
基于永磁同步电机的双模矢量控制器设计
2017-11-16 09:22丁学明郑照平
电子科技 2017年11期
谢 乐,丁学明,郑照平
(1.上海理工大学 光电信息与计算机工程学院,上海200093;2.上海雄博精密仪器股份有限公司,上海200444)
基于永磁同步电机的双模矢量控制器设计
谢 乐1,丁学明1,郑照平2
(1.上海理工大学 光电信息与计算机工程学院,上海200093;2.上海雄博精密仪器股份有限公司,上海200444)
在永磁同步电机矢量控制应用中,位置传感器损坏或信号传输异常时,易导致严重事故或给用户带来不便。针对此问题,文中设计了一种有、无位置传感器双模式矢量控制器,通过调节观测器增益K和锁相环PI参数,使得带锁相环的Luenberger观测器能够跟踪实际转子位置,当位置信号异常时,控制器可以自动从有位置传感器模式平滑切换到无位置传感器模式运行。
永磁同步电机;矢量控制;Luenberger观测器;平滑切换
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的励磁由永磁体提供,磁动势、电压和电流均为正弦波形,其具有控制性能好、调速范围宽、运行平稳、效率高等优点[1-2],且与永磁无刷直流电机相比,转矩脉动和铁芯损耗更小,近年来已得到广泛应用。
永磁同步电机的高性能控制一般采用矢量控制算法,这需要精确的转子位置信息。获取转子位置信息的方式有两种:一种是通过位置传感器来获取;另一种方法是通过控制算法来估算出转子位置和转速,比如磁链观测器法[3]、扩展卡尔曼滤波法[4]等。目前,永磁同步电机的位置检测以霍尔传感器为主,采用机械式位置传感器获取转子位置可靠性最高,其在全速度范围内都能获得高精确度的位置与速度信号[5-6]。但在实际应用中,内置式位置传感器往往容易发生损坏,市场调查得知电动自行车用电机产生的故障80%源自霍尔元件的故障[7-8]。在某些情况下,位置传感器一旦发生损坏,极易造成严重的安全事故或给用户带来不便。
针对上述问题,文中设计了一种双模式矢量控制器,使得电机在有霍尔传感器运行过程中,能够通过Luenberger观测器和锁相环相结合的方法,估算出转子位置和转速,并能够实现对转子实际位置和转速的跟踪,以使当霍尔传感器故障时,能够迅速且平滑的切换到无位置传感器控制模式,使得电机继续保持正常运行,大幅增强了电机运转时的安全性和可靠性。
1 转子位置信息获取
1.1 有霍尔传感器位置信息的获取
对于永磁同步电机,电机转动时3个霍尔元件会产生三相霍尔信号[9]。 如图1所示,随着三相霍尔的每一次输出状态改变,电角度也随之改变。在实际应用中,需要定义零度角位置,比如定义A相上升沿为零度角位置,则三相霍尔异或后的状态改变顺序为5-4-6-2-3-1,状态改变一次则电角度改变60°。
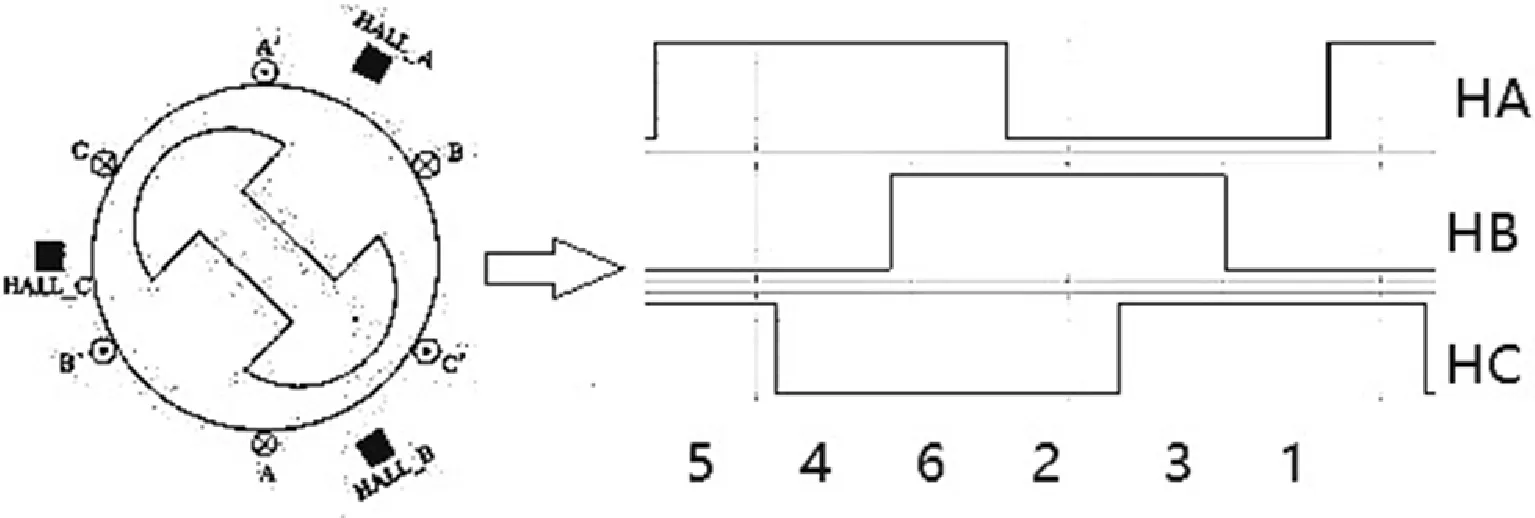
图1 永磁同步电机三相霍尔信号
1.2 无位置传感器时位置信息的获取
相对于通过位置传感器获取角度信息,无位置传感器控制算法则较为复杂。在本文中主要讨论了Luenberger观测器算法对于位置信息的估算。通过状态重构,设计一个带输出反馈的闭环观测器系统,实现对于所需状态变量的观测[10-11]。
两相静止坐标系下的PMSM数学模型为
(1)
式中,iα,iβ,vα,vβ,eα,eβ为两相静止坐标系下的电流、电压和反电势;ωr为转子电角速度;p为电机极对数;Ls为α、β轴电感;Rs为电枢电阻。其中状态矢量为x=[iα,iβ,eα,eβ],输入矢量为u=[vα,vβ],输出矢量为y=[iα,iβ]。
基于上述状态方程,可以设计出针对永磁同步电机转子位置估计的Luenberger观测器,结构模型如图2所示。

图2 闭环观测器结构框图
永磁同步电机状态观测器数学模型下
(2)
可表示为
(3)
由现代控制理论可知,状态反馈会影响系统的稳定性,要使反馈构成的闭环系统渐进稳定,需要确定观测器增益矩阵K,使A-KC为稳定矩阵[10],即需使(A-KC)的特征值均具有负实部。系统特征矩阵为

(4)
特征值根为

(5)
(6)

上述观测器方案实际是利用已知量vα,vβ,iα,iβ估算出反电动势eα,eβ,反电势中含有角度信息,但是由于观测器观测到的反电势耦合有很多干扰信号,为了获取精确的角度信息,所以采用锁相环(Phase-locked Loop,PLL)的方法来提取转子的位置信息[12-13],锁相环结构框图如图3所示。
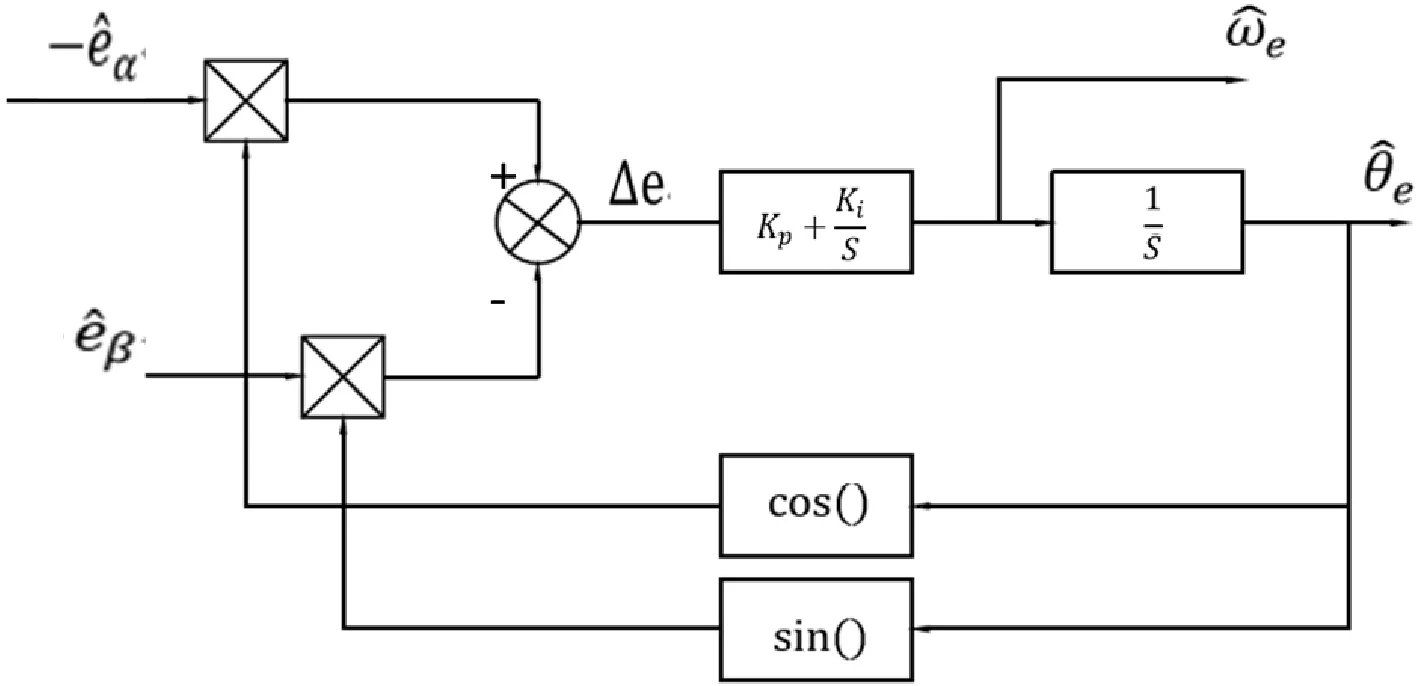
图3 锁相环结构框图
其中通过PI控制器调节速度输出值来使得输入值保持为0,即相当于估计的角度不停的跟踪实际的角度。
2 双模矢量控制系统软件设计
由霍尔传感器的原理可知,当电机转子(永磁体)磁极转过霍尔传感器附近时,会发出一个高电平或低电平信号[14]。上文已经说明,当三相霍尔信号正常时,随着电机的转动,三相霍尔信号会按照固定的顺序(011-010-110-100-101-001)变化,从而获取当前的实时位置信息。所以,若是(1)三相霍尔信号中出现111或000时;(2)霍尔组合信号不是按照上述顺序变化时,则表明至少有一相霍尔损坏或信号传输电路故障。
电机启动时,首先会检测当前三相霍尔信号,如果发现异常,则电机关停,并以无位置传感器模式启动。
电机在有位置传感器模式运行时,会不断的检测三相霍尔信号,并据此计算当前角度值,与此同时,观测器和锁相环也会同步工作,依据当前的iα,iβ,vα,vβ值,得出估算的角度信息和速度值,通过调整观测器增益K和锁相环PI参数,使得估算值能够很好的跟踪实际值。若在电机运转过程中,检测到三相霍尔信号发生异常,由于电机控制器软件运行时间通常都为微秒级,当霍尔信号出现异常后,可以保证电机在失控前即平滑的切换为无传感器运行模式,如图4所示。
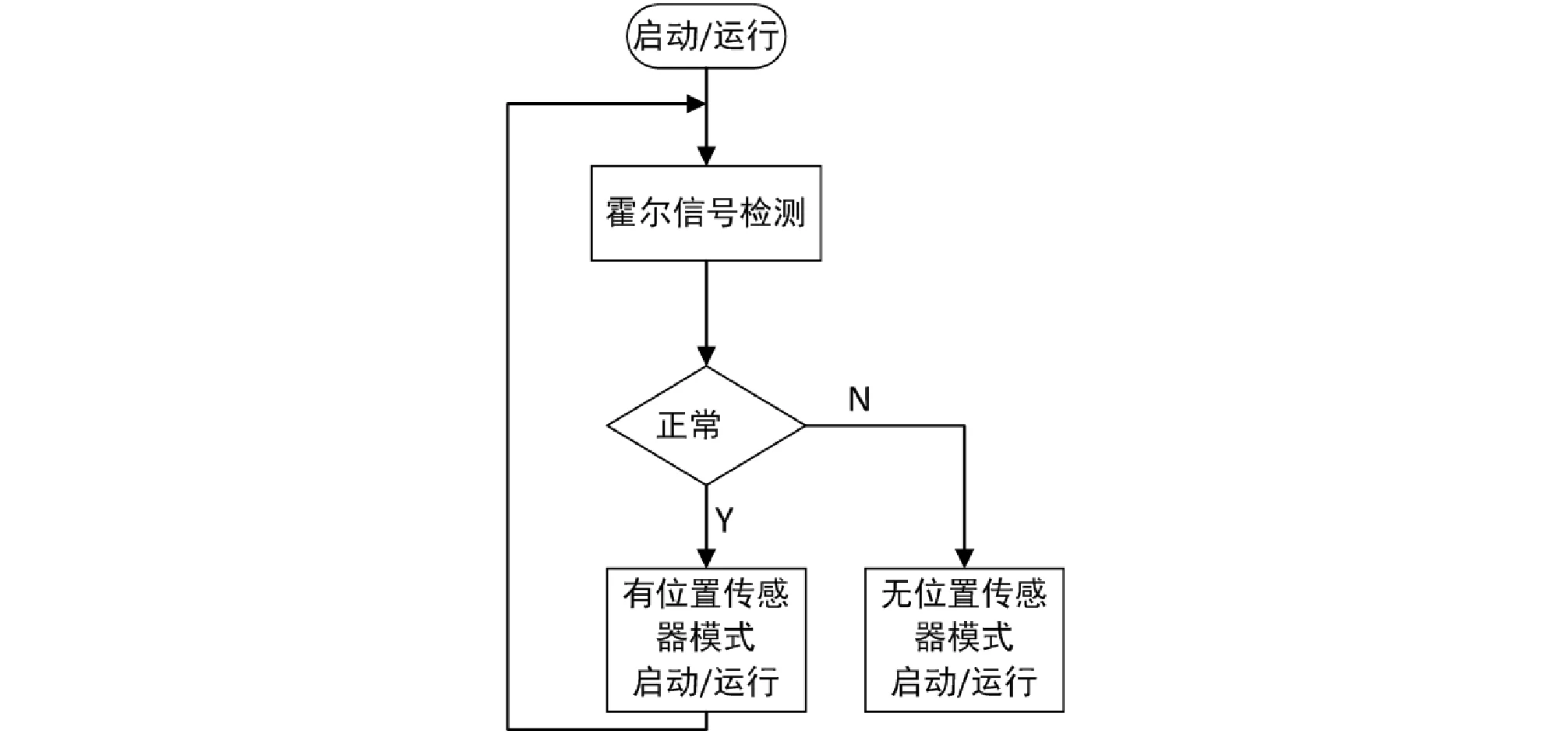
图4 工作模式切换框图
3 仿真分析及验证
为验证Luenberger观测器能够有效运行,基于Matlab建立仿真模型进行验证,使用电机参数为:定子电阻Rs=1.6 Ω,定子电感Ls=1.4 mH,额定电压为U=24 V,电机极对数p=4。观测器增益k1=38 855,k2=-559 950,锁相环PI参数为10和0.003。
图5为电机实际速度和估计速度波形,在电机启动和负载突变阶段响应时间约为0.1 s。

图5 实际速度和估计速度响应
图6为在运行过程中电机实际速度与估计速度的差值。
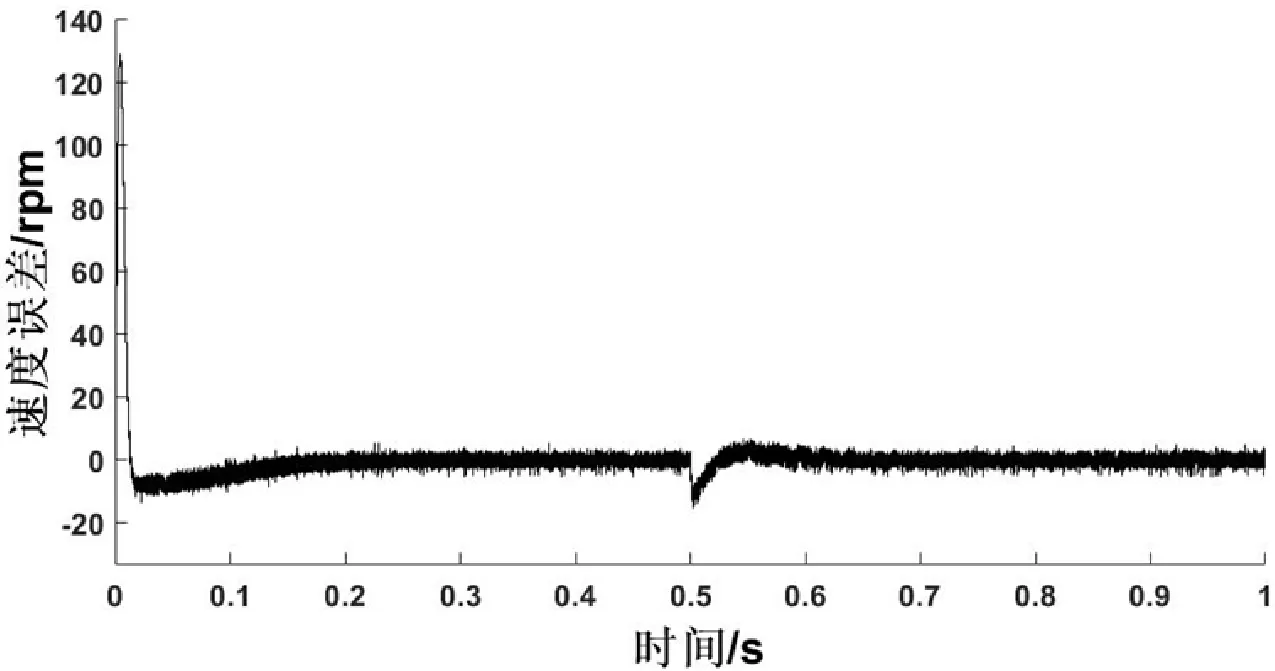
图6 实际速度与估计速度误差曲线
由图6和图7可知,在电机启动时差值较大,由于观测器是从电机电流和电压信号中提取出角度和速度信息,所以较实际速度有一定延迟。且观测器系统在极短的时间内使得二者差值减小到5 rpm以内,表明系统具有良好的动态跟踪特性和鲁棒性。
图7为通过三相霍尔信号得到的实际转子角度和通过观测器得出的估计角度,由波形可知,二者角度值在运行过程中是一致的,表明观测器和锁相环结合的方法得出的估计角度值是准确的。

图7 实际角度和估计角度波形
为进一步验证所设计双模矢量控制器切换过程的有效性,以32位ARM处理器stm32f103[15]为主控制器,进行实验。电机以有霍尔位置传感器模式启动并设定转速为1 000 rpm,正常运行后,通过人为切断一相霍尔信号来模拟霍尔元件的损坏,测试控制器是否能平滑的切换到无传感器控制模式。由图8电机转速波形可知,电机在正常运行时,观测器的转速估计响应是比较好的。在t=5 s时切断一相霍尔信号,由于控制器对于霍尔信号的检测是微秒级的,一旦检测到霍尔信号的异常,立即软件切换为无位置传感器模式,电机的转动波形有较小波动,但能够迅速重新恢复稳定。

图8 有、无位置传感器模式切换时速度波形
4 结束语
本文针对PMSM研究了有、无位置传感器双模矢量控制器的应用。分析了无位置传感器模式下Luenberger观测器对角度和速度的估算,并通过仿真和测试加以验证,使得估计值能够跟踪实际值,解决了单一位置传感器模式时存在的不足之处,具有更好的可靠性和安全性。
[1] 张虎,孙安博,樊生文.浅谈PMSM无速度传感器速度估算[J].制造业自动化,2015,37(6):21-26.
[2] 刘青阳,魏国亮,王永雄.基于模糊理论的永磁同步电机直接转矩弱磁控制[J].电子科技,2015,28(6):187-191.
[3] Shen J X,Zhu Z Q,Howe D. Improved speed estimation in sensorless PM brushless AC drives[J].IEEE Transactions on Industry Application,2002,38(4):1072-1080.
[4] 刘刚,肖烨然,宋欣达.永磁同步电机用线性霍尔位置检测的误差补偿[J].电机与控制学报,2014,18(8):36-42.
[5] 陈铁铮,颜钢锋.基于有无位置传感器的无刷直流电机双模控制器设计[J].电机与控制应用,2011,38(2):32-36.
[6] 朱军,田淼,刘慧君.基于DSP的永磁同步电机全速范围转子定位[J].电子科技,2015,28(7):63-66.
[7] Freescale Semiconductor. 3-Phase BLDC motor control with sensorless back EMF zero crossing detection using DSP56F80X[M].Texas,United States:Freescale Semiconductor,2001.
[8] 潘言全.矢量控制的发展与研究现状[J].黑龙江科技信息,2009(36):106-107.
[9] 谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[10] 李立毅,谭广军,刘家曦,等.基于Luenberger观测器的高速PMSM无传感器技术研究[J].微特电机,2013,41(4):31-34.
[11] Sbita L,Ben H M. An MARS-based full order luenberger observer for sensorless[J].ICGST-ACSE Journal,2007,7(1):11-20.
[10] 郭宇骞,陈明,陈宁,等. BLDCM无速度传感器矢量控制速度估计方法[J]. 控制工程,2013,20(2):348-351.
[11] Ahmed Lagrioui. Speed and current control for me the PMSM using a luenberger oberserver[C]. Morocco: International Conference on Multimedia Computing and Systems,2011.
[12] Rolando P,Shirsagar P,Lidozzi A.Design and evaluation of a pll-based position controller for sensorless vector control of permanent magnet synchronous machines[C]. Paris:32nd Annual Conference on IEEE Industrial Electronics,IEEE,2006.
[13] 李冉,龙雪涛,陈辉.基于锁相环的永磁同步电机无传感器控制[J].电气传动,2013,43(8):8-12.
[14] 李家庆,李芳,叶文.无刷直流电机控制应用基于STM8S系列单片机[M].北京:北京航空航天大学出版社,2014.
[15] STMicroelectronics.STM32F103Xb characteristics[M].Italy and France:ST Microelectronics,2007.
Design of Dual Mode Vector Controller Based on Permanent Magnet Synchronous Motor
XIE Le1,DING Xueming1,ZHENG Zhaoping3
(1. School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;2. Shanghai Supore Instruments Co.,Ltd.,Shanghai 200444,China)
In the application of PMSM vector control,it is easy to cause serious accidents or inconvenience for the users when the position sensor is damaged or the signal transmission is abnormal. In order to solve this problem,this paper designs a dual mode vector controller either with position sensor or sensorless. By adjusting the gain of the observer-K and PI parameters of PLL,the Luenberger observer with phase-locked loop can track the actual rotor position. When the position signal is abnormal,the controller can switch automatically from the position sensor mode to the sensorless mode.
PMSM; vector control; Luenberger observer; switch smoothly
TM301.2
A
1007-7820(2017)11-103-04
2017- 01- 04
宝山区科技创新专项资金(bkw201408)
谢乐(1991-),男,硕士研究生。研究方向:电机控制。丁学明(1971-),男,副教授。研究方向:嵌入式系统等。
10.16180/j.cnki.issn1007-7820.2017.11.028
猜你喜欢
防爆电机(2020年6期)2020-12-14
电测与仪表(2017年24期)2017-12-19
童话王国·文学大师班(2017年6期)2017-07-10
光学精密工程(2016年3期)2016-11-07
太空探索(2015年6期)2015-07-12
电测与仪表(2015年9期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年8期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
电子设计工程(2014年18期)2014-02-27
