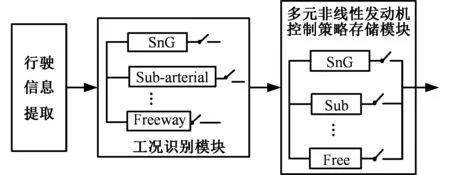
图6 基于工况识别的控制策略Fig.6 The control strategy based on roadway type recognition
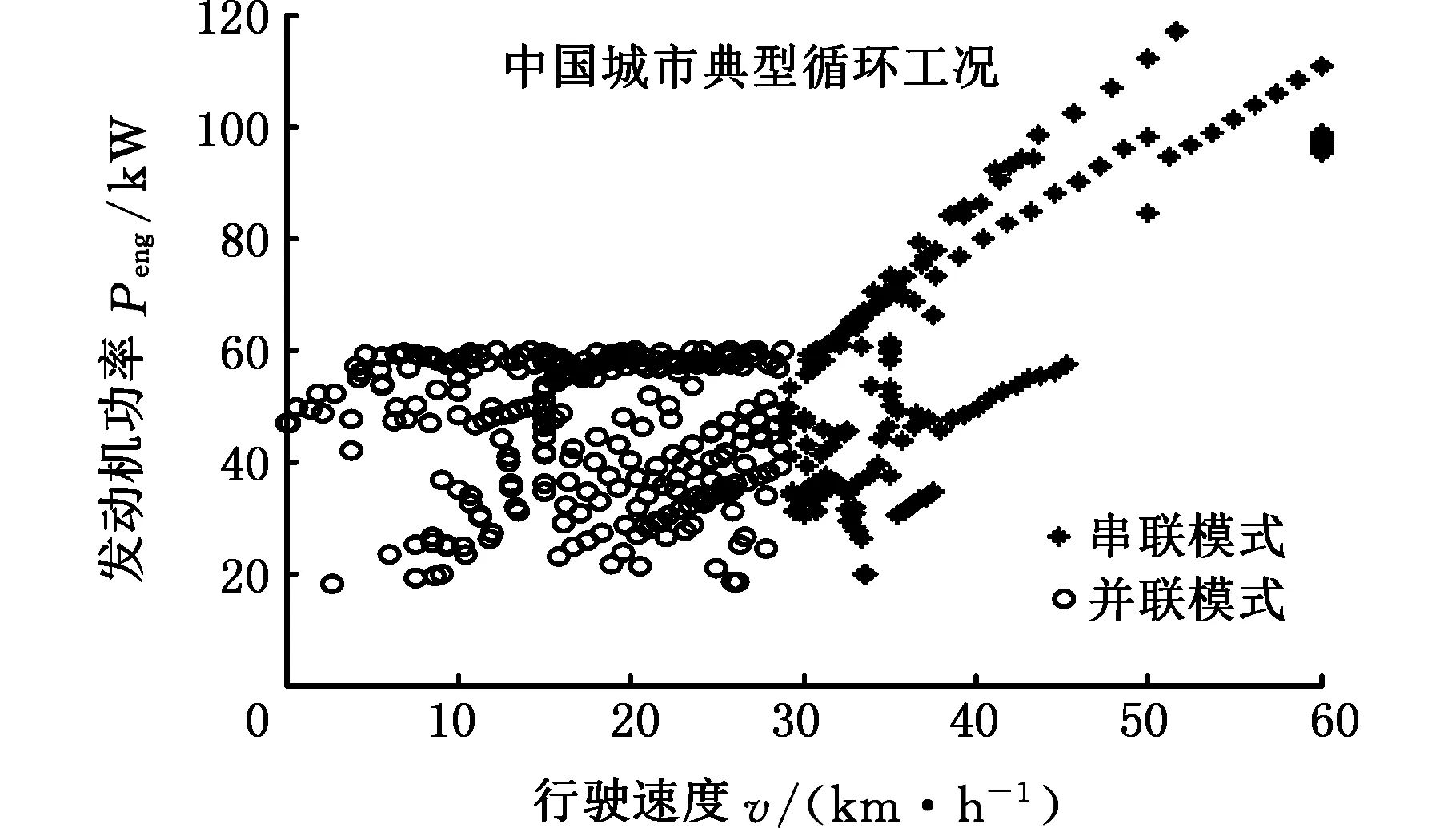
图7 基于动态规划下的发动机最佳工作点Fig.7 The optimal operating point of the engine based on dynamic programming
根据文献[12]的方法,对于上述基于动态规划下获得全局最优的发动机工作点,采用多元非线性回归算法进行发动机控制策略的设计,具体可归结为下式最小二乘法的问题:
(7)
其中,Yi为离散输出原始数值;yi为回归优化拟合数值;N为数据样本总数;x为输入数据参数,这里为行驶功率及行驶速度。
为了后续控制策略的应用,将发动机的多元非线性回归优化结果拟合成需求功率和车速的函数,这样就可直接嵌入控制器中进行查表插值,如图8所示。当通过计算得到需求功率及通过转速传感器获得车速时,便可直接获得最佳发动机控制策略,其具体表达式如下:

(8)
式中,Pe_reg为多元非线性回归优化获得的发动机控制输出功率;v、Preq分别为行驶车速和驱动需求功率。
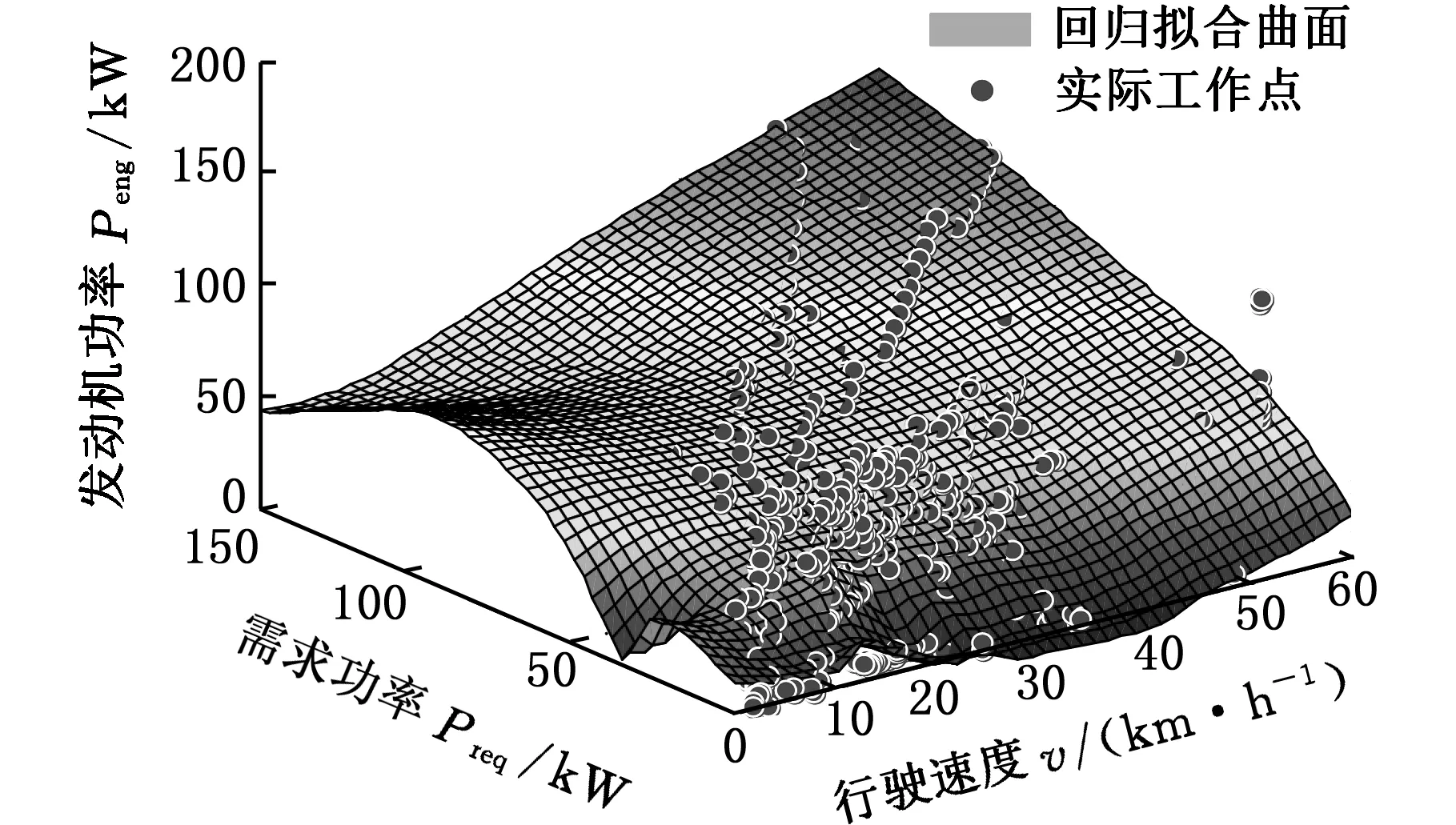
图8 多元非线性发动机优化控制规则MAPFig.8 The MAP of multivariate nonlinear engine optimization control rules
根据文献[10]中的混联式混合动力系统的结构特点,可简化归结为
(9)
式中,Pm为驱动电机功率和电机效率;Papu为动力辅助单元功率;Peng为发动机功率;Pbatt为电池功率。
无论是串联模式还是并联模式,都可由功率平衡来表示,也就是在任意时刻点,知道需求功率和发动机控制功率,便可相应计算出电池、驱动电机等控制功率。
5 工况识别仿真实验结果
采用MATLAB程序进行神经网络训练,并生成Simulink模型,为验证采用LVQ网络进行工况识别的准确性,基于Simulink平台建立道路和循环工况特征提取与识别的模型。随机选取一组训练数据,输入到训练好的LVQ神经网络中,其识别分类结果及误差如图9所示。
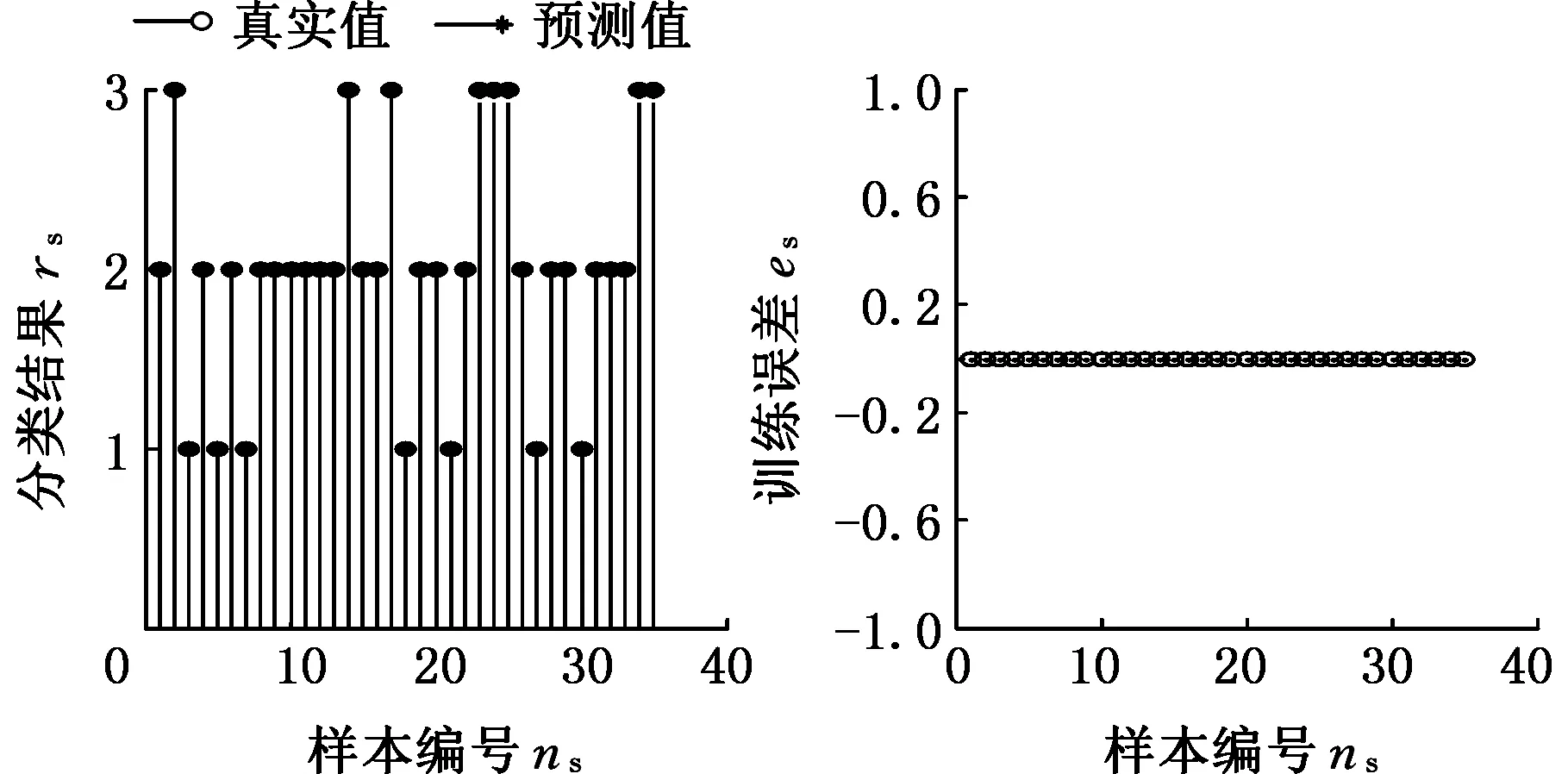
(a)LVQ网络训练后的效果 (b)LVQ网络训练后的误差图9 样本识别结果及误差Fig.9 Sample recognition results and errors
分别以识别周期T为50 s、80 s、100 s、120 s、150 s对中国城市典型循环工况进行识别,篇幅所限,仅列出50 s、100 s、150 s的识别结果,如图10所示。从图中可以发现,在识别周期不同的情况下,对测试标准循环工况来说,识别的周期越短,工况细分得越准确,越接近标准循环工况的实际情况;识别的周期较长,识别效果相对较差。
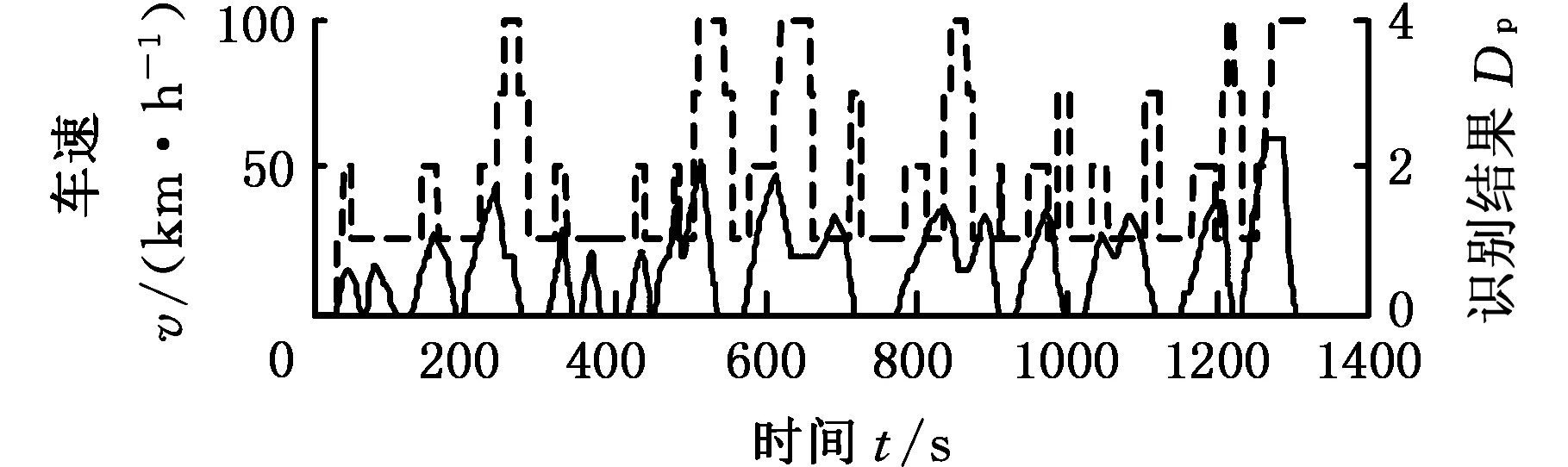
(a)T=50 s,M=10 s

(b)T=100 s,M=10 s
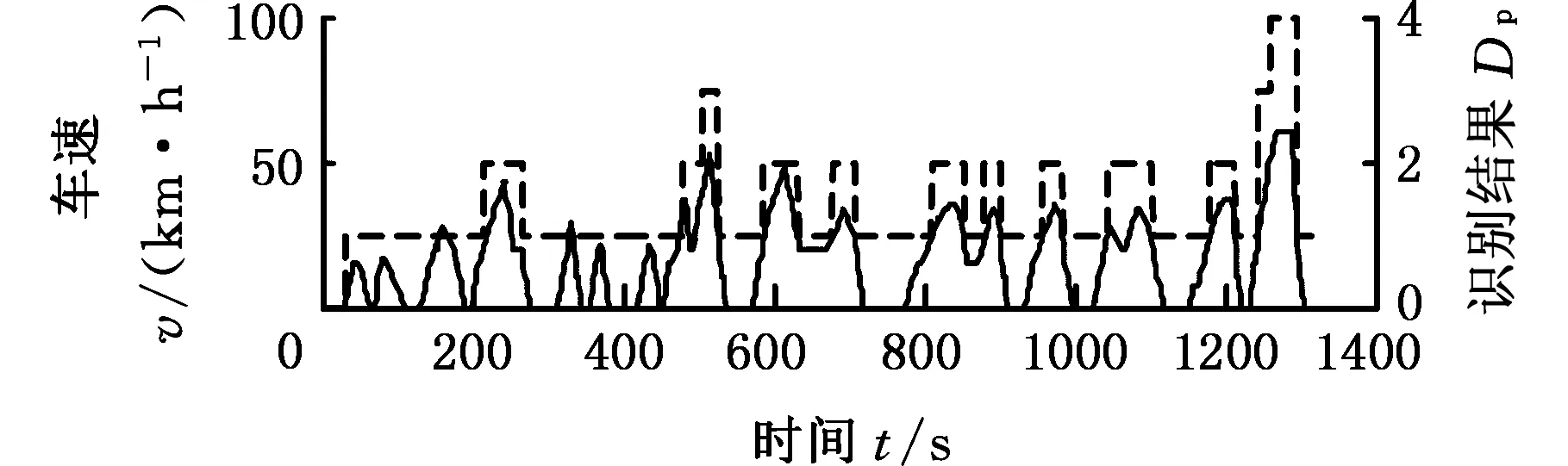
(c)T=150 s,M=10 s图10 3种采样时间下的识别结果Fig.10 Recognition results under 3 sampling times
构造UDDS+NYCC+UDDS+HWFET+NYCC+ HWFET的综合循环工况,代表车辆行驶时所经历的三种道路类型,1代表拥堵工况(NYCC),2代表城市城郊工况(UDDS),3代表高速工况(HWFET)。利用上述方法,综合循环工况5472 s的识别结果如图11所示。由图11可知,利用所训练的LVQ神经网络可以很好地对循环工况进行分类识别。
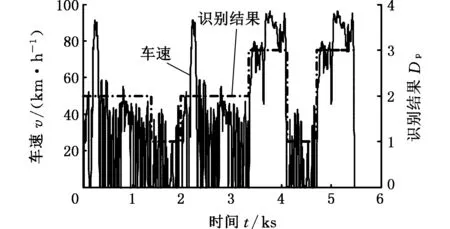
图11 综合循环工况识别结果Fig.11 Recognition result of comprehensivedriving cycle type
另外,将基于工况识别的控制策略与基于规则的控制策略进行比较,具体的仿真结果如图12、图13所示。其中,图12为电池荷电状态(SOC)的运行趋势,图13为燃油消耗结果,由结果可计算得知,基于工况识别比基于规则的控制策略燃油经济性提升近10%,因此,基于LVQ网络工况模式识别可有效提升控制策略的控制效果。

图12 SOC变化趋势的仿真结果Fig.12 Simulation results of SOC change trend

图13 燃油消耗的仿真结果Fig.13 Simulation results of fuel consumption
6 结论
(1)提取11个参数作为工况识别的特征参数,并组成相关数据矩阵,选取4种典型道路工况以及3类行驶工况为LVQ神经网络工况识别提供学习训练数据。
(2)基于Simulink建立了LVQ神经网络工况识别仿真模型,采用中国城市典型循环工况和构建UDDS+NYCC+UDDS行驶工况进行工况识别,并进行相应能量管理策略的验证。结果表明,所建立的LVQ神经网络工况识别算法可以准确识别所制定的工况模式类型。
[1] 林歆悠,孙冬野.基于工况识别的混联式混合动力客车控制策略研究[J]. 中国机械工程,2012, 23(7): 869-874.
LIN Xinyou, SUN Dongye. Development of Control Strategy for a Series-parallel Hybrid Electric City Bus Based on Roadway Type Recognition[J].China Mechanical Engineering, 2012, 23(7): 869-874.
[2] PARK J, CHEN Z, KILIARIS L, et al. Intelligent Vehicle Power Control Based on Machine Learning of Optimal Control Parameters and Prediction of Road Type and Traffic Congestion[J]. IEEE Transactions on Vehicular Technology, 2009,58(9):4741-4756.
[3] HUANG X, TAN Y, HE X. An Intelligent Multifeature Statistical Approach for the Discrimination of Driving Conditions of a Hybrid Electric Vehicle [J]. IEEE Transactions on Intelligent Transportation Systems, 2011,12(1): 453-465.
[4] ZHU W, BARTH M. Vehicle Trajectory-based Road Type and Congestion Recognition Using Wavelet Analysis [C]// IEEE Intelligent Transportation Systems Conference. Toronto, 2006: 876-884.
[5] HE H, SUN C, ZHANG X. A Method for Identification of Driving Patterns in Hybrid Electric Vehicles Based on a LVQ Neural Network[J]. Energies, 2012,5(9): 3363-3380.
[6] 田毅, 张欣, 张良,等. 神经网络工况识别的混合动力电动汽车模糊控制策略[J].控制理论与应用, 2011,28(3): 363-369.
TIAN Yi, ZHANG Xin, ZHANG Liang, et al. Fuzzy Control Strategy for Hybrid Electric Vehicle Based on Neural Network Identification of Driving Conditions[J]. Control Theory amp; Applications, 2011,28(3): 363-369.
[7] 詹森, 秦大同,曾育平. 基于遗传优化K均值聚类算法工况识别的混合动力汽车能量管理策略[J]. 中国公路学报,2016,29(4): 130-137.
ZHAN Sen,QIN Datong,ZENG Yuping. Energy Management Strategy of HEV Based on Driving Cycle Recognition Using Genetic Optimized K-means Clustering Algorithm[J]. China Journal of Highway and Transport, 2016,29(4): 130-137.
[8] 石琴, 郑与波, 姜平. 基于运动学片段的城市道路行驶工况的研究[J]. 汽车工程, 2011, 33(3):256-261.
SHI Qin, ZHENG Yubo, JIANG Ping. A Research on Driving Cycle of City Roads Based on Microtrips[J]. Automotive Engineering, 2011, 33(3): 256-261.
[9] JIE X,HAN X,YE H,et al.Driving Cycle Recognition for Hybrid Electric Vehicle[C]// Transportation Electrification Asia-Pacific (ITEC Asia-Pacific). IEEE Conference and Expo. Beijing,2014:1-6.
[10] 林歆悠,孙冬野. 基于ECMS混联式混合动力客车工况识别控制策略[J].湖南大学学报(自然科学版),2012,39(10):43-49.
LIN Xinyou, SUN Dongye. Driving Pattern Recognition Based on ECMS and Its Application to Control Strategy for a Series-parallel Hybrid Electric Bus[J].Journal of Hunan University(Naturnal Science),2012,39(10):43-49.
[11] 邓涛,卢任之,李亚南,等. 基于LVQ工况识别的混合动力汽车自适应能量管理控制策略[J]. 中国机械工程,2016,27(3):420-425.
DENG Tao, LU Renzhi, LI Yanan,et al. Adaptive Energy Control Strategy of HEV Based on Driving Cycle Recognition by LVQ Algorithm[J]. Journal of Mechanical Engineering ,2016,27(3):420-425.
[12] ZHANG S, XIONG R. Adaptive Energy Management of a Plug-in Hybrid Electric Vehicle Based on Driving Pattern Recognition and Dynamic Programming [J]. Applied Energy, 2015,155 :68-78.
(编辑王旻玥)
EnergyManagementStrategyBasedonTypeRecognitionandMultivariateNonlinearRegressionOptimization
SUN Lei1LIN Xinyou2LIN Guofa3
1.College of Mechatronic and Automation,Huaqiao University,Xiamen,Fujian,361021 2.College of Mechanical Engineering and Automation,Fuzhou University,Fuzhou,350002 3.SAIC Motor Corporation Limited(SAIC Motor) Technical Center,Shanghai,201804
The type recognition algorithm of driving conditions was studied based on LVQ neural network,to provide the basis for the intelligent management strategy of hybrid electric vehicles. First, 11 characteristic parameters were extracted from 4 typical road type conditions and the 3 kinds of standard cycle conditions to train the data. Then, the LVQ neural network type recognition algorithm of driving condition was developed. Based on this, a hybrid power system was as an example, which combined with multiple nonlinear regression analysis to develop the corresponding control strategy. Finally, LVQ neural network type recognition simulation model of driving condition was established based on the Simulink simulation platform, type recognition tests were carried on under the Chinese city typical cycle road conditions, standard condition recognition tests were carried on by constructing UDDS+NYCC+UDDS driving conditions. The results show that the established LVQ neural network may accurately identify the type of driving condition types and the control effectiveness of the energy management strategy is improved effectively.
learning vector quantization(LVQ) neural network; type recognition; driving cycle type; energy management
U461.8
10.3969/j.issn.1004-132X.2017.22.008
2017-03-01
国家自然科学基金资助项目(51505086)
孙蕾,女,1982年生。华侨大学机电与自动化学院讲师。E-mail:94072408@qq.com。主要研究方向为工业设计和新能源汽车。林歆悠,男,1981年生。福州大学机械工程与自动化学院讲师。林国发,男,1982年生。上汽集团技术中心工程师。
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
电子产品世界(2021年8期)2021-01-16
空间科学学报(2020年1期)2021-01-14
中国交通信息化(2019年12期)2019-08-13
消费导刊(2018年10期)2018-08-20
现代装饰(2018年5期)2018-05-26
制造技术与机床(2017年11期)2017-12-18
中国交通信息化(2017年8期)2017-06-06
山东工业技术(2016年15期)2016-12-01
