
下肢康复机器人训练对脑卒中偏瘫患者下肢运动功能的康复作用
2017-11-22 00:45:54卢建亮陈卓铭吴浩杨伟陈辉煌
中国现代神经疾病杂志 2017年5期
卢建亮 陈卓铭 吴浩 杨伟 陈辉煌
·神经康复·
下肢康复机器人训练对脑卒中偏瘫患者下肢运动功能的康复作用
卢建亮 陈卓铭 吴浩 杨伟 陈辉煌
目的 探讨下肢康复机器人训练对脑卒中偏瘫患者下肢运动功能的康复作用。方法 共60例发病<6个月的脑卒中偏瘫患者随机接受常规康复训练联合减重步行训练(BWSTT组,30例)或常规康复训练联合下肢康复机器人训练(Robot组,30例),分别于训练前和训练8周时采用Fugl⁃Meyer下肢评价量表(FMA⁃LE)评价下肢运动功能、Berg平衡量表(BBS)评价平衡功能、下肢康复机器人力矩反馈系统评价下肢肌力。结果 与训练前相比,两组患者训练8周时FMA⁃LE(P=0.000)和BBS(P=0.000)评分、步态周期中患侧髋关节(P=0.000)和膝关节(P=0.000)反馈力矩值均增加;与BWSTT组相比,训练8周时Robot组仅步态周期中患侧髋关节(P=0.000)和膝关节(P=0.000)反馈力矩值增加。结论 常规康复训练联合减重步行训练和下肢康复机器人训练均可以改善脑卒中偏瘫患者下肢运动功能,下肢康复机器人训练在提高下肢肌力方面优于减重步行训练。
卒中; 偏瘫; 运动障碍; 下肢; 机器人; 康复
脑卒中患者运动障碍严重影响日常生活活动能力(ADL),故康复治疗的重要目标之一是恢复行走能力。Wade等[1]的研究显示,约55%脑卒中患者予康复治疗3个月后可以恢复独立行走。脑卒中急性期由于受到身体虚弱、肌力和平衡功能等因素的影响,步行训练较为困难;即使至恢复期,由于存在异常运动模式,难以完成正常生理步态的步行训练。下肢康复机器人技术是近年国内外新兴的步态训练技术,对脑卒中患者康复治疗开始时间、频率和持续时间产生巨大影响。下肢康复机器人技术通过减重和标准化正常生理步态的反复训练,使患者能够进行科学有效的康复训练。本研究采用常规康复训练联合下肢康复机器人训练对脑卒中偏瘫患者下肢运动功能进行训练,以探讨下肢康复机器人训练对脑卒中偏瘫患者下肢运动功能的康复作用。
资料与方法
一、临床资料
1.纳入标准 (1)脑卒中的诊断符合1995年第四届全国脑血管病学术会议制定的标准,并经头部CT和(或)MRI检查证实。(2)均为首次发病。(3)年龄30~80岁。(4)病程 <6 个月。(5)均意识清楚,生命体征平稳,无认知功能障碍。(6)单侧肢体偏瘫。(7)本研究经暨南大学附属第一医院道德伦理委员会审核批准,所有患者或其家属均知情同意并签署知情同意书。
2.排除标准 (1)意识障碍和严重认知功能障碍伴严重抑郁等心理障碍。(2)严重下肢关节病变或骨性关节炎、共济失调导致的行走障碍。(3)合并心、肝、肾等重要脏器功能障碍或衰竭。(4)治疗依从性差。
3.一般资料 选择2015年6月-2016年7月在暨南大学附属第一医院神经内外科住院治疗和康复科进行康复训练的脑卒中偏瘫患者共60例,男性44例,女性 16例;年龄31~80岁,平均(58.23±13.48)岁;病程 8 ~ 159 d,中位病程 54.00(15.00,92.50)d;缺血性卒中30例(50%),出血性卒中30例(50%);左侧肢体偏瘫32例(53.33%),右侧肢体偏瘫28例(46.67%)。所有患者采用随机数字表法随机分为两组,即常规康复训练联合减重步行训练组(BWSTT组)和常规康复训练联合下肢康复机器人训练组(Robot组)。(1)BWSTT组:30例,男性23例,女性7例;年龄32~80岁,平均(58.13±13.91)岁;病程8~ 130 d,中位病程28.50(12.00,95.25)d;缺血性卒中14例(46.67%)、出血性卒中16例(53.33%);左侧肢体偏瘫17例(56.67%),右侧肢体偏瘫13例(43.33%)。(2)Robot组:30例,男性21例,女性9例;年龄31~79岁,平均(58.30±13.28)岁;病程11~159 d,中位病程 59.00(21.50,92.00)d;缺血性卒中16例(53.33%),出血性卒中14例(46.67%);左侧肢体偏瘫15例(50%),右侧肢体偏瘫15例(50%)。两组患者一般资料比较,差异无统计学意义(均P>0.05,表1),具有可比性。
二、研究方法
1.BWSTT组 采用常规康复训练联合减重步行训练。(1)常规康复训练:参照《中国脑卒中康复治疗指南(2011完全版)》[2],主要包括物理治疗、作业疗法和言语治疗,其中,物理治疗又分为神经发育疗法、运动再学习训练、电刺激治疗、针灸治疗等。常规康复训练运动训练方式包括良肢位摆放、翻身训练、转移训练、主动控制训练、关节松动训练和牵伸训练、肌力训练、站立训练及日常生活活动能力训练。每天 60 min、每周 5 d,连续 8周。(2)减重步行训练:患者直立位,训练前先将躯干通过减重悬吊衣固定,再将减重悬吊衣固定于天轨两条轨道上,拉紧提高悬吊绳以减轻体重对下肢的压力,嘱患者双脚站立于地面上,沿轨道方向进行步行训练,行走过程中康复治疗师给予语言和手法指导。每天20 min、每周5 d,连续8周。
2.Robot组 采用常规康复训练联合下肢康复机器人训练。常规康复训练方法同BWSTT组。下肢康复机器人训练采用上海璟和技创机器人有限公司生产的Flexbot⁃B型多体位智能康复训练机器人训练系统,其中,调速模式调整为正常生理步态的步行训练模式,康复机器人双下肢髋膝电机带动患者下肢协调运动以模拟正常生理步态行走。训练前将患者躯干通过减重悬吊衣固定,根据下肢长度调节康复机器人髋膝关节之间长度,固定双足,调节康复机器人直立角度至70°。选择视觉反馈场景和训练参数,每分钟42步,训练时间为20 min。如果训练时出现患者身体不适或康复机器人故障,则立即启动紧急制动系统停止训练。每天20 min、每周5 d,连续8周。
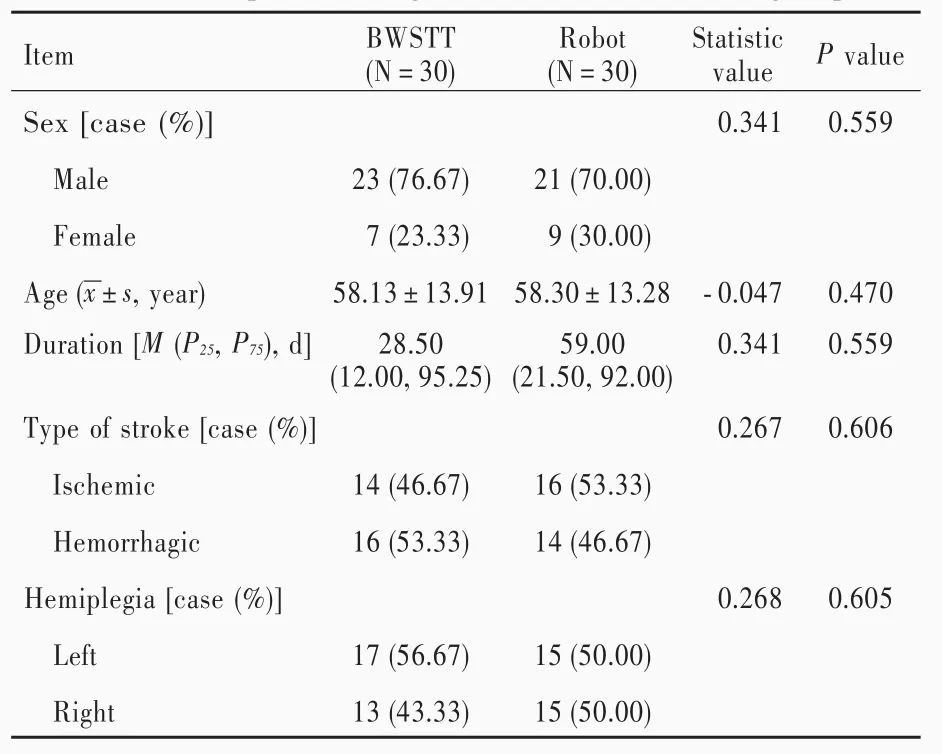
表1 两组患者一般资料的比较Table 1. Comparison of general data between 2 groups
3.下肢运动功能评价 所有患者均于训练前和训练8周时由同一位对分组不知情的康复治疗师采用 Fugl⁃Meyer下肢评价量表(FMA⁃LE)评价下肢运动功能、Berg平衡量表(BBS)评价平衡功能、下肢康复机器人力矩反馈系统评价下肢肌力。(1)FMA⁃LE量表:包括仰卧位跟腱和膝腱反射活动、下肢屈肌联带运动和下肢伸肌联带运动、坐位伴联带运动、站立位分离运动、坐位正常反射、仰卧位跟⁃膝⁃胫试验共计6大项17小项内容,每项评分2分,总评分为34分,评分越低、下肢运动功能越差。(2)BBS量表:包括坐位站起、无支撑站立、无靠背坐位、站立位坐下、转移、闭目站立、双脚并拢站立、上肢向前伸展并向前移动、自地面拾起物品、转身向后看、转身360°、将一只脚放在台阶或凳子上、双脚一前一后站立、单脚站立共14项内容,每项分为0~4分共5级,总评分56分,评分越低、平衡功能越差。(3)下肢康复机器人力矩反馈系统:根据髋关节和膝关节处感受器对患者行走过程中肌力进行反馈分析,实时显示步态周期中髋关节反馈力矩值(HJTV)和膝关节反馈力矩值(KJTV),评分越低、肌力越差。
4.统计分析方法 本研究数据采用SPSS 20.0统计软件进行处理与分析。计数资料以相对数构成比(%)或率(%)表示,采用χ2检验。呈正态分布的计量资料以均数±标准差(x±s)表示,采用两独立样本的t检验;训练前后运动功能的比较采用前后测量设计的方差分析。呈非正态分布的计量资料以中位数和四分位数间距[M(P25,P75)]表示,采用Mann⁃Whitney U检验。以P≤0.05为差异具有统计学意义。
结 果
与训练前相比,两组患者训练8周时FMA⁃LE(P=0.000)和BBS(P=0.000)评分、步态周期中患侧髋关节(P=0.000)和膝关节(P=0.000)反馈力矩值均增加,表明无论减重步行训练还是下肢康复机器人训练均可改善脑卒中偏瘫患者下肢运动功能(表2,3)。与BWSTT组相比,训练8周时Robot组患者步态周期中患侧髋关节(P=0.004)和膝关节(P=0.000)反馈力矩值增加,而 FMA⁃LE(P=0.118)和BBS(P=0.159)评分差异无统计学意义,表明下肢康复机器人训练在提高脑卒中偏瘫患者下肢肌力方面优于减重步行训练,而在改善下肢运动模式和平衡功能方面无明显差异(表2,3)。
讨 论
脑卒中患者下肢运动障碍主要表现为肌力下降、肌张力异常、步态不对称、重心转移障碍、各关节活动受限等[3]。本研究无论常规康复训练联合减重步行训练还是联合下肢康复机器人训练均可改善脑卒中偏瘫患者下肢运动功能,表明康复治疗对提高脑卒中患者下肢运动功能具有重要作用。《中国脑卒中康复治疗指南(2011完全版)》[2]推荐减重步行训练用于脑卒中后行走障碍患者,可以作为传统康复训练的辅助方法(Ⅰ级推荐,A级证据)。在本研究中,BWSTT组采用常规康复训练联合减重步行训练,减轻行走过程中患者体重对患侧下肢的压力,对患侧下肢肌力要求低,可以早期进行行走训练,且减重步行训练无跌倒风险,增加对患者行走训练的保护作用,使患者能够将注意力集中于患侧下肢运动,减少异常运动模式;然而,减重步行训练缺乏视觉反馈、关节运动反馈和本体感觉反馈等,对机体刺激较少,同时也不能将患者的动态治疗效果和恢复情况转化为客观数据反馈给康复治疗师。Robot组采用常规康复训练联合下肢康复机器人训练,后者自带减重系统、智能运动反馈系统和视觉反馈系统,在减重状态下,患者通过机械腿的带动以接近正常生理步态的模式进行步行训练,重心位于中线,骨盆和躯干运动稳定,可以重复训练。研究显示,脑卒中偏瘫患者在行走过程中存在下肢分阶段活动,下肢康复机器人训练可以激活正常肌肉活动顺序,促进行走过程中下肢连续运动[4]。

表2 两组患者训练前后下肢运动功能的比较(x±s,评分)Table 2. Comparison of lower limb motor function before and after training between 2 groups(x±s,score)
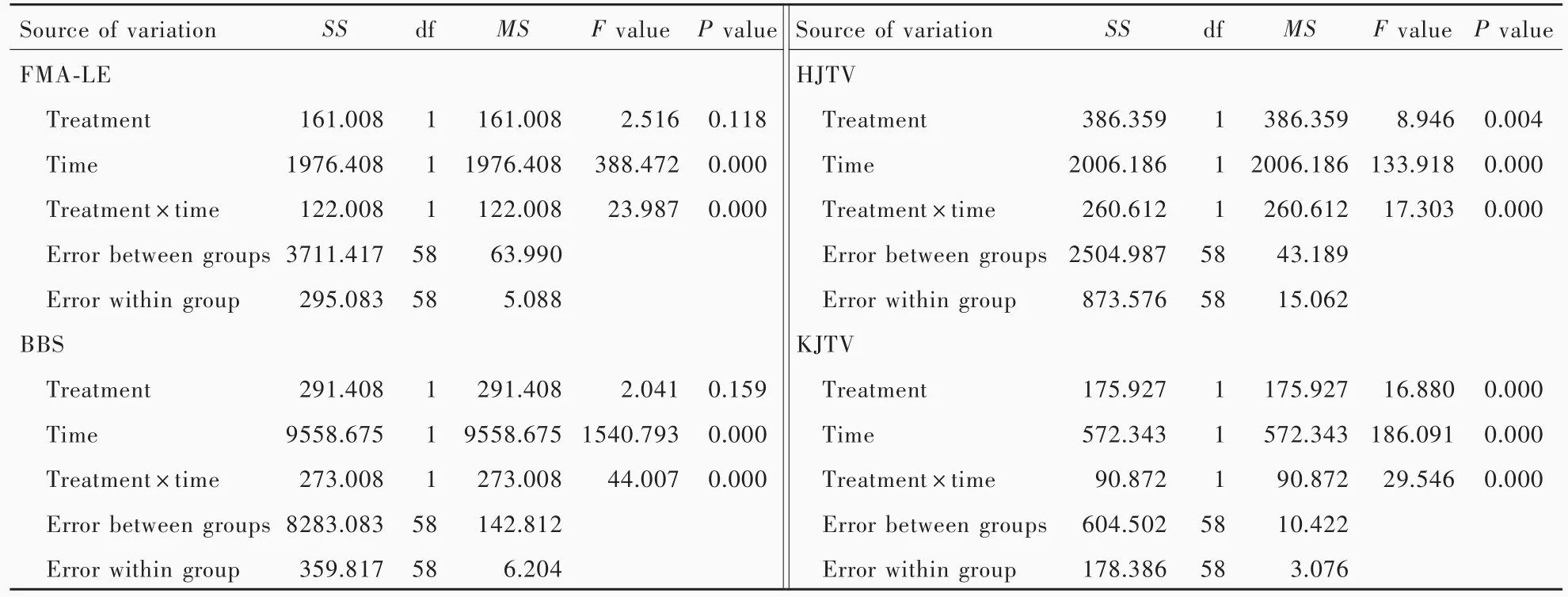
表3 两组患者训练前后下肢运动功能的前后测量设计的方差分析表Table 3. ANOVA for pretest⁃posttest measurement design of lower limb motor function before and after training in 2 groups
Fugl⁃Meyer评价量表是目前国际公认的、标准化评价脑卒中偏瘫患者运动功能的客观指标[5]。然而本研究训练8周时Robot组患者FMA⁃LE评分与BWSTT组差异无统计学意义,表明下肢康复机器人训练与减重步行训练在改善脑卒中偏瘫患者下肢运动模式方面无明显差异,可能与本研究观察时间较短有关;也可能是由于下肢康复机器人训练通过输入正常生理步态模式以抑制下肢异常运动模式并诱导正常运动模式,从而改善下肢运动模式和平衡功能,而减重步行训练通过康复治疗师语言和手法指导以纠正下肢异常运动模式并强化正常运动模式,两种康复治疗方法均可较好促进脑卒中偏瘫患者下肢运动模式向正常模式发展。
脑卒中康复过程中脑组织对存活组织进行结构和功能重塑,并向脊髓运动神经元发出纤维以完成运动功能康复,运动功能康复程度取决于存活组织结构大小和功能。成人神经元不可再生,通过轴突发芽、替代和潜在突触活化等机制,完成结构和功能重塑[6]。神经元可以在不断学习新技能的基础上,重新获得或恢复功能,但这一过程的实现需要通过反复刺激、输入各种信息、不断体验模仿、深化学习,下肢康复机器人通过智能运动反馈系统不断刺激患者本体感觉和下肢运动系统,通过视觉反馈系统持续刺激,使神经元获得感觉、运动和注意信息,增强并改善脑神经分析处理能力,同时,在一定程度上完善和促进脑卒中患者视觉通路、本体感觉通路和运动通路等。张彪等[7]采用意大利Pro⁃Kine Line 254P平衡反馈训练仪检测具备站立条件的脑卒中偏瘫患者,前庭觉、本体感觉和视觉分别占61.05%、31.39%和31.59%,表明在维持脑卒中偏瘫患者平衡功能的感知觉中视觉反馈系统具有重要作用。脑卒中偏瘫患者早期站立时患侧运动功能较差,加之本体感觉障碍,依靠视觉系统代偿维持平衡功能十分重要,不同站立阶段视觉反馈训练可以有效改善平衡功能。下肢康复机器人训练系统自带视觉反馈系统,可以模拟不同场景(如沙滩、公路、森林等)步行训练,刺激大脑皮质运动中枢,促进姿势和身体各部分信息整合,同时控制主动肌与拮抗肌力量,促进各肌群之间的协调能力,提高平衡功能[8]。在本研究中,两组患者训练8周时BBS评分高于治疗前且差异有统计学意义,表明减重步行训练和下肢康复机器人训练均可以改善脑卒中偏瘫患者下肢运动功能;而训练8周时Robot组患者BBS评分与BWSTT组差异无统计学意义,表明下肢康复机器人训练与减重步行训练在改善脑卒中偏瘫患者平衡功能方面无明显差异。可能是由于平衡功能首先提高躯体功能的稳定,然后提高下肢肌力和协调能力,两种康复治疗方法均有减重悬吊方式,对躯体稳定有相同的刺激,故对平衡功能的改善具有一致性。随着康复训练时间的延长,患者躯体功能稳定,方可逐渐显示出两种方法对平衡功能的差异。
本研究Robot组患者训练8周时步态周期中患侧髋关节和膝关节反馈力矩值均较BWSTT组增加且差异有统计学意义,表明下肢康复机器人训练较减重步行训练更显著增加下肢肌力,与既往研究结论相一致[9]。可能是由于减重步行训练无下肢相应的抗阻运动,仅是抗部分重力运动,故对下肢肌力增加的刺激作用弱于下肢康复机器人训练。下肢康复机器人训练通过智能运动反馈系统根据下肢肌力实时调整并进行主动运动、被动运动和助力运动,从而使患者发挥最大潜力。此外,下肢康复机器人训练还可以提供对称性康复训练模式,有助于提高下肢步态同步性,由于双侧肢体运动具有协同匹配效应,这种对称性训练可以使患侧下肢模仿健侧运动,有助于患侧肢体康复。相关研究显示,下肢康复训练的对称性与步态稳定性呈正相关[10]。
多项研究显示,下肢康复机器人训练在脑卒中下肢运动功能康复方面具有无法替代、无可比拟的优势[11⁃16],但该项技术设备和医疗费用昂贵,难以在临床普及,因此常规康复训练依然是重要、不可或缺的方法[17]。
综上所述,常规康复训练联合减重步行训练或下肢康复机器人训练均可以显著改善脑卒中偏瘫患者下肢运动功能,下肢康复机器人训练在提高下肢肌力方面优于减重步行训练。下肢康复机器人训练可以提供高强度、持续性、集中性、任务导向性、对称性的反复模拟正常生理步态模式的训练,并自带减重系统、智能运动反馈系统和视觉反馈系统,给予机体更多刺激,从而提高脑卒中偏瘫患者下肢运动功能,但是康复治疗效果尚待长期随访验证,训练8周时下肢康复机器人训练与减重步行训练在下肢运动模式和平衡功能方面疗效相当。
[1]Wade DT,Wood VA,Heller A,Maggs J,Langton HR.Walking after stroke:measurement and recovery over the first 3 months.Scand J Rehabil Med,1987,19:25⁃30.
[2]Rehabilitation Study Group;Cerebrovascular Disease Study Group, Chinese Society of Neurology, Chinese Medical Association;the Ministry ofHealth Stroke Screening and Prevention Engineering Committee Office.Guidelines for stroke rehabilitation treatment in China(2011).Zhongguo Kang Fu Li Lun Yu Shi Jian,2012,18:301⁃318[.中华医学会神经病学分会神经康复学组,中华医学会神经病学分会脑血管病学组,卫生部脑卒中筛查与防治工程委员会办公室.中国脑卒中康复治疗指南(2011完全版).中国康复理论与实践,2012,18:301⁃318.]
[3]Zhao J,Zhang T,Lu HT.Application of gait analysis for stroke patients with hemiparesis.Zhongguo Kang Fu Li Lun Yu Shi Jian,2013,19:655⁃657[.赵军,张通,芦海涛.脑卒中偏瘫步态分析的临床应用.中国康复理论与实践,2013,19:655⁃657.]
[4]van Kammen K,Boonstra AM,van der Woude LH,Reinders⁃Messelink HA,den Otter R.The combined effects of guidance force,bodyweight support and gait speed on muscle activity during able⁃bodied walking in the Lokomat.Clin Biomech,2016,36:65⁃73.
[5]Sang DC,Ji SR,Zhang Y,Jin P.Application of Fugl⁃Meyer scale for the evaluation of stroke rehabilitation efficacy in community.Zhongguo Kang Fu Yi Xue Za Zhi,2007,22:264⁃265[.桑德春,纪树荣,张缨,金萍.Fugl⁃Meyer量表在社区脑卒中康复疗效评定中的应用.中国康复医学杂志,2007,22:264⁃265.]
[6]Rossini PM,Calautti C,Pauri F,Baron JC.Post⁃stroke plastic reorganisation in the adult brain.Lancet Neurol,2003,2:493⁃502.
[7]Zhang B,Liu HY,Wu JY,Xu ZQ,Zhang K.Effects of sensory integration mode on balance ability of patients with hemiplegia.Zhongguo Kang Fu Yi Xue Za Zhi,2016,31:973⁃978[.张彪,刘鸿宇,武俊英,许志强,张科.感觉整合模式对偏瘫患者维持平衡的作用.中国康复医学杂志,2016,31:973⁃978.]
[8]Zhao YN,Yang F,Hao ZW,Li JM,Li JN.Effects of virtual reality technology combined with rehabilitation robot training on the motor function and event⁃related potentials in hemiplegic patients with cerebral infarction.Zhongguo Quan Ke Yi Xue,2015,18:2907⁃2910[.赵雅宁,杨芳,郝正玮,李建民,李佳宁.虚拟现实技术联合康复机器人训练对脑梗死偏瘫患者运动功能及事件相关电位的影响研究.中国全科医学,2015,18:2907⁃2910.]
[9]Gao CH,Huang XL,Huang J,Wang SQ,Xiao F.Effect of lower limb rehabilitation robot training on lower limb function in hemiplegic patients with early stroke.Zhongguo Kang Fu Yi Xue Za Zhi,2014,29:351⁃353[.高春华,黄晓琳,黄杰,王盛强,肖锋.下肢康复机器人训练对早期脑卒中偏瘫患者下肢功能的影响.中国康复医学杂志,2014,29:351⁃353.]
[10]Coenen P,van Werven G,van Nunen MP,Van Dieën JH,Gerrits KH,Janssen TW.Robot⁃assisted walking vs overground walking in stroke patients:an evaluation of muscle activity.J Rehabil Med,2012,44:331⁃337.
[11]Krishnan C,Kotsapouikis D,Dhaher YY,Rymer WZ.Reducing robotic guidance during robot⁃assisted gait training improves gait function:a case report on a stroke survivor.Arch Phys Med Rehabil,2013,94:1202⁃1206.
[12]Schwartz I,Sajin A,Fisher I,Neeb M,Shochina M,Katz⁃Leurer M,Meiner Z.The effectiveness of locomotor therapy using robotic⁃assisted gait training in subacute stroke patients:a randomized controlled trial.PM R,2009,1:516⁃523.
[13]Hornby TG,Campbell DD,Kahn JH,Demott T,Moore JL,Roth HR.Enhanced gait⁃related improvements after therapist⁃versus robotic⁃assisted locomotor training in subjects with chronic stroke:a randomized controlled study.Stroke,2008,39:1786⁃1792.
[14]Yao TT,Wang NH,Chen ZM.Evidence⁃based research of movement function training in stroke patients.Zhongguo Kang Fu Yi Xue Za Zhi,2010,25:565⁃570[.姚滔涛,王宁华,陈卓铭.脑卒中运动功能训练的循证医学研究.中国康复医学杂志,2010,25:565⁃570.]
[15]Liu YP,Luo J,Yang JH.Effects of lokomat robotic⁃assisted gait training combined with drop foot stimulator on gait function in patients with stroke.Zhongguo Kang Fu Li Lun Yu Shi Jian,2016,22:921⁃926[.刘燕平,罗佳,杨京辉.足下垂助行仪联合Lokomat下肢康复机器人对脑卒中患者步行功能的疗效.中国康复理论与实践,2016,22:921⁃926.]
[16]Zheng P,Huang GZ,Peng SH.Effects oflower limb rehabilitation robot in improving lower limb muscle strength and motion dysfunction of stroke patients:a clinical research.Zhongguo Kang Fu Yi Xue Za Zhi,2016,31:955⁃959[.郑彭,黄国志,彭生辉.下肢康复机器人对改善脑卒中偏瘫患者下肢肌力及运动功能障碍的临床研究.中国康复医学杂志,2016,31:955⁃959.]
[17]Zhang WM,Yang S,Wang YJ,He X,Lu JC,Xie Q.Effect of modified constraint⁃induced movement therapy on the activities of daily living of patients with acute stroke.Zhongguo Xian Dai Shen Jing Ji Bing Za Zhi,2015,15:280⁃284[.张伟明,杨帅,王轶钧,何鑫,陆建春,谢青.改良强制性运动疗法对急性脑卒中患者日常生活活动能力的影响.中国现代神经疾病杂志,2015,15:280⁃284.]
Effect of lower limb rehabilitation robot on lower limb motor function of hemiplegic patients after stroke
LU Jian⁃liang,CHEN Zhuo⁃ming,WU Hao,YANG Wei,CHEN Hui⁃huang
DepartmentofRehabilitation,the FirstAffiliated HospitalofJi'nan University,Guangzhou 510630,Guangdong,China
Objective To observe the rehabilitation effect of lower limb rehabilitation robot training on the lower limb motor function of hemiplegic patients after stroke. Methods A total of 60 stroke patients(duration<6 months)accepted conventional rehabilitation training combined with body weight support treadmill training(BWSTT group,N=30)or conventional rehabilitation training combined with lower limb rehabilitation robot training(Robot group,N=30).Fugl⁃Meyer Assessment Scale for Lower Extremity(FMA⁃LE)was used to evaluate lower limb motor function.Berg Balance Scale(BBS)was used to evaluate balance function.Lower limb rehabilitation robot torque feedback system was used to evaluate lower limb muscle strength.All evaluations were performed before and after 8⁃week training.Results Compared with before training,the FMA⁃LE score(P=0.000),BBS score(P=0.000),hemiplegic side of hip joint feedback torque value(HJTV,P=0.000)and knee joint feedback torque value(KJTV,P=0.000)were increased in both groups after 8⁃week training.Compared with BWSTT group,the hemiplegic side of HJTV(P=0.000)and KJTV(P=0.000)were increased in Robot group after 8⁃week training,while the FMA⁃LE score(P=0.118)and BBS score(P=0.159)had no statistically significant difference between 2 groups.Conclusions The lower limb rehabilitation robot or body weight support treadmill training combined with conventional rehabilitation training could improve the lower limb motor function of hemiplegic patients after stroke.The lower limb rehabilitation robot training was better than body weight support treadmill training on the recovery of lower limb muscle strength.
Stroke; Hemiplegia; Movementdisorders; Lower extremity; Robotics;Rehabilitation
CHEN Zhuo⁃ming(Email:zm120tchzm@qq.com)
10.3969/j.issn.1672⁃6731.2017.05.004
国家科技部“十二五”科技支撑计划子课题(项目编号:2013BAI10B01);广东省广州市科技计划重大项目(项目编号:2012Y2-00023)
510630 广州,暨南大学附属第一医院康复科
陈卓铭(Email:zm120tchzm@qq.com)
This study was supported by the National"Twelfth Five⁃Year"Science and Technology Support Program(No.2013BAI10B01)and Guangzhou Science and Technology Major Plan Program of Guangdong Province,China(No.2012Y2-00023).
2017⁃03⁃30)
猜你喜欢
中国民间疗法(2021年19期)2021-11-20 06:22:38
今日农业(2021年4期)2021-06-09 06:59:58
装备制造技术(2020年11期)2021-01-26 00:38:58
公民与法治(2020年20期)2020-11-27 01:44:46
中华养生保健(2020年2期)2020-11-16 00:49:06
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
制造业自动化(2017年2期)2017-03-20 14:26:12
湖北体育科技(2016年11期)2016-02-27 15:25:12
中国康复理论与实践(2015年10期)2015-12-24 05:42:45
中国中医药现代远程教育(2014年14期)2014-03-01 04:27:23
