基于新型滑模观测器的永磁同步电机无位置传感器控制
2017-11-23 04:18辽宁轨道交通职业学院沈阳市110004
石河子科技 2017年3期
(辽宁轨道交通职业学院,沈阳市,110004)
永磁同步电机因为其具有效率高、功率密度大和控制相对简单等特点,在交流调速系统中得到了广泛的应用。在永磁同步电机速度控制系统中,转子的位置和速度通常由传感器检测得到,然而传感器不仅带来了成本的增加而且因为其对周围环境的敏感降低了系统稳性[1]。因此,永磁电机的无传感器控制仍然是热门的研究方向[2-5]。
目前,采用无传感器的方法来估算PMSM转子的位置和速度的研究已有很多。有研究采用磁链观测的方法,该方法在电机运行时,定子电阻的变化会造成磁链估测不准确,并且低速性能不好。文献将卡尔曼滤波引入磁链观测,克服了电机参数变化和干扰带来的影响,但算法复杂,计算量大。也有研究采用基于高频信号注入的估算方法,虽然高频信号的注入可以有效改善电机低速运行特性,甚至是止转特性,但是同时也增加了调速系统的噪声,当电机转速加大时,系统性能会急剧的恶化。还有采用滑模观测器法(SMO),通过电流模型实现对转子位置和速度的估计,滑模观测器具有良好的动态性能和估计精度,并且对参数变化和干扰具有鲁棒性,然而传统采用符号函数的SMO需要滤波器和角度补偿来减少抖振,降低了系统响应时间。
提出一种用变边界层S函数做为开关函数的滑模观测器,S函数的边界层随PMSM转速进行调整,可有效消除抖振,并且不需要低通滤波器的位置补偿,提高动态品质。PMSM转子的位置和速度通过反电动势(EMF)估算出,为了克服电机参数变化和提高稳态特性,文中给出了定子电阻的估算方法。最后通过仿真实验验证了该方法的正确性和有效性。
1PMSM数学模型
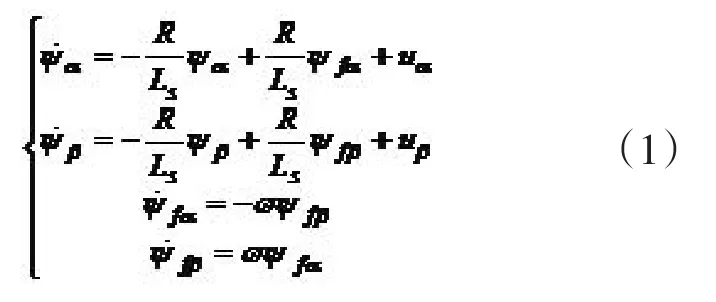
永磁同步电机在静止两相坐标系下的磁链状态方程为:
输出方程为:
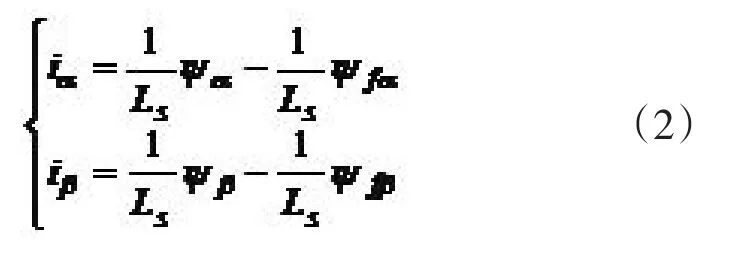
其中:ψα、ψβ分别为αβ、轴定子磁链;ψfα、ψfβ分别为α、β轴转子永磁磁链;υα、υβ分别为α、β轴定子电压;iα、iβ分别为α、β轴定子电流;R为定子电阻;ω为转子的电角速度;Ls为定子电感。
根据图1转子永磁磁链可以表示为:
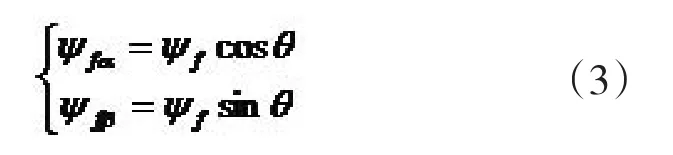
其中转子位置θ=ωt。

图1 坐标系下转子永磁磁链
由式(1)和式(2)可推导出关于定子磁链和定子电流的状态方程:
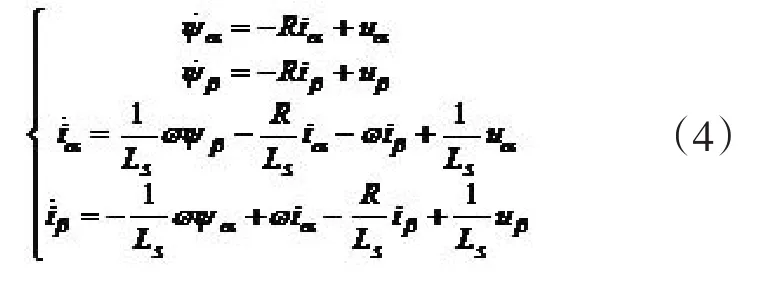
并且定子反电动势为:

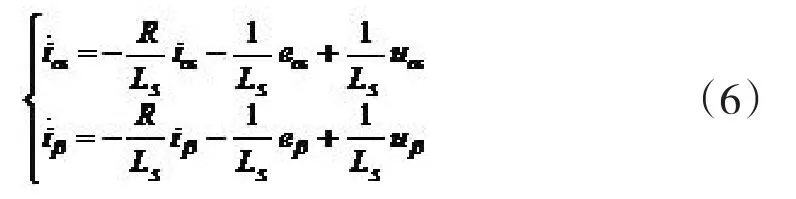
所以根据式(2)、(4)、(5)得到PMSM在α-β静止两相坐标系下关于电流状态方程为
2PMSM的滑模观测器设计
2.1 滑模观测器模型
根据式(6)建立滑模观测器模型为:
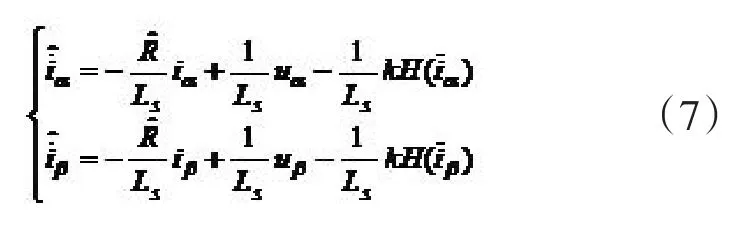

其中α为调节S函数斜度的正常数。
2.2 稳定性分析
根据定子电流误差,定义滑模面为:



根据PMSM的电流模型(6)和观测模型(7)得
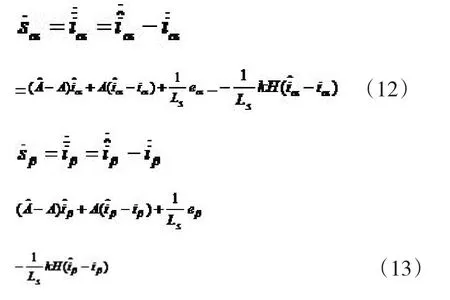
其中:
将式(12)、(13)带入式(11)得滑模条件为:
根据(15)式得到定子电阻观测值为

根据(16)式可推出
式(18)中S函数的输出范围在之间,所以为了满足(18)式的条件

按(19)式选择的k可以保证上述滑模观测器收敛到实际值,但值取的越大抖振越严重,所以在k的取值上应该综合考虑稳定性和抖振问题。此外,S函数边界层宽度随转速的变化也可有效抑制抖振,S函数变化如图2所示。
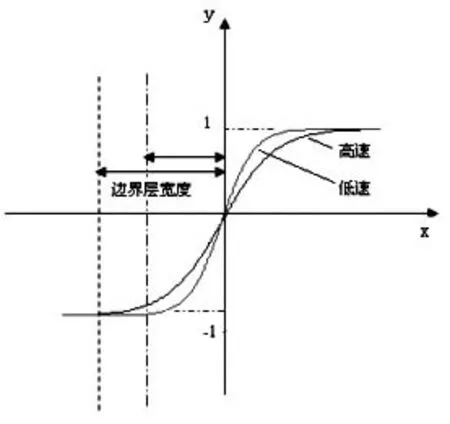
图2 S函数边界层宽度变化图
2.3 转子的位置与速度观测计算
选择合适的增益k,当系统进入滑模面后

根据上式反电动势可近似表示为

所以转子的位置和速度由反电动势可估算为
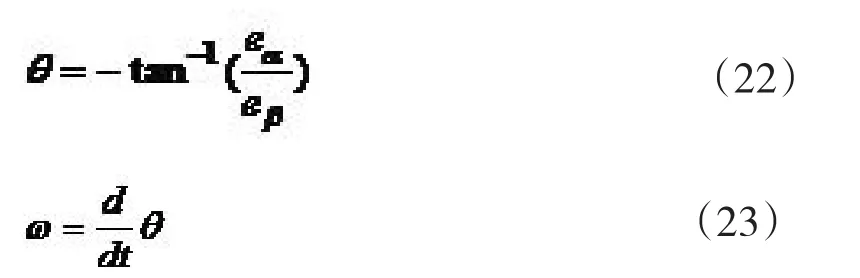
滑模观测器位置和速度估算原理图如图3所示。
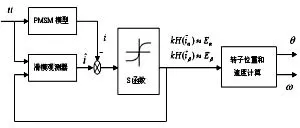
图3 滑模观测器位置和速度估算框图
3 仿真研究试验
图4为本文所提永磁电机无速度传感器控制结构框图,采用Matlab/simulink进行仿真实验,实验所用PMSM参数见表1。
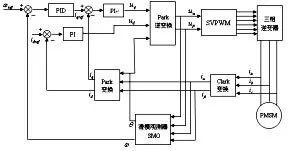
图4 PMSM无速度传感器控制结构图
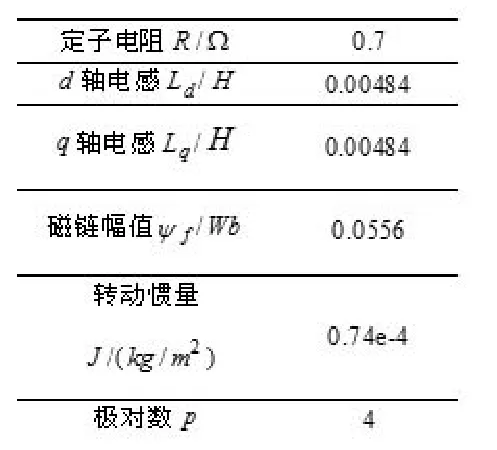
表1 电机参数
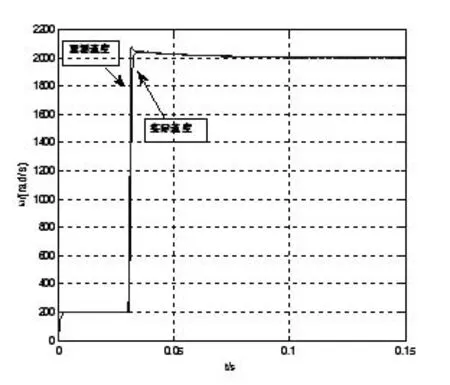
图5 变边界层滑模观测器的观测速度和实际速度响应曲线
图5为变边界函数滑模观测器转速由200r/min变化到2000r/min时的响应曲线,可以看出,该系统无论工作在低速还是高速,速度的观测都非常准确,并且动态响应快、稳态精度高。
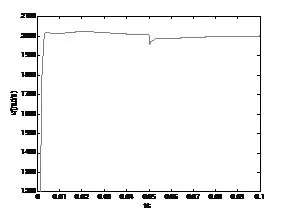
图6 突入负载时的速度响应
图6为在给定转速为2000r/min时,在0.05s负载突然变化时的速度响应曲线,由图6可以看出,在负载变化的扰动下,系统具有较强的鲁棒性。
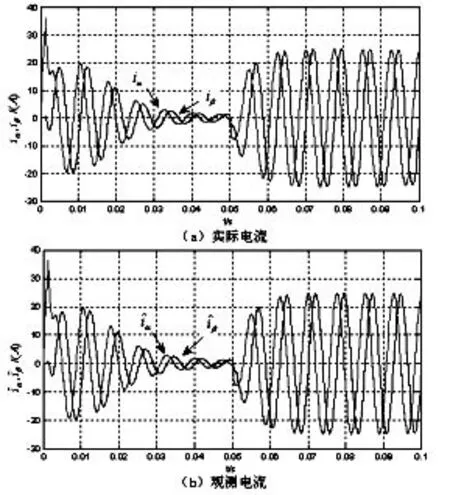
图7 实际电流与观测电流
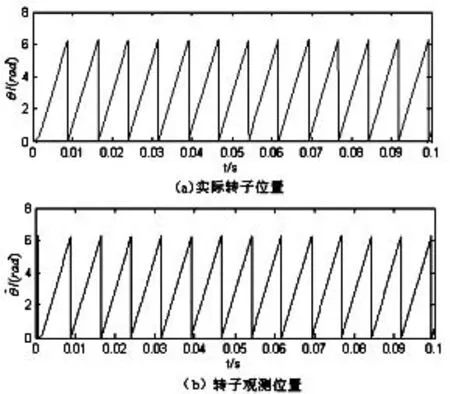
图8 实际转子位置与观察转子位置
图7和图8为转速为2000r/min并且外加负载扰动时电流、转子位置的实际值和观测值波形,由图可见,该方法能对电流和转子位置能进行实时有效的观测。
4 结论
提出了一种新型的永磁同步电机滑模观测器,该观测器采用变边界层宽度的S函数作为开关函数,并且根据永磁同步电机转速调整边界层宽度,同时结合永磁同步电机的数学模型,利用李亚普诺夫理论分析了观测器稳定性条件,该方法克服了传统滑模观测器对电机参数的依赖,有效削弱了系统抖振,通过仿真实验表明,该观测器不仅可以对电机速度和位置进行准确的观测,而且使PMSM调速系统具有很好的动态特性和稳态特性。
猜你喜欢
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04