
合肥骆岗机场净空障碍物测量方法研究
2017-11-23 07:41王瑞云仵振东张文鹏
宿州学院学报 2017年10期
王瑞云,仵振东,张文鹏
1.宿州学院环境与测绘工程学院,宿州,234000; 2.池州学院资源与环境学院,池州,247000;3.合肥市测绘设计研究院,合肥,230061
合肥骆岗机场净空障碍物测量方法研究
王瑞云1,仵振东2,张文鹏3
1.宿州学院环境与测绘工程学院,宿州,234000; 2.池州学院资源与环境学院,池州,247000;3.合肥市测绘设计研究院,合肥,230061
随着我国经济的快速发展,多层次、便捷高效的航空运输、交通等活动会变得不可或缺。机场净空是保障飞行器安全起飞、着陆和复飞等的重要前提,是机场设计、施工和运营监督阶段的重要影响因素,甚至会影响到机场的飞行等级。在讨论机场净空障碍测量相关内容的基础上,根据合肥骆岗机场的实际情况,提出平面测量以RTK直接测量为主,高程测量以全站仪单向三角测量为主的外业数据采集方法,同时设计程序实现数据的整体转换。外业方法简化了控制测量,增强了碎步测量的可操作性,内业方法的程式化处理缩短了作业周期,同时移植性较强,提高了作业效率。
合肥骆岗机场;机场净空障碍物测量;全站仪和RTK;VB程序设计
建国以来,尤其是改革开放以来,我国在中国特色社会主义建设中取得了举世瞩目的成就。国家的发展、经济持续高速的增长都离不开便捷高效的交通,如果说煤等资源是经济的“血液”的话,那么一个国家的交通就应该是其“经络”;同时,中国庞大的人口基数带来的出行需求也决定了必须要有高质量的交通系统来满足。航空作为一种高效便捷有效规避拥堵的交通选择,在我国未来交通规划蓝图中的重要环节得到了长足发展。据《中国民用航空发展第十三个五年规划》[1],“十二五”期间,2015年总运输周转量852亿吨公里,旅客运输量4.4亿,货邮运输量629万吨,民用运输机场207个。按照规划,“十三五”期间总周转量将达到1 420亿吨公里,旅客运输量将达到7.2亿,货邮运输量850万吨,民用机场将超过260个;同时注重发展的结构层次,指出通用航空要蓬勃发展,通用机场将达500个以上。以此为背景,贯穿于机场设计选址、施工以及监督运营阶段的净空调查与测量必将受到越来越多的重视,因为它是保障飞行器安全活动于机场的前提。
1 机场净空测量
为了保证飞机在机场的安全活动,必须在机场及其周边区域提供一个特定的无障碍空间。该空间实际上主要有各个限制面来保证,是一个立体的概念,主要包括过渡面、进近面、爬升面等,如图1-3所示。

图1 常见机场限制面示意图
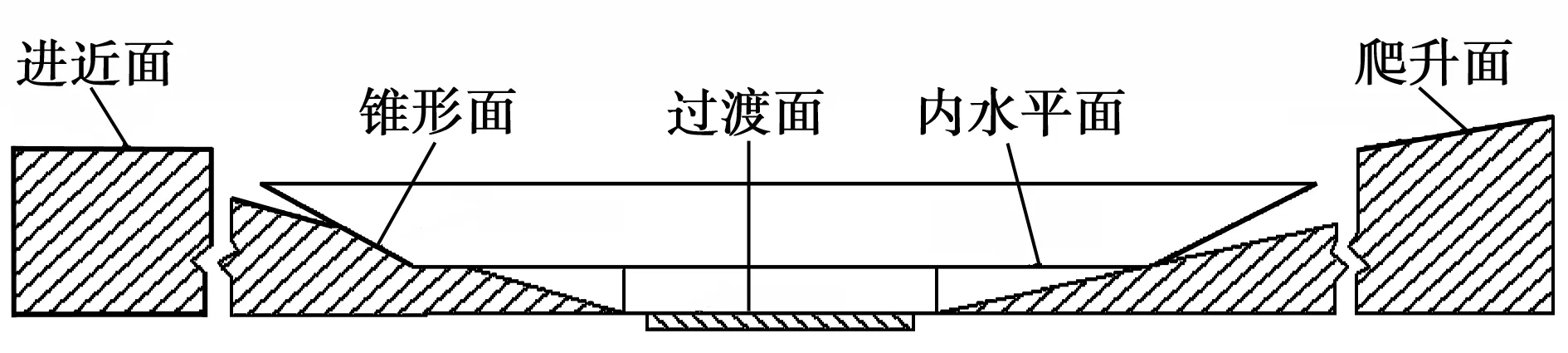
图2 剖面示意图H~H
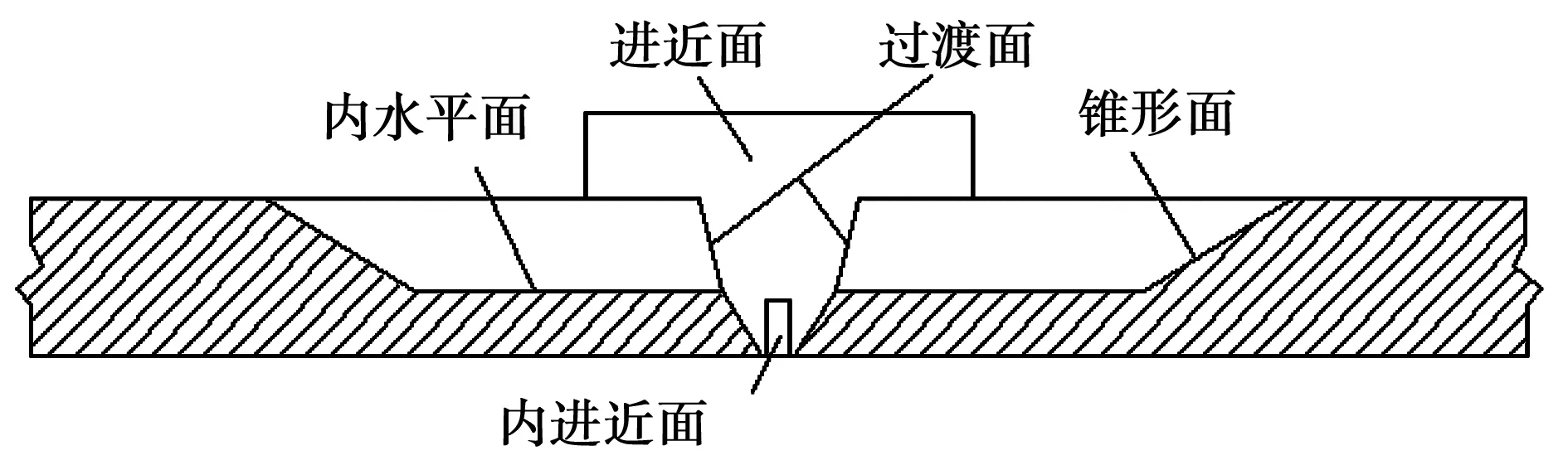
图3 剖面示意图Z~Z
净空在规划设计、建设以及运营阶段均需要顾及。据统计,我国大部分机场都存在净空问题,有的甚至被迫关闭。依相关规范要求[2],获取净空区内障碍物的坐标信息,尤其是高程信息极为重要[3-4]。障碍物是指在机场起降范围内的较高建筑和构筑物,比如超出净空限制高度的建筑物、烟囱、信号塔、高压线、高架桥等。净空测量的目的就是获得这些障碍物的三维坐标信息,然后进行各项计算和评估,服务设计和决策,要满足机场管理生产部门的要求,一般为小比例尺作业。障碍物既有山体、高楼等高大物体,又有避雷针、通讯塔、输电塔架等较小物体,高耸物体较多,很难登顶;机场净空范围一般较大,各目标物分布零散,而作业时间紧任务重,这些特点都为测量工作带来了困难[4-5]。过往的研究者作了各种尝试,王建国等提出由于机场净空评定是将障碍物的高程与机场净空限制面的允许高程进行比较,因而测量时无需建立控制点,可以任意位置设站,平面位置可以由RTK直接测得,这种方法是全站仪结合GPS-RTK技术完成作业的典型[3];安志国等参考前人研究[11-12],提出目标物平面位置可以由GPS-RTK直接测得,高程用RTK测得的地面高程与全站仪三角高程测得的高度相加得来[4];张高兴等[6]采用GPS静态定位建设E级点,全站仪水准测量作为高程控制,连测E级网中的3个点,作高程二次曲线拟合,以上为首级控制,最后用全站仪加密一、二级导线点和支点,作为具体控制,目标物的平面和高程均由交会法得到。其他研究者也根据研究对象的具体情况给出了有针对性的解决方案。
2 合肥骆岗机场净空测量
2.1 机场净空情况
合肥骆岗机场位于合肥市包河区美菱大道1号,距合肥市中心约9.5千米,真方位178°,坐标北纬31°46′48″,东经117°17′54″,占地约135公顷,于1977年11月建成使用。2013年5月,根据合肥市大建设发展统一规划,新桥机场建成启用,骆岗机场于2013年5月29日关闭停用。在合肥“十三五规划纲要”和2016年政府工作报告中,都把发展通航产业列入了工作计划,因此本着最大限度利用现有跑道和设施,依据通航产业战略规划精神,2016年底经批准原骆岗机场改建为合肥骆岗通用机场。
调阅原机场设计和各个阶段测量资料,确认机场净空区范围,结合区域内合肥测绘院存档大比例尺地形图、卫片和航片等资料,并进行净空调查。发现在骆岗机场关闭的三年中,由于高度规划放开,结合合肥大建设的背景,周边建设迅速加快,净空破坏严重:跑道周边净空区内有大量楼盘、商城写字楼、高压电塔、通讯信号塔等;机场净空保护区外许多建筑海拔高度超出限制;另有在建和规划未建的建筑物超出高度限制。
2.2 净空障碍物测量
障碍物碎部点的采集可以采用RTK和全站仪结合的方法,前者易于到达的目标,效率高;后者可以应对目标物不易到达或者RTK无法获得固定解的情况。需要注意的是,如果要求数据是基于WGS84椭球的或者前期资料收集和限制面计算完成较好,针对目标物高程可以用地面标高(推算得来)加建筑物高度,或者RTK测得地面标高再加建筑物高度。建筑物高度可以使用RTK测量,或者由全站仪三角高程测得(包括单向三角、悬高、交会等方法)。如果要求提供正常高数据,则需要考虑高程异常的影响,可以使用水准面精化数据或者加入必要的高程控制,比如可以采用水准测量或者全站仪三角高程等方法,从区域内水准点引测。
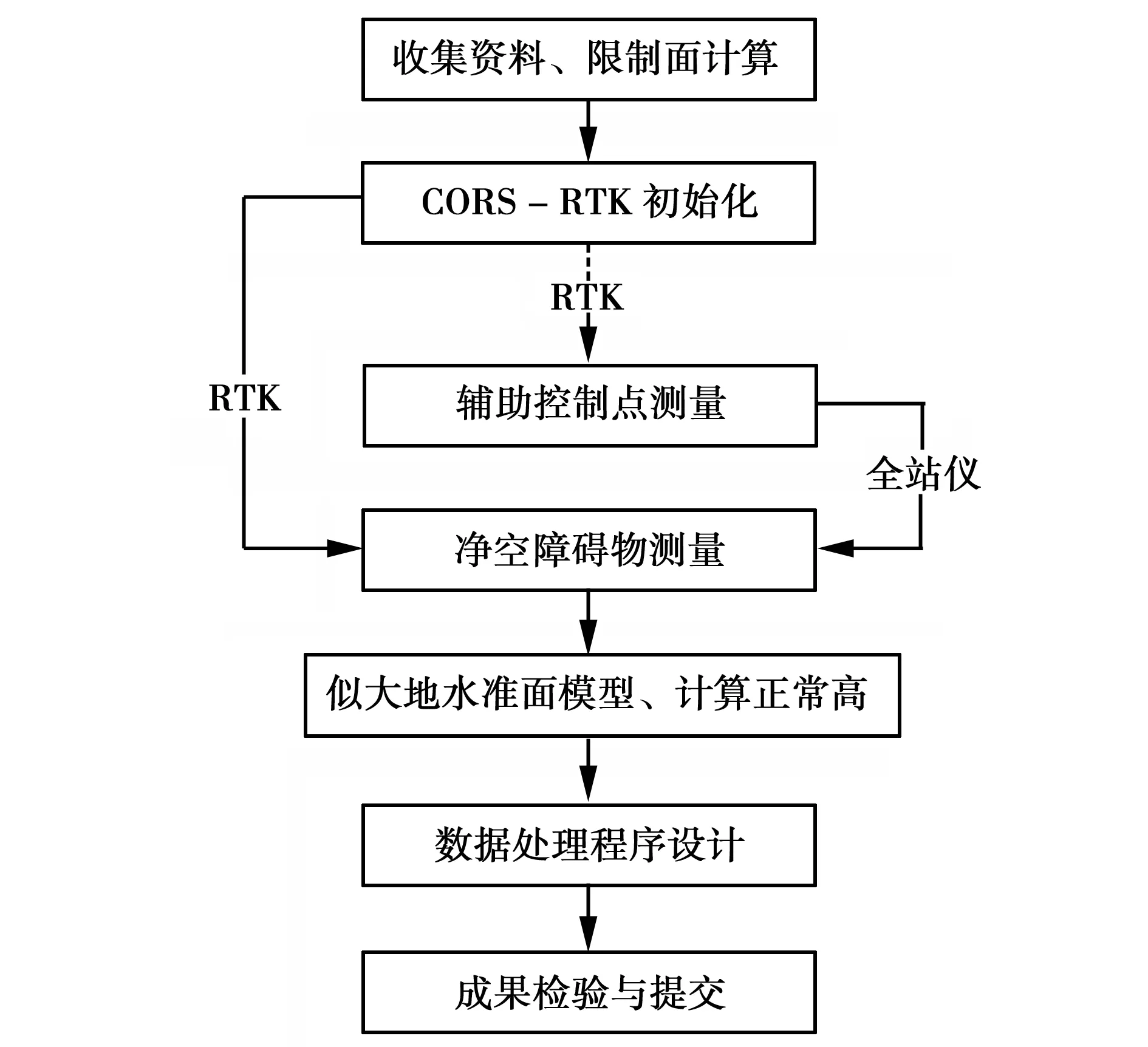
图4 作业流程
本次作业方案流程如图4所示。由合肥测绘院主导完成了城市三维空间定位系统,核心内容包括两部分:合肥市卫星定位综合服务系统(HFCORS)和合肥市大地水准面精化(HFGEOID)[13]。前者运行稳定,精度可靠,后者模型可靠,精度可以达到厘米级。两者结合可以很好地服务本次机场净空障碍物测量,目标物的平面位置,方便到达处可以采用CORS-RTK直接测得,特征点取与机场跑道轴线正交的最近点;不易到达的地方可以采用全站仪极坐标法或者交会法测得。目标物高程,对于最高点反射面比较大的,比如房屋、水塔等,可以直接用单向三角直接测得,可以任意设站后视一个辅助控制点(RTK测得),或者在一个辅助控制点上设站;对于目标反射面较小或者周围环境复杂不易接近的地方,比如避雷针、信号塔等,无棱镜测距精度和测程会下降,这些目标多是安放在基座上,如果其下方可以到达,则可以采用全站仪悬高测量,如果下方难以到达,可以在其附近适当位置采集两辅助控制点,然后进行三角交会测量。
如图5所示,a为单向三角测量,测量量为斜距和竖角;b为悬高测量,测量量为到棱镜斜距和竖角以及棱镜到最高点竖角;c为前方交会,测量量为距离、两个竖角和两个水平角。三种方法都需要辅助控制点,可以使用RTK在适当位置采集,都以三角高程为基础,短距离内可忽略球气差的影响。前两种方法施测时可以变动仪器高施测两次取均值,第二种方法应注意棱镜要立在目标的正下方,第三种方法可看作是第二种方法的变种,其实质为通过交会确定目标的垂直投影位置,可克服目标下方不易到达或者难以立镜的困难,比如通讯铁塔下方为水塘,施测时要注意交会角(γ角)的大小,最好控制在30°~120°,精度高,另外此种方法也可获得平面位置。三角高程测量在施测中可以根据实际情况有很多变种,这里不再展开讨论。最终得到成果截图如图6所示(经过了缩放)的净空区内障碍物分布图,图面注记目标物处实际海拔和限制面海拔。

图5 净空障碍物测量方法
图6 平面测量成果图(部分)
3 数据处理程序设计
最终测量数据格式为南方CASS格式,为批量生成飞行设计院要求的格式,笔者采用VB语言完成了数据批量转换的程序设计,输入机场基准点坐标,即可得到障碍物相对于机场基准点的真方位角,同时按照投影反算得到障碍物的经纬度坐标。基准输入GUI和最终成果截图如图7和图8。
图7 数据输入GUI
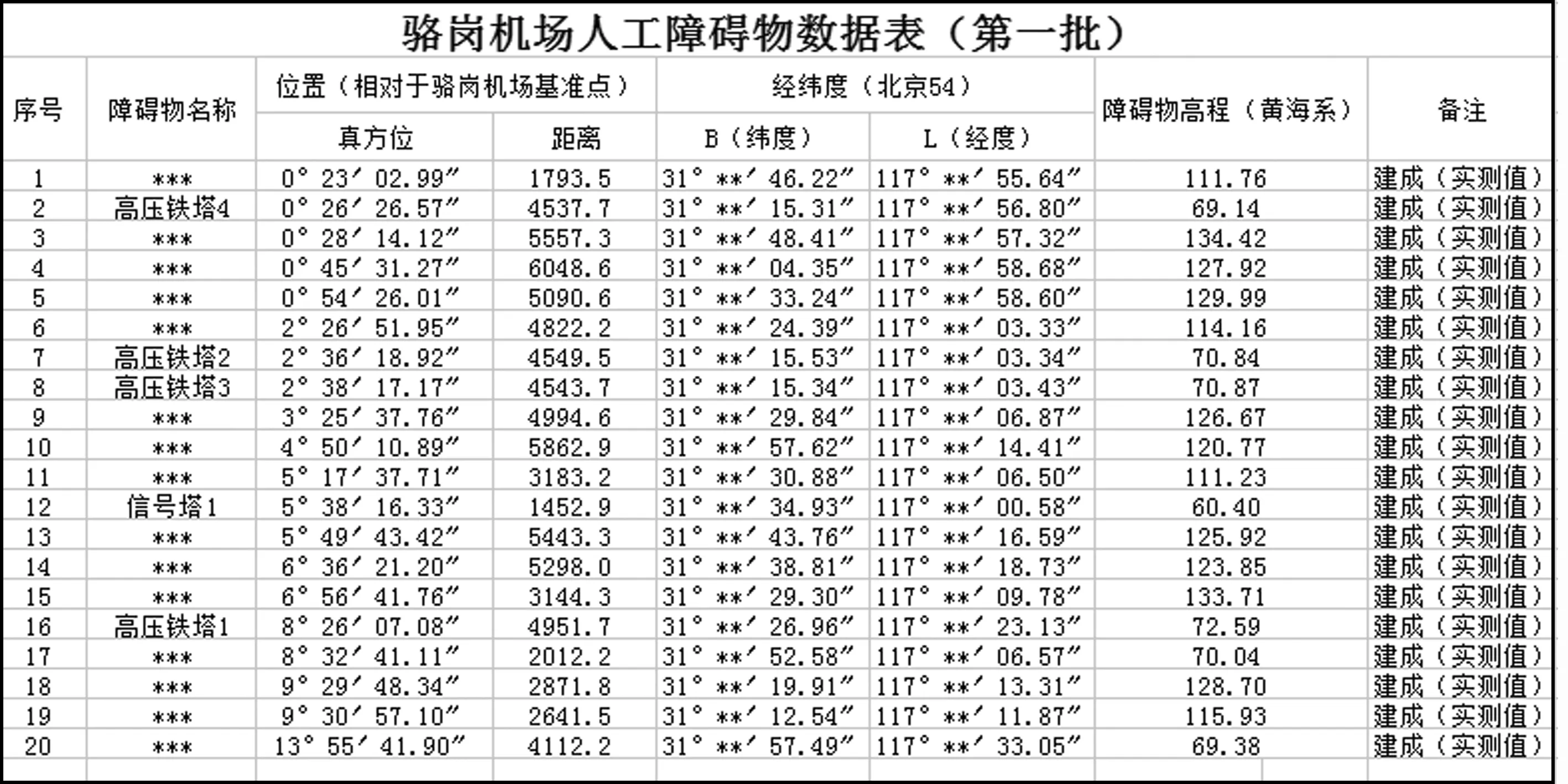
图8 成果数据表
4 结 语
采用CORS-RTK与全站仪结合的方法很好地完成了合肥骆岗机场的净空障碍物测量作业,自行设计了数据转换程序。总结了现行测量方法的特点,给出了自己的解决方案,限于篇幅没有对各方法的精度作定量比较,下一步拟对各方法精度作进一步研究,同时拟对基于3S技术的机场净空障碍物三维可视化呈现展开研究。
[1]中国民用航空局.中国民用航空发展第十三个五年规划[EB/OL].[2017-05-21].http://www.caac.gov.cn/XGK/XXGK/
[2]MH5001—2013,民用机场飞行区技术标准[S].中国民用航空总局,2013
[3]王建国,王长国,黄曙清,等.机场净空区障碍物单向三角测量的方法及精度分析[J].测绘科学,2012,37(2):179-181
[4]安治国,黄红曲,陈金龙,等.机场净空区障碍物测量方法与精度分析[J].测绘地理信息,2016,41(1):54-56
[5]谭长瑞,薛玖红.淮安机场净空区控高调查测量研究[J].科技资讯,2013(2):42
[6]张高兴,陈建水.冠豸山机场净空障碍物测量方法研究[J].龙岩学院学报,2006(6):50-52
[7]韩海星,朴东均,郑龙国.“延吉机场障碍物测量”方法探讨[J].城市勘测,2005(5):40-42
[8]戴晓爱.遥感图像三维可视化及在腾冲机场建设中的应用研究[D].成都:成都理工大学地球科学学院,2005:7-11
[9]韩立.3S技术在机场选址与净空分析中的应用研究[D].成都:成都理工大学地球科学学院,2014:20-31
[10]李静.机场净空障碍物评估三维可视化技术研究[D].广汉:中国民用航空飞行学院交通空中管理学院,2011:60-74
[11]周科,种小雷,刘晓军.前方交会法在净空区障碍物测量中的应用及精度分析[J].有色金 属,2010,62(4):71-73
[12]付子傲,包欢,彭小刚,等.应用GPS/GSM与全站仪联合进行机场净空区障碍物测量 [J].测绘通报,2006(3):38-39
[13]刘道明.合肥市厘米级大地水准面的确定[J].城市勘测,2011(3):76-77
(责任编辑:汪材印)
2017-07-26
池州学院自然科学研究项目“基于Autolisp语言的建筑物三维建模”(2016ZR015);池州学院教学研究项目“应用型本科院校测绘工程CAD课程体系改革研究”(2016XJYXM67)。
王瑞云(1986-),山东潍坊人,硕士,助教,研究方向:工程测量。
10.3969/j.issn.1673-2006.2017.10.031
P258
A
1673-2006(2017)10-0121-04
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
宝藏(2021年3期)2021-04-20
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
工程与建设(2019年3期)2019-10-10
电测与仪表(2016年9期)2016-04-12
河南科技(2014年22期)2014-02-27
河南科技(2014年5期)2014-02-27
