一种基于线性矩阵不等式的离散网络控制系统镇定方法
2017-11-30 12:38于晓明刘广达吴英男赵业平
辽东学院学报(自然科学版) 2017年4期
于晓明,刘广达,吴英男,赵业平,宁 靖
一种基于线性矩阵不等式的离散网络控制系统镇定方法
于晓明,刘广达,吴英男,赵业平,宁 靖
(辽东学院机械电子工程学院,辽宁 丹东,118003)
针对网络传输时延随机且有界的离散网络控制系统,选择适当的Lyapunov-Krasovskii泛函,获得系统渐进稳定的充分条件。进而,通过线性矩阵不等式(linear matrix inequalities,LMI)的等价变换和合理假设,推导出相应的状态反馈控制器设计方法。在结论的推导过程中,引入自由权矩阵,以获得更大的网络传输时延允许上界,降低保守性。数字仿真结果表明了该方法的正确性和有效性。
线性矩阵不等式;网络控制系统;自由权矩阵
网络控制系统(Networked control systems,NCSs)将通信网络引入传统闭环控制系统,在获得成本低、模块化、布线少和容易安装维护等优点的同时,通信网络同时也为闭环控制系统传感器信号和控制信号的传输带来了网络传输时延问题,造成传感器信息和控制信号无法在当前采样周期被使用。网络传输时延问题已经成为网络控制系统面临的主要问题,大量文献从采样理论、网络理论、信息论和时滞理论等不同角度给予了积极关注[1-3]。本文基于时滞理论,采用目前应用比较广泛的Lyapunov-krasovskii方法[4-8],寻找适当的Lyapunov泛函,引入LMI和自由权矩阵,进一步降低系统的保守性,获得更大的网络传输时延上界。
1 NCSs的数学描述
如图1所示的一般NCSs中,线性控制对象的离散化方程为
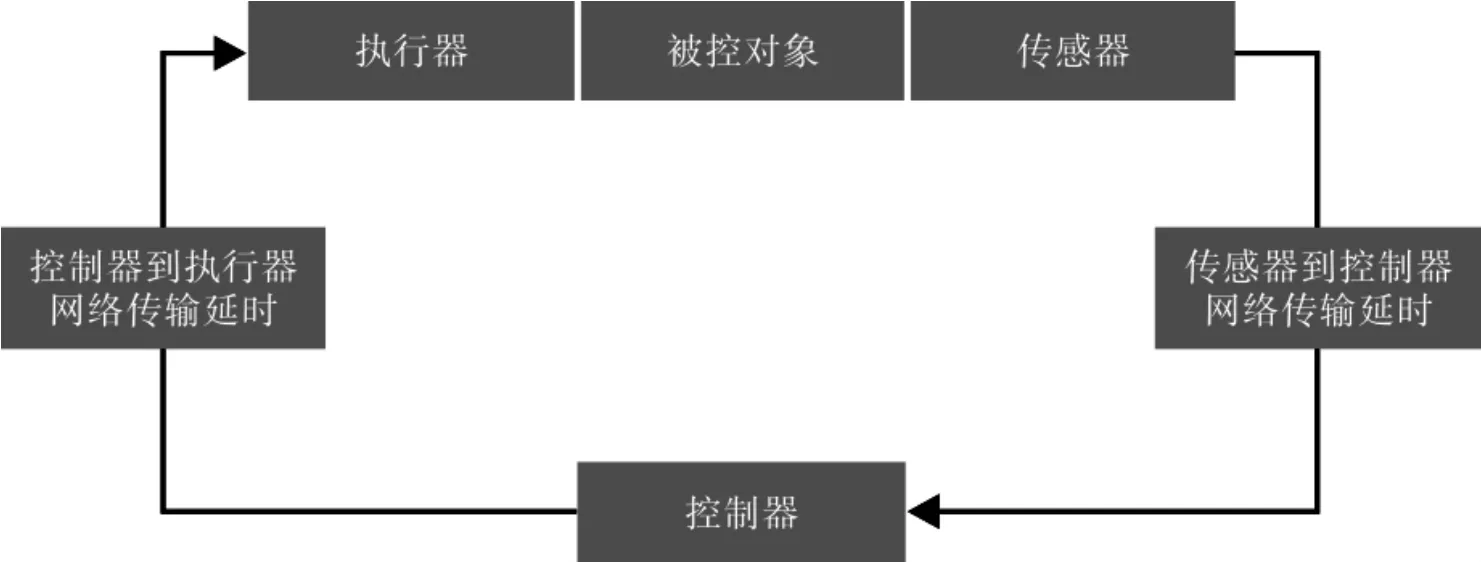
图1 NCSs框图

其中,x(k)∈Rn×1是系统的状态向量,u(k)∈Rm×1是系统的控制向量,y(k)∈Rr×1系统的输出向量,w(k)∈Rp×1和 v(k)∈Rq×1分别是状态变量测量时和输出测量时的外部扰动向量,A∈Rn×n是系统矩阵,B∈Rn×m是输入矩阵,C∈Rr×n是输出矩阵,E∈Rn×p和 F∈Rr×q分别是状态变量测量时和输出测量时的外部扰动控制矩阵。
由于引入了通信网络而产生有界且随机的网络传输时延τ,控制信号可表示为

其中,u表示控制信号,k表示采样时刻,K表示控制律,x表示状态变量,τ表示网络传输时延,整个时延由三部分组成,分别是传感器到控制器的网络传输时延τsc、控制器到执行器的网络传输时延τca和控制信号的计算时延τc。将三种时延合并考虑,即网络传输时延τ=τsc+τca+τc∈[0,τ],τ为网络传输时延的上界。
将控制信号(2)代入被控对象(1),同时,由于本文仅讨论NCSs的渐进稳定性,因此可以不考虑外部扰动对系统的影响,从而,可得到离散闭环状态反馈NCSs的一般数学模型

式(3)就是本文的研究对象,其建模过程暗含以下条件:①传感器模块是时间驱动的,即传感器模块每隔固定的时间间隔进行采样;②执行器模块和控制器模块是事件驱动的,即执行器模块每当接收到控制信号就立刻开始执行控制动作,控制器模块每当接收到传感器信号就立刻开始控制量的计算;③数据能够单包传输。
以下给出获得本文结论需要用到的引理[7]。
引理:对于任意适当维数的向量a、b和矩阵N、X、Y、Z,其中,X和Z是对称的,若
则

3 状态反馈网络控制系统稳定性分析
本节以定理的形式给出状态反馈离散网络控制系统渐进稳定的充分条件,并加以证明。
定理1:对于状态反馈离散网络控制系统(3),如果存在对称矩阵 P∈Rn×n,Q∈Rn×n,S∈Rn×n,M∈R2n×2n和 L∈Rn×n,以及非对称矩阵 Y∈R2n×n,满足下列矩阵不等式:

则对于任意网络传输时延τ∈[0,τ],离散网络控制系统(3)是渐进稳定的。其中,*表示矩阵中的对称部分,且

证明:试选择Lyapunov泛函如下

其中,V1(k)=xτ(k)Px(k)
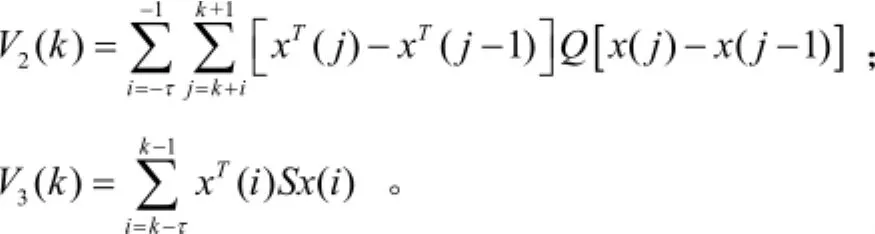
由给定条件 P>0,Q>0,S>0,显然有 V(k)>0。依次计算泛函(9) 中各个部分的差分,可得
引入恒等式



则,根据上节给出的引理,可以得到如下不等式

综合考虑等式(15) 和不等式(17),可得如下约束


再考虑对系统数学模型(3)进行变形,可以得到等式如下


将式 (13)、 (18) 和 (20) 相加,可得

由Lyapunov-Krasovskii稳定性理论可知,定理1得证。
4 状态反馈网络控制系统镇定策略
当控制矩阵K已知时,定理1中涉及的矩阵不等式都是LMI。此时,利用定理1,通过观察相应的LMI是否成立,可以容易地确定系统是否是渐进稳定的。但是,当一个已知的离散NCSs的控制对象需要求取一个控制器,使该系统是渐进稳定的,通过定理1便无法满足要求了。因为当控制矩阵K未知时,矩阵不等式(8) 不再是LMI,而成为双线性矩阵不等式(bilinear matrix inequalities,BMI)。
为了解决了离散NCSs控制器的求取问题,对定理1中LMI的矩阵关系进行强制假设,将BMI转化为LMI,以下提出定理2并加以证明。
定理2:对于状态反馈离散网络控制系统(3),如果存在对称矩阵∈Rn×n,∈Rn×n,∈Rn×n,∈R2n×2n和,∈Rn×n以及非对称矩阵∈R2n×n,满足下列矩阵不等式:


证明:当式(25) 成立时,对定理1中的矩阵不等式(4) 至(6) 左右两侧同时乘以矩阵L-1,可以得到矩阵不等式(22) 至(24),其中,

对定理1中的矩阵不等式(7) 和(8) 左右两侧同时乘以矩阵

可以得到矩阵不等式(26) 和(27),其中,

至此,定理2得证。
定理2选用了更加合理的Lyapunov-Krasovskii泛函并引入权矩阵消除无关项来处理控制系统的时滞情况,与Razumikhin方法相比,能够明显降低保守性。
5 数值仿真

针对被控对象(33),采用文献[9]的方法设计了状态反馈控制器[0.700 1 0],对应的最大网络传输时延为3个采样周期,冲激响应状态曲线仿真结果如图2所示;文献[8]设计了状态反馈控制器[-0.163 2 0.864 7],对应的最大网络传输时延为5个采样周期,冲激响应状态曲线仿真结果如图3所示。采用本文定理2设计了状态反馈控制器[-0.001 3 -0.012 1],对应的最大网络传输延时为7个采样周期,冲激响应状态曲线仿真结果如图4所示。三个仿真采用相同的网络传输时延和相同的采样周期(0.1 s)。从不同方法仿真结果的对比可见,应用本文所提供的定理2设计的控制器能够有效地提升NCSs的最大网络传输时延上界;同时,系统的动态性能也有明显的提升,能获得更快的响应时间。
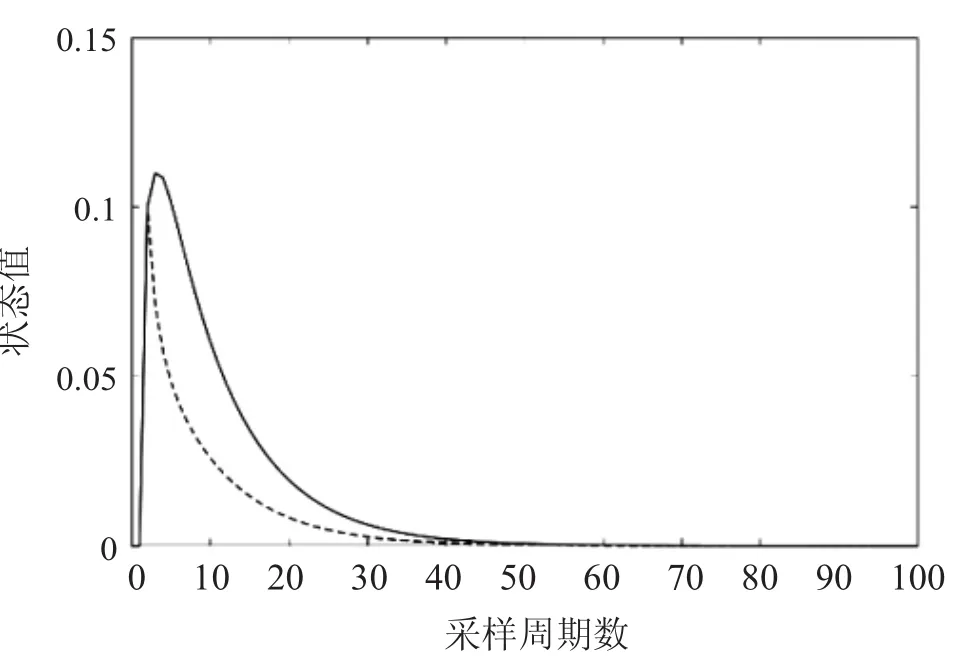
图2 文献[10]设计的控制器冲激响应状态曲线

图3 文献[8]计的控制器冲激响应状态曲线
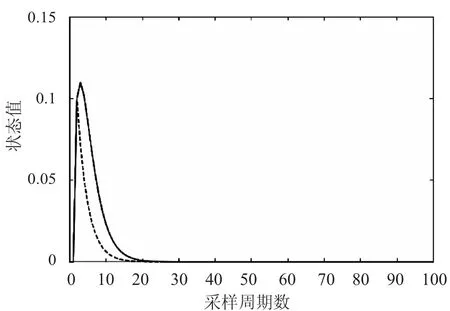
图4 应用本文定理2设计的控制器冲激响应状态曲线
6 小结
本文考虑了存在随机且有界网络传输时延的离散NCSs,以定理的形式给出了其渐进稳定的充分条件和状态反馈控制器的设计方法。在定理的推导过程中,考虑了相关文献的推导,并在泛函的选取、权矩阵的选择等方面进行了改进,以提升允许的最大网络传输时延上界,降低保守性。最后,数字仿真证明了本文所提供方法的可行性和优越性。
[1]游科友,谢立华.网络控制下他的最新研究综述 [J].自动化学报,2013,39(2):101-118.
[2]芮万智,江汉红,侯重远.网络控制系统研究综述与展望 [J].信息与控制,2012,41(1):83-88.
[3]孙坚栋.网络控制系统的稳定性分析和镇定策略 [D].杭州:浙江大学,2012.
[4] YUE D,HAN Q L,PENG C.State feedback controller design of networked control systems [J].IEEE transactions on circuits and systems—II: Express briefs,2004, 51(11):640-644.
[5] RASOOL F,HUANG D,NGUANG S K.Robust output feedback control of discrete-time networked systems with limited information [J].Systemsamp;Control Letters,2011,60:845-853.
[6]张冬梅,俞立,周明华.具有快变时延和丢包的网络控制系统镇定 [J].控制理论与应用,2008,25(3):480-484.
[7]郭亚峰,李少远.网络控制系统的 状态反馈控制器设计 [J].控制理论与应用,2008,25(3):414-420.
[8]于晓明.网络控制系统控制策略研究 [D].杭州:浙江大学,2012.
[9] YUM,WANGL,CHUTG.An LMIapproach tonetworked control systems with data packet dropout and transmission delays[ C].Proceedings of the decision and control conference,IEEE,2004,3545-3550.
Stabilization of descrete networked control system:A linear matrix inequality based method
YU Xiao-ming,LIU Guang-da,WU Ying-nan,ZHAO Ye-ping,NING Jing
(College of mechanical and Electronic Engineering,Eastern Liaoning University,Dandong 118003,China)
For a discretenetworked control system with random and bounded network transmission delay,an appropriate Lyapunov-Krasovskii function was chosen and sufficient conditions for the asymptotic stability of the system were obtained.Furthermore,through the equivalent transformation and reasonable assumptions of linear matrix inequalities, the corresponding state feedback controller was derived.In the derivation process, free weight matrices were introduced in order to obtain wider allowable bound of network transmission delay and reducetheconservatism.The numerical simulation resultsshow that theproposed method iscorrect and effective.
linear matrix inequality;networked control system;freeweight matrix
TP273
A
1673-4939(2017)04-0271-05
10.14168/j.issn.1673-4939.2017.04.10
2017-07-14
于晓明(1979-),男,辽宁岫岩人,博士研究生,讲师,研究方向:网络控制系统。
(责任编辑:龙海波)
猜你喜欢
中等数学(2022年6期)2022-08-29
煤气与热力(2021年12期)2022-01-19
通信电源技术(2020年8期)2020-07-21
校园英语·上旬(2019年6期)2019-10-09
电子制作(2019年23期)2019-02-23
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
新疆大学学报(自然科学版)(中英文)(2014年3期)2014-11-02
筑路机械与施工机械化(2014年4期)2014-03-01