
指针式仪表读数的机器视觉智能识别方法*
2017-11-23 02:09:26夏春华胡琳娜孟迎军
传感器与微系统 2017年11期
施 滢, 夏春华, 胡琳娜, 孟迎军
(1.南京理工大学 紫金学院,江苏 南京 210023; 2.农业部南京农业机械化研究所,江苏 南京 210014)
指针式仪表读数的机器视觉智能识别方法*
施 滢1, 夏春华2, 胡琳娜1, 孟迎军1
(1.南京理工大学紫金学院,江苏南京210023;2.农业部南京农业机械化研究所,江苏南京210014)
为快速准确地自动识别指针式仪表读数,采用机器视觉技术,结合减影法和Hough变换法对仪表读数进行智能识别。对指针式仪表图像进行图像二值化、形态学处理和边缘检测预处理;利用Hough变换检测仪表中的指针,计算得到指针方向和定位圆形,实现指针式仪表的智能识别。实验结果表明:读数识别的平均相对误差为0.91 %,精度较高,能较好地识别指针式仪表读数。
指针式仪表; 机器视觉; 智能识别; Hough变换
0 引 言
指针式仪表读数需要采用传统的人工识别方法,存在耗时耗力、精度低、效率低等问题。在不改造原有仪表表盘系统的基础上,采用机器视觉技术对指针式仪表进行自动识别的方法,主要有减影法[1~3]、Hough变换法[4~8]等方法。李治玮等人[1]提出了最大灰度相减法构造出无指针仪表图像模板,通过待测指针仪表图像与模板图像相减,得到仅包含指针的图像,即获得指针位置。减影法容易受光线干扰,造成输出的像素灰度值偏差,进而影响检测出的指针位置。Hough变换法通过提取指针中心线,得到指针与零刻度线的夹角,该方法虽对光线干扰造成的指针断裂有较好的鲁棒性,但运算量较大,影响实时性。
本文提出了改进的指针式仪表智能识别方法,通过固定在仪表设备前的相机获取指针式仪表图像,对获取的图像进行二值化、形态学和边缘检测处理的预处理,得到较为清晰的指针边缘轮廓图像;再利用Hough变换检测仪表中的指针,计算得到仪表圆心和指针方向,根据输入的最大量程,实现智能识别仪表读数。
1 指针式仪表图像预处理
1.1 图像二值化处理
为消除仪表图像采集过程中光源条件、光线变化等因素造成的仪表图像亮度不均匀现象,本文采用最大类间方差法(OTSU)[9,10]将原始采集图像进行二值化处理。该方法是按照输入图像的灰度将图像分成背景和目标,通过比较类间方差大小来区分背景和目标。
假设图像f(x,y)的大小为M×N,分割目标和背景的阈值为T,总平均灰度为μ,类间方差为g。目标像素点数占整幅图像像素数的比例为w0,平均灰度为μ0;背景像素点数占整幅图像像素数的比例为w1,平均灰度为μ1。若一幅图像中灰度值小于T的像素数为N0,大于T的像素数为
N1,则有

(1)

(2)
μ=w0×μ0+w1×μ1
(3)
g=w0(μ0-μ)2+w1(μ1-μ)2
(4)
将式(3)代入式(4)中,得到
g=w0w1(μ0-μ1)2
(5)
当g最大时,此时目标和背景之间的差异最大,即为阈值T最佳。假设二值化后的图像为g(x,y),则
(6)
1.2 图像形态学处理
由于图像二值化处理后得到的仪表指针的黑白图像包括边界点,为得到清晰的指针图像,需进行图像形态学处理。该处理通过图像腐蚀方法使边界向内部收缩,通过图像膨胀方法可以解决指针图像间断问题,得到完整的指针图像信息。腐蚀是对Z2上元素的集合A和集合B,B对A进行腐蚀定义为:A⊙B={z|(B)z⊆A};膨胀定义为:A⊕B={z|()z⊆A≠∅}。本文采用原点位于中心的3×3对称结构元素进行形态学开运算,可以平滑物体轮廓和消除突兀点。
1.3 边缘检测
本文采用Canny边缘检测算子[11],该算子有较好的抗噪声干扰和较精确的边缘定位。步骤为:1)用高斯滤波器对图像进行平滑;2)用一阶偏导有限差分计算梯度幅值和方向,对梯度幅值进行非极大值抑制;3)用双阈值算法检测和连接边缘,得到边缘图像。
2 仪表读数识别
2.1 仪表圆心的定位
采用Hough变换法,检测指针式仪表中的指针。主要思想为将直角坐标系中的直线转换到参数空间[12,13]。
直角坐标系中直线的方程为
y=kx+b
(7)
式中k为直线的斜率;b为截距。
参数空间表示为
ρ=xcosθ+ysinθ
(8)
式中ρ为原点到直线的垂直距离;θ为直线与x轴的角度。
直线上的所有点转换到参数空间会相交于一点,形成峰值。通过寻找累加器中最大值(最长直线),即得到指针式仪表的指针。
通过2幅指针不在同一位置的仪表图像进行逻辑运算,可以得到仪表表盘圆心的位置。本文采用仪表图像背景为0,指针目标为1,采用逻辑异或运算,得到仅含有2个不同位置的指针图像。根据Hough变换式(8),得到两指针的直线方程分别为
ρ1=xcosθ1+ysinθ1
(9)
ρ2=xcosθ2+ysinθ2
(10)
仪表圆心的坐标(x0,y0)如式(11)所示
(11)
2.2 指针方向判断
根据Hough变换式(8)找到表盘中最长的直线,即为指针,记录指针和零刻度线的夹角θ。由Hough变换得到的夹角θ存在2种可能:指针和零刻度线的夹角为θ;指针和零刻度线的夹角为θ+180°,因此,无法直接通过Hough变换得到针方向,需要进一步判断指针的方向。
在确定仪表表盘圆心的基础上,由零刻度线和圆心建立直角坐标系。Hough变换得到的指针的起始点和结束点以及建立的直角坐标系,即可确定指针方向。
2.3 最大量程的设定
为提高本文改进方法的广泛适用性,用户可输入最大量程。设用户给出需要智能读数的指针式仪表的最大量程R和最大量程所对应的最大夹角θm,则,此时指针式仪表的读数r为
(12)
3 实验结果及分析
为验证本文方法的实际识别效果,选取了电力系统变电站的指针式电流表进行实验与分析。电流表的参数为最大量程R=200 A、最大量程对应的最大夹角θ=90°。改进算法处理流程如图1所示。
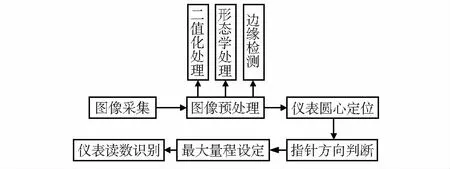
图1 指针式仪表识别处理流程
3.1 指针式仪表图像预处理实验
实验数据通过固定在电力系统变电站的电流表前的摄像装置获取,如图2(a)和图3(a)所示,其中,图2(a)为电流表的初始状态,图3(a)为电流表的指针偏转某一角度。根据图2(a)和图3(a)的原始指针式仪表图像,分别进行图像二值化反转处理,其处理结果如图2(b)和3(b)所示;再进行形态学处理,如图2(c)和3(c)所示;最后进行边缘检测,如图2(d)和3(d)所示。
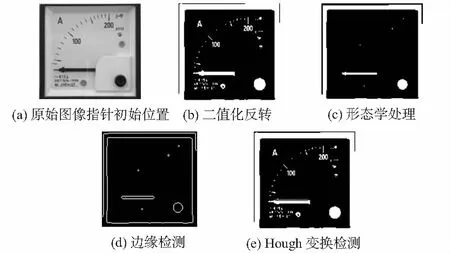
图2 指针式仪表初始位置及处理后图像

图3 指针式仪表偏转某一角度及处理后图像
3.2 指针式仪表圆心定位实验
如图2(e)和3(e)所示,为通过Hough变换检测得到的指针位置,图中直线为检测到的电流表指针;通过对图2(a)和图3(a)两幅指针在不同位置的图像进行异或运算,得到只包含2个指针的灰度图像,如图4(a)所示;对图4(a)进行形态学处理,结果如图4(b)所示;通过Hough变换得到两指针所在直线的位置(图像经反转),如图4(c)所示,图中两线为电流表指针;如图4(d)所示,两直线的延长线的交点为仪表圆心位置,图中点即为电流表圆心。

图4 指针式仪表圆心定位
3.3 实验结果分析
实验选取不同大小的实际电流值,将实验分为10组,每组实验根据本文方法进行5次读数识别。如表1所示,为通过多次测试,本文改进的指针式仪表智能识别实验结果,改进方法的智能识别的读数与实际值的平均相对误差为0.91 %,表明该方法精确性较好。
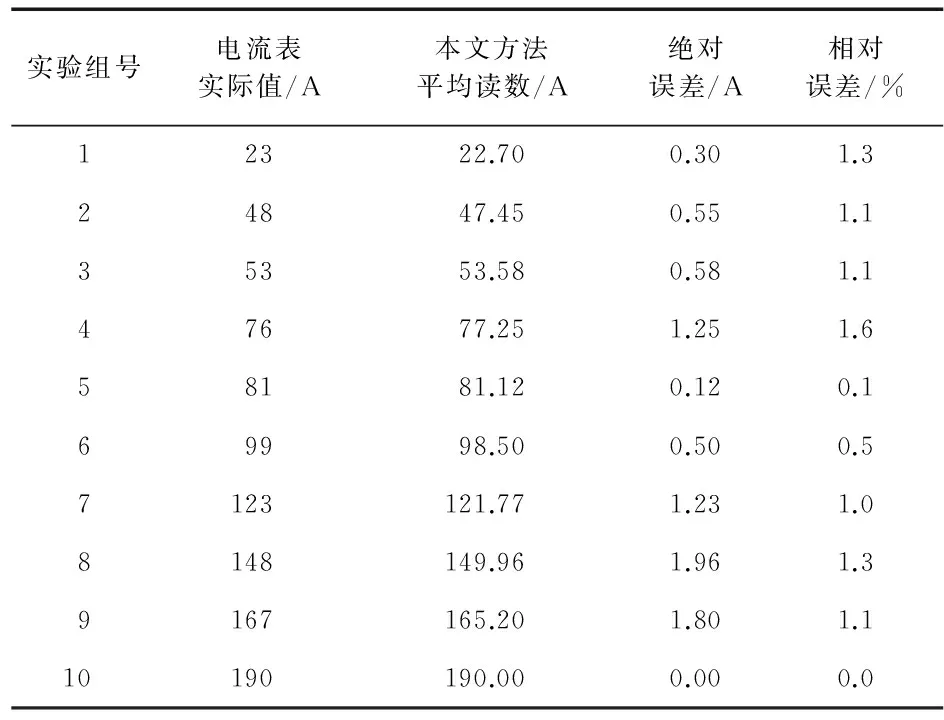
表1 本文方法实验结果
4 结束语
本文通过对指针式仪表图像进行预处理得到指针的边缘轮廓,利用Hough变换检测仪表中的指针,计算得到指针方向,并对仪表圆心进行定位,能够较好地完成指针式仪表的智能识别。通过对实际电力系统变电站的指针式电流表进行测试实验,实验结果表明:本文改进的智能识别方法,平均相对误差为0.91 %,精确度较高,具有较好的实际应用价值。
[1] 李治玮,郭 戈.一种新型指针仪表识别方法研究[J].微计算机信息,2007,23(11):113-114.
[2] 王红平,曹国华,苏成志.数字图像处理技术在计量仪表检定中的应用[J].长春理工大学学报,2004,27(3):13-15.
[3] Alegria E C,Serra A C.Automatic calibration of analog and digital measuring instruments using computer vision[J].IEEE Transactions on Instrumentation and Measurement,2000,49(1):94-99.
[4] 熊伟丽,周 寰,徐保国.指针式压力表自动检定系统的设计与实现[J].传感器与微系统,2009,28(8):105-107.
[5] 曾文静,张铁栋,万 磊,等.基于Hough变换的水下管道检测方法[J].仪器仪表学报,2012,33(01):76-84.
[6] Xu B,Liu D,Xu G,et al.A measurement method for contact angle based on Hough transformation[J].Measurement,2013,46(3):1109-1114.
[7] 周 泓,徐海儿,耿晨歌.基于HSI模型和Hough变换的指针式汽车仪表自动校验[J].浙江大学学报:工学版,2010,44(6):1108-1112.
[8] 滕今朝,邱 杰.利用Hough变换实现直线的快速精确检测[J].中国图象图形学报,2008,13(2):234-237.
[9] Ostu N.A threshold selection method from gray-level histograms[J].IEEE Trans on System,Man and Cybemetics,1979,6(3):62-66.
[10] 徐 青,范九伦.新的基于分解直方图的三维Otsu分割算法[J].传感器与微系统,2017,36(1):119-122,126.
[11] 赵 炯,朱海涛,屈剑平,等.基于OpenCV的圆心定位在地铁隧道变形监测中的应用[J].传感器与微系统,2013,32(11):139-142,145.
[12] 杨 莉,隋金雪,杜艳红,等.改进Hough变换在形状检测中的应用[J].传感器与微系统,2007,26(5):86-89.
[13] 段汝娇,赵 伟,黄松岭,等.一种基于改进Hough变换的直线快速检测算法[J].仪器仪表学报,2010,31(12):2774-2780.
Intelligentrecognitionmethodforreadingofpointerinstrumentbasedonmachinevision*
SHI Ying1, XIA Chun-hua2, HU Lin-na1, MENG Ying-jun1
(1.ZijinCollege,NanjingUniversityofScienceandTechnology,Nanjing210023,China;2.NanjingResearchInstituteforAgriculturalMechanization,MinistryofAgriculture,Nanjing210014,China)
In order to identify the reading of pointer instrument automatically and accurately,an intelligent recognition method of pointer instrument is proposed based on machine vision.The reading of pointer instrument is recognized based on machine vision,combined with image subtraction and Hough transformation.Pointer instrument image is preprocessed by image binarization,morphological processing and edge detection.Direction of the pointer and the position of the circle are determined by Hough transformation,in order to realize intelligent recognition method of pointer instrument.Experimental result shows that the average relative error is 0.91 %,the precision is high,the reading of pointer instrument can be recognized accurately by this method.
pointer instrument; machine vision; intelligent recognition;Hough transformation
10.13873/J.1000—9787(2017)11—0047—03
TP 391.4
A
1000—9787(2017)11—0047—03
2017—09—06
中央级公益性科研院所基本科研业务费专项项目(S201715)
施 滢(1990-),女,硕士,主要研究方向为机器视觉与图像处理,E—mail:shiying05@163.com。
猜你喜欢
青海草业(2022年2期)2022-07-23 09:23:12
中国公路(2017年19期)2018-01-23 03:06:36
中国公路(2017年15期)2017-10-16 01:32:04
中国公路(2017年9期)2017-07-25 13:26:38
中国公路(2017年7期)2017-07-24 13:56:40
中学生数理化·中考版(2016年10期)2016-12-22 18:30:54
现代工业经济和信息化(2016年2期)2016-05-17 05:34:23
黑龙江科学(2015年11期)2015-03-27 03:38:17
电测与仪表(2014年16期)2014-04-22 05:19:56
电测与仪表(2014年18期)2014-04-04 12:33:04
