一种电力信息通信机房智能巡检机器人设计与应用
2017-11-17 02:14:25杨连营汪文杰陈秀国
微处理机 2017年5期
杨连营,杨 亚,汪文杰,陈秀国
(国网铜陵供电公司,铜陵244000)
一种电力信息通信机房智能巡检机器人设计与应用
杨连营,杨 亚,汪文杰,陈秀国
(国网铜陵供电公司,铜陵244000)
目前,电力信息通信整体呈现开放、泛在、智能、互动、可信特征,全面支撑智能电网能源与信息的交互,随着供电优质服务建设和农配网升级改造的持续推进,国家电网公司对电力信息通信机房管理的覆盖面、集成度、实时性、安全性提出了更高的要求,传统的人工巡检方式已经无法满足电力信息通信机房的安全保障需求。为了克服电力信息通信机房传统人工巡检方式耗时费力、存在巡视盲区、不具实时性等问题,通过对机器人平台、轨道敷设、功能单元、辅助单元的实验方案进行对比,设计了一种智能巡检机器人,现场验证证实该智能巡检机器人能够代替人工巡检,具有显著的经济和社会效益,具备推广价值。
电力信息通信机房;智能巡检机器人;人工巡检
1 引言
目前,电力信息通信整体呈现开放、泛在、智能、互动、可信等特征,全面支撑智能电网能源与信息的交互,由电网业务的支撑平台转变为支撑电网、电源、负荷、客户之间交互的综合服务平台,成为智能电网支撑全球能源互联网的基础载体[1-4]。电力信息通信机房承载着电力营销、调度、运行、检修等重要业务,是电网企业的关键性基础设施。
然而,电力信息通信机房的传统巡检采用人工方式,该种巡检方式存在以下弊端:
(1)巡检耗时费力。每座机房每次安排两人巡视,巡检周期为1-3次/天,巡视时间15min/次,由于电力信息通信机房分布不集中,巡检人员开展巡视工作须在各机房之间反复折返,耗费大量人力物力。
(2)存在巡视盲区。机房内部署了大量电力信息交换与安全控制设备,人工巡视无法全面覆盖。
(3)不具有实时性。机房内的环境参数无法第一时间反馈给运行维护人员,一旦温湿度长时间超标,将会出现设备断电、空调停机、机房漏水等情况,对机房安全造成极大隐患,甚至影响电网运行安全。
为了缩短人工巡检时间,提高巡检工作效率,在借鉴轨道智能巡检机器人的基础上,针对电力信息通信机房的特点,研制了一种电力信息通信机房的智能巡检机器人。
2 智能巡检机器人的设计思路
2.1 设计思路
一种电力信息通信机房智能巡检机器人具备以下主要功能[5-8]:
(1)行驶功能:机器人本体能够在机房内平稳行驶,在接受控制平台直行、转弯、变速、停止命令时,偏移角度小于8°;具有循迹避障能力,在巡检过程中,能自动感知并躲避障碍物。
(2)温湿度监测功能:通过在机器人本体上安装温湿度传感器,实现对机房内温湿度的精确采集、实时监测预警及回溯分析。
(3)视频采集传输功能:通过在机器人本体安装摄像头并设计视频采集传输模式,对机房态势进行实时监控。
(4)巡检时间:在实现以上功能的基础上,智能机器人巡检时间优于人工巡检。
2.2 方案设计框图
根据机器人设计思路,画出方案框图,如图1。
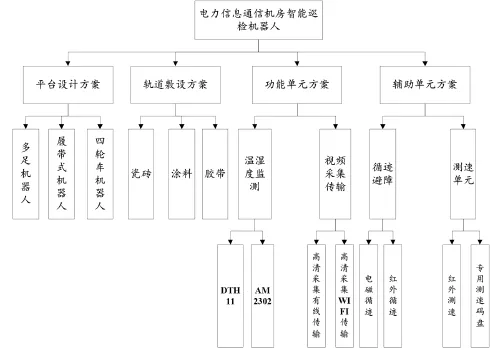
图1 :电力信息通信机房智能巡检机器人方案框图
3 方案验证
根据电力信息通信机房的巡检要求,对机器人各模块进行设计并验证。
(1)平台设计方案
电力信息通信机房环境简单,故选择三种灵巧轻便的机器人作为搭载巡检设备的平台,分别是多足机器人、履带式机器人、四轮车机器人。如图2所示。
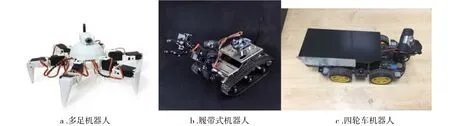
图2 :三种机器人
通过在机器人底部安装二极管,感应轨道轨迹,保障平稳运行,并以三种机器人运行时的偏移角度为目标,考察机器人的运行平稳度。
实验方法:分别将多足机器人、履带式机器人、四轮车机器人放置在预设轨道上运行,测量机器人在轨道上运行的偏移角度,实验次数为10次。实验结果见表1。
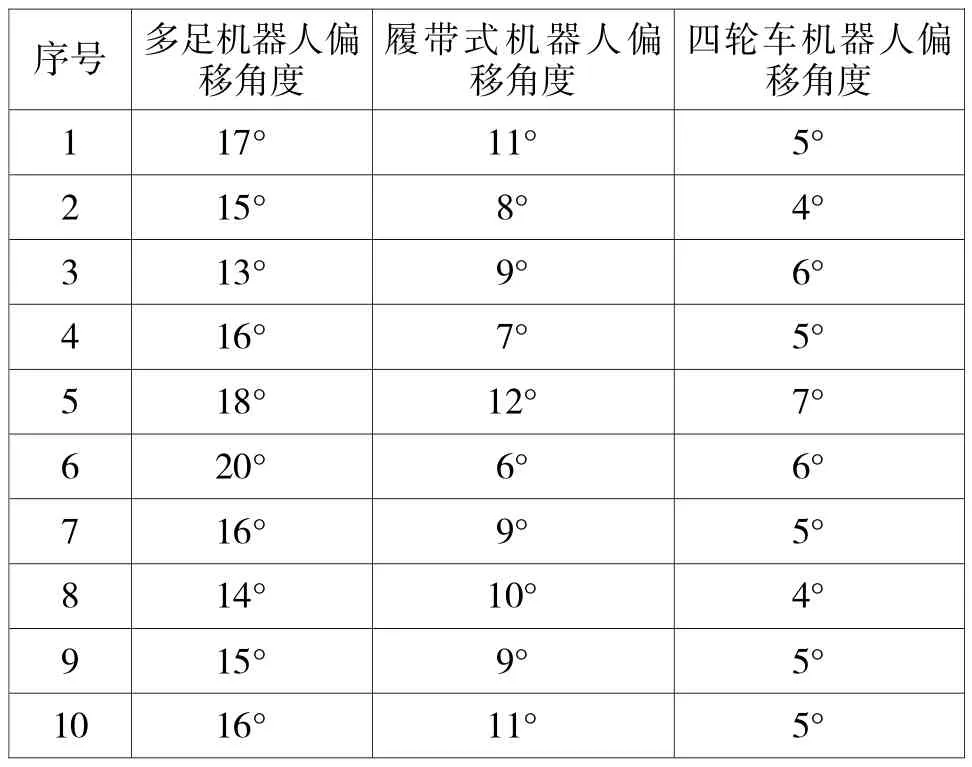
表1 三种机器人偏移角度实验数据
从实验数据分析得知,多足机器人运行时角度偏移最大,履带式机器人运行时偏移角度较大,四轮车机器人运行角度偏移量最小,符合电力信息通信机房敷设轨道上机器人的运行要求。
(2)轨道敷设方案
为机器人敷设特定的巡检路线,并使其在预设轨道上平稳运行,采用红外探测法来寻找机器人的运行轨迹——“黑线”。即红外线在不同颜色的物理表面具有不同的反射性质的特点,在机器人行驶过程中不断地向地面发射红外光,当红外光遇到地面时发生漫发射,反射光被装在机器人上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。因此,轨道敷设材料均采用黑色的材质。在轨道材质选择上考虑黑色瓷砖、黑色涂料、黑色胶带。
实验方法:采用多组对比实验,在实验室分别用黑色瓷砖、黑色涂料、黑色胶带敷设了4m×4m、4m×5m、5m×5m的三个实验轨道。
考察指标:统计机器人单圈运行所需时间、是否发生停止不前现象、识别异常障碍物的速度以及敷设轨道所需总价。实验结果见表2。
从实验数据分析得知,机器人巡检时间随着轨道的长度增长而增加,选用敷设黑色胶带的成本最低,效果最好。
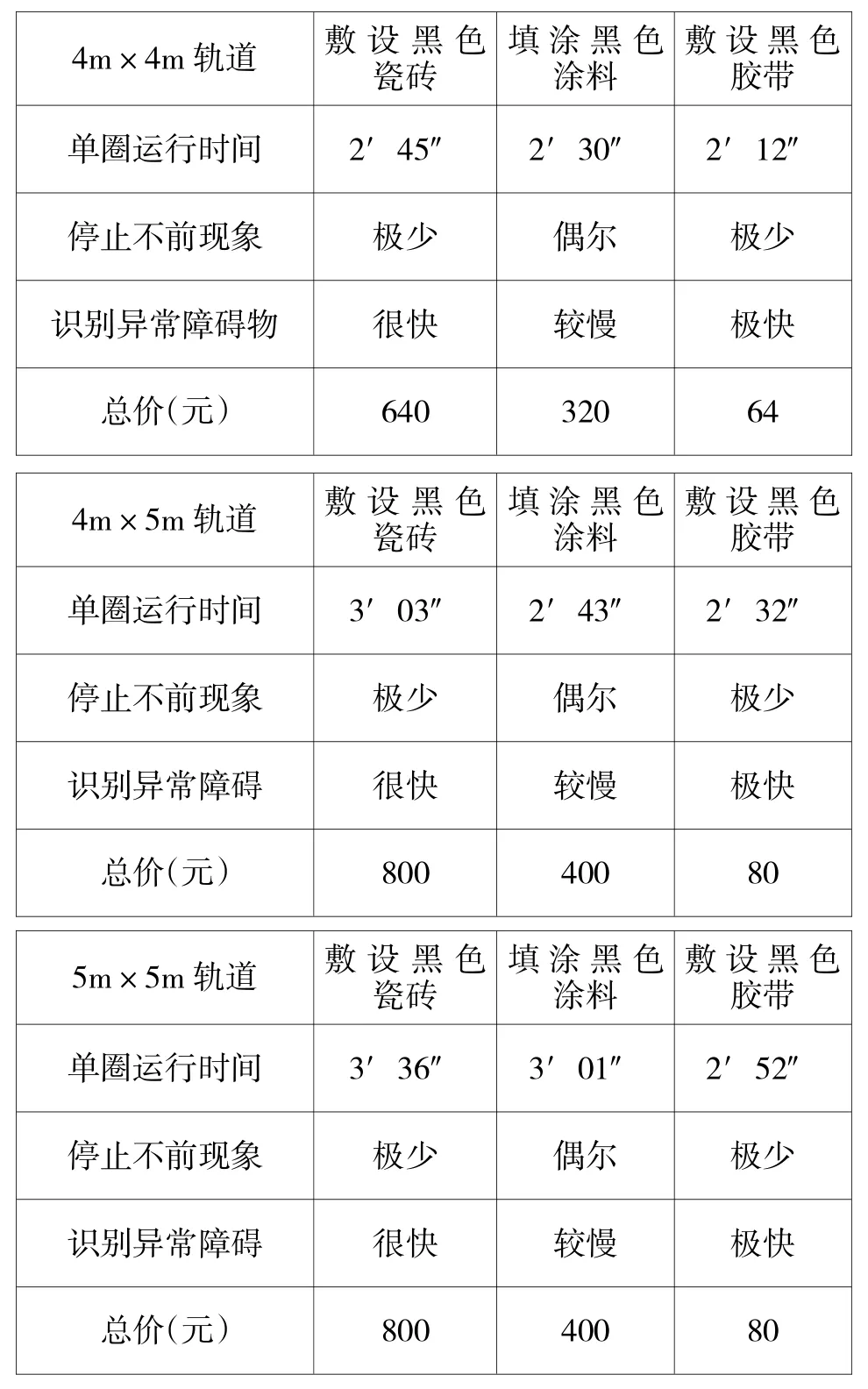
表2 三种轨道敷设方案对比
(3)功能单元方案
(a)温湿度监测方案
对温湿度监测传感器的选择主要在于它的温湿度监测精度和响应时间。对两种传感器进行温湿度的监测试验,在特定的电力信息通信机房(网络机房),先后选用DTH11传感器和AM2302传感器进行温湿度监测对比试验。实验结果如表3所示。
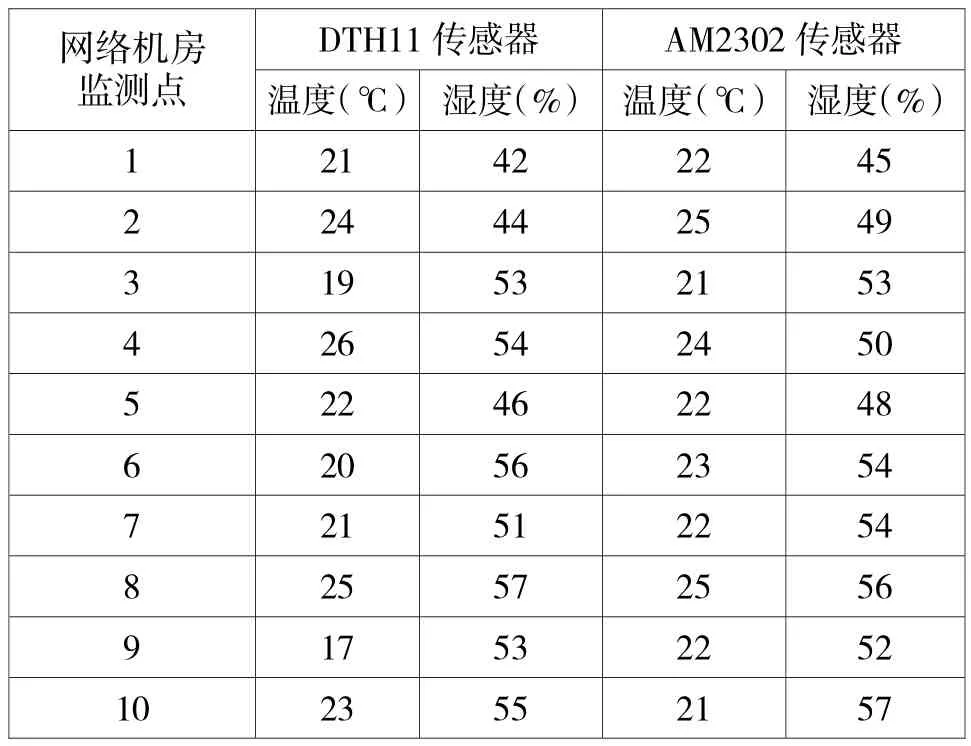
表3 两种传感器监测数据
从实验结果可以看出,DTH11传感器温湿度监测精度较差,AM2302传感器温湿度监测效果良好,适用于智能巡检机器人。
(b)视频采集传输方案
当巡检机器人移动时需要对视频、声音等信息进行实时传输,通过在规定的时间和区域范围内,考察高清采集有线传输与高清采集无线传输两种方式视频采集范围与传输能力。结果如表4所示。
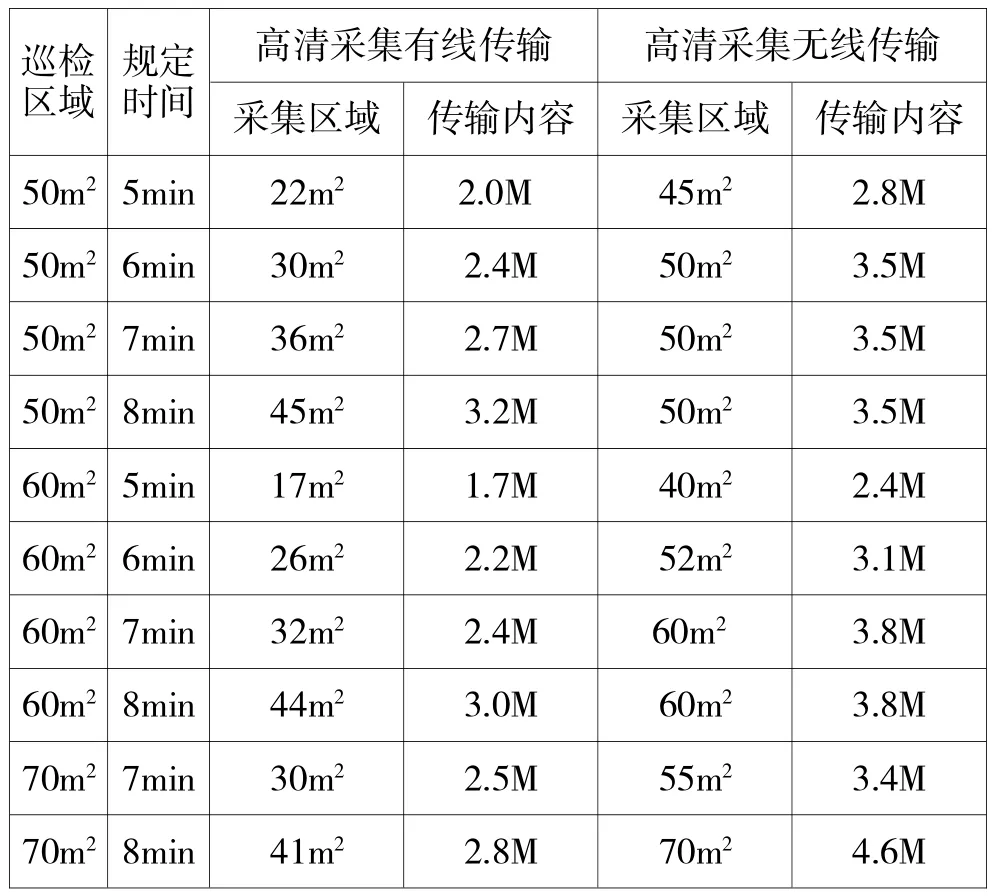
表4 两种方式采集传输能力对比
从表中可以看出,高清采集有线传输因受巡检移动时传输线的影响采集区域较小、传输能力较弱,而高清采集WIFI传输移动灵活,在规定时间内,采集区域较大、传输能力强。
(4)辅助单元方案
(a)循迹避障方案
机器人在预设轨道上做巡检任务时,须对途中障碍物进行躲避以保障巡检顺利进行,文中对电磁循迹和红外循迹两种方式进行实验分析,具体通过统计机器人单圈运行过程中能够规避的障碍物个数(总数10个)及时间测试两种方式的避障能力进行优选。
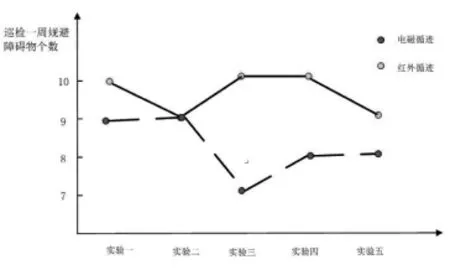
图3 两种循迹方式避障能力对比
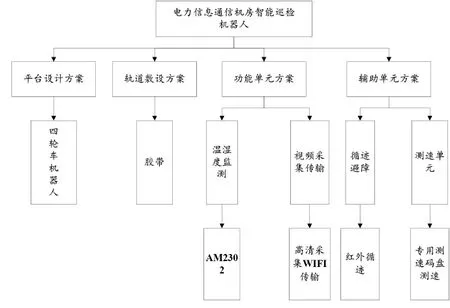
图4 最佳方案框图
实验结果如图3所示,可见,使用红外循迹法能够有效地规避障碍物。
(b)测速单元方案
测速单元能够根据巡检需要进行匀速移动、变速移动、特殊区域定位精细巡检,保证机器人不会因速度变化而发生翻车、严重抖动等情况,对红外测速和专用测速码盘两种方式进行比较分析,实验结果见表5。
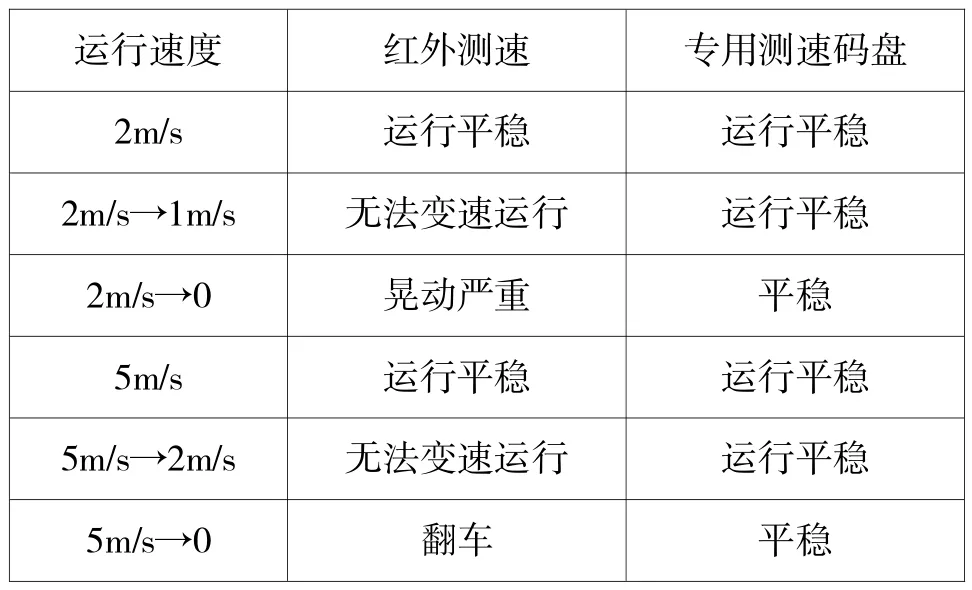
表5 两种测速方案对比
从实验结果可以看出,红外测速无法实现变速运行,当执行定位操作时,即将速度变为0时,机器人有翻车情况出现;专用测速码盘能够实现变速运行,当执行定位操作时,即将速度变为0时,机器人平稳,适用于机房智能巡检机器人。
根据对四个模块的设计和实验,选出最佳方案,如图4所示。
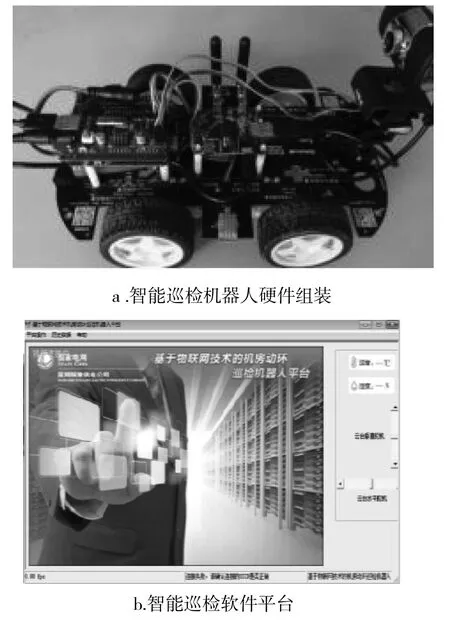
图5 智能巡检机器人现场应用图片
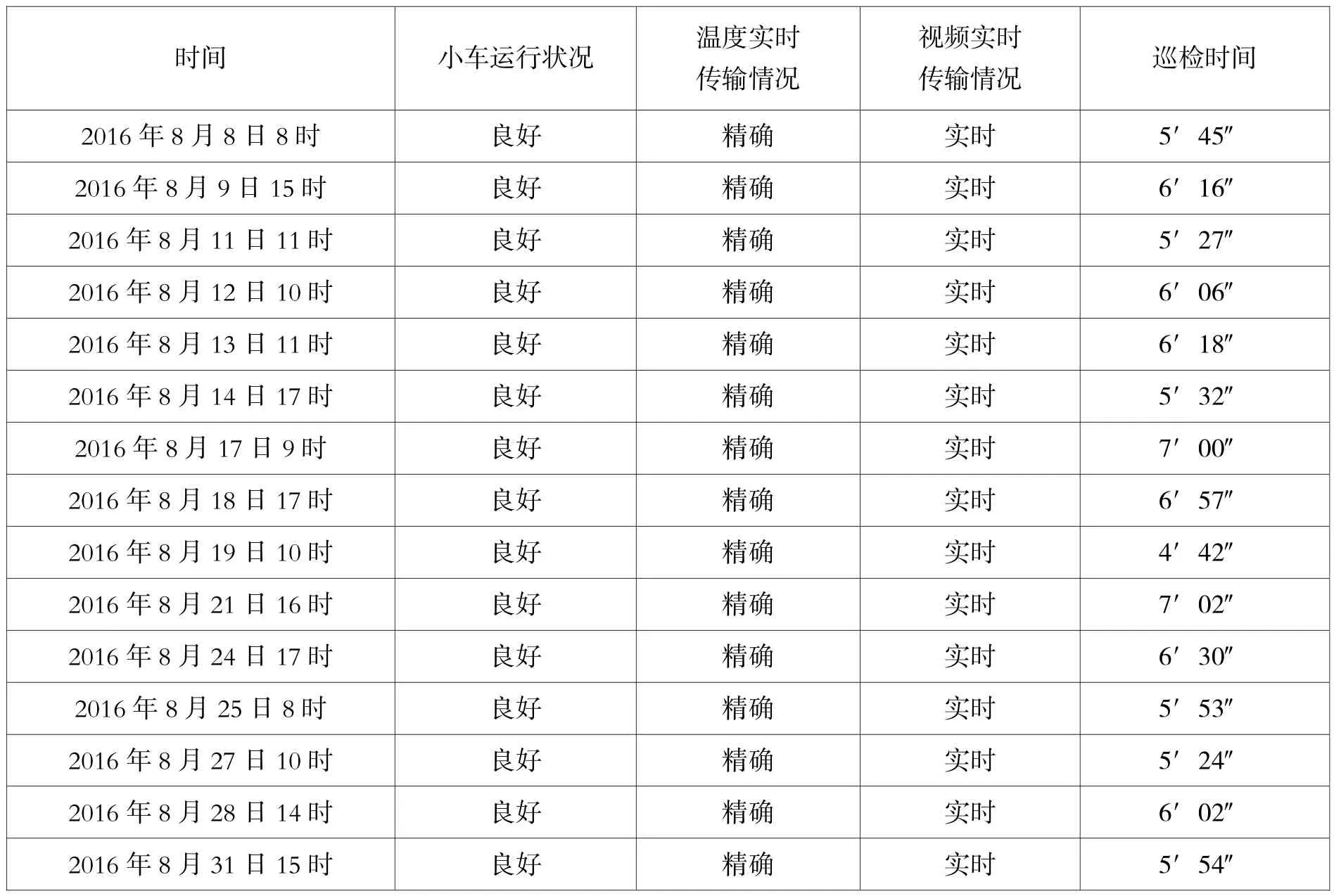
表6 现场验证对比结果
4 现场示范应用
对智能巡检机器人的各单元模块进行硬件组装,并对开发的智能巡检软件进行调试,最后进行现场验证。
为实现现场验证,从铜陵供电公司在运的信息通信机房中随机选取3个机房进行了为期15天的跟踪测试,运行结果如表6所示。
经过检查,机房智能巡检机器人巡检温湿度精度高,巡检时间在7′02″以内,大大提升了人工巡检的效率和精度。
5 结束语
针对目前电力系统通信机房人工巡检耗时费力、存在巡视盲区、无法实时监测的问题,设计了一种电力信息通信智能巡检机器人,以机器人巡视代替传统人工巡检,实现了对机房环境的实时精确监测,并且大大降低了巡检时间。随着电网规模逐年扩大,信息化程度的逐步加深,精细化管理要求的不断提高,相信智能巡检机器人将具有更好的应用前景。
[1]李向东,鲁守银,王宏等.一种智能巡检机器人的体系结构分析与设计[J].机器人,2005,27(6):502-506.Li Xiangdong,Lu Shouyin,Wang Hong.Design and Analysis on the Architecture of an Intelligent Iterative Inspection Robot[J].Robit,2005,27(6):502-506.
[2]陈凌峰,初艳华.智能巡检机器人测温应用及案例[J].电子测试,2016,(23):29,25.Chen Lingfeng,Chu Yanhua.Application and Case of Temperature Measuring Using Intelligent Patrol Robot[J].Electronic Test,2016,(23):29,25.
[3]Sawada J,Kusumoto K,Munakata T.A mobile robot for inspection of power transmissions lines[J].IEEE Transactions on Power Delivery,1991,6(1):309-315.
[4]Pouliot N,Montambault S.Field-oriented developments for LineScout Technology and its deployment on large water crossing transmission lines[J].Journal of Field Robotics,2012,29(1):25-46.
[5]肖鹏,栾贻青,郭锐等.变电站智能巡检机器人激光导航系统研究[J].自动化与仪表,2012,27(5):5-9.Xiao Peng,Luan Yiqing,Guo Rui.Research of the Laser Navigation System for the Intelligent Patrol Robot[J].Automation and Instrumentation,2012,27(5):5-9.
[6]高旻龙.智能巡检机器人在变电站中的应用[J].价值工程,2015,(11):254-255.Gao Minlong.Application of Intelligent Inspection Robot in Substation[J].Value Engineering,2015,(11):254-255.
[7]H.Kobayashi,H.Nakamura,and T.Shimada.An Inspection Robot for Feeder Cables Basic Structure and Control[C].Iecon 1991.992-995.
[8]周盼,张蕾.基于Android平台的变电站智能巡检系统[J].计算机测量与控制,2015,23(9):3073-3076.Zhou Pan,Zhang Lei.An Android Platform Based Information Acquisition System for Transformer Stations[J].Computer Measurement and Control,2015,23(9):3073-3076.
Design and Application of an Intelligent Inspection Robot for Information and Communication Room
Yang Lianying,Yang Ya,Wang Wenjie,Chen Xiuguo
(State Grid Tongling Electric Power Supply Company,Tongling 244000,China)
At present,electric power information communication presents new characteristics such as open,ubiquitous,smart,interactive and credible,which fully support the interaction between smart grid energy and information.With continuous progress of the power supply quality service construction and village distribution network upgrading and reconstruction,state grid corporation puts forward higher requirement to the electric power information communication computer room management,such as integration,real-time and security.Traditional way of manual inspection has been unable to meet the demand of electric power information security of communication computer room.In order to overcome the problem of manual inspection for information and communication room,such as time-consuming,laborious,weak real-time,and it exists many blind spots of supervision,compares the experiment programs of robot platform,track laying,fuctional units and auxiliary units,designs an Intelligent Iterative Inspection Robot,site verification proves that the intelligent inspection can replace manual inspection,it has a significantly economic and social benefits,also with promotional value.
Information and communication room;Intelligent inspection robot;Manual inspection
10.3969/j.issn.1002-2279.2017.05.023
TP391
A
1002-2279-(2017)05-0089-06
杨连营(1966-),男,安徽六安人,高级工程师,主研方向:智能信息处理理论与技术。
猜你喜欢
装备制造技术(2021年5期)2021-08-14 01:45:00
漳州职业技术学院学报(2019年1期)2019-11-16 08:46:00
铁道通信信号(2018年11期)2019-01-19 01:15:00
电子制作(2018年11期)2018-08-04 03:26:02
通信电源技术(2018年3期)2018-06-26 06:33:38
西安工程大学学报(2016年6期)2017-01-15 14:08:35
现代工业经济和信息化(2016年12期)2016-05-17 05:37:46
通信电源技术(2016年6期)2016-04-20 06:21:39
通信电源技术(2016年4期)2016-04-04 02:58:00
西部广播电视(2015年10期)2016-01-18 03:46:17