基于慧鱼模型的装箱流水线设计与制作
2017-11-13 03:03:10周叙荣刘天军杨步超胡佳伟
淮阴工学院学报 2017年5期
周叙荣,刘天军,杨步超,胡佳伟,庄 宝,张 健
(1.常州工学院 机械与车辆工程学院,江苏 常州 213032;2.河海大学 机电工程学院,江苏 常州 213022;3.常州工学院 数理化工学院,江苏 常州 213032)
基于慧鱼模型的装箱流水线设计与制作
周叙荣1,2,刘天军3,杨步超1,胡佳伟1,庄 宝1,张 健1
(1.常州工学院 机械与车辆工程学院,江苏 常州 213032;2.河海大学 机电工程学院,江苏 常州 213022;3.常州工学院 数理化工学院,江苏 常州 213032)
针对现有商品包装机械因功能少、使用不便,无法满足日益发展的网店商品包装的需求,提出将商品包装过程从四面连接纸箱板到装入物品完成封装所需机构一体化的设计,在现有商品包装机械的基础上进行改进,设有滚轮出纸机构、移动平台、气动吸盘机构、合盖机构、底面贴胶机构、装充填物机构、装填物品机构、转运机械手等部分,完成商品装箱流水线的整体设计,以达到提高商品包装自动化、多样化,极大改善网店经营等目的。
慧鱼;ROBO Pro软件;装箱;便捷;流水线
0 引言
“慧鱼”创意组合模型(Fischertechnik)是德国公司研制的技术含量很高极富创新性的拼装模型。“慧鱼”有诸多构件相应组合而成,如机械构件、传感器、电气构件、气动构件、电脑控制器(如ROBO TX控制器)和慧鱼编程所需要的相关软件, 利用这些构件就可以实现多样组合变化,提升实验的趣味性,提高学习兴趣以及创新思维[1-5]。
近几年来,我国快递行业发展迅速,极大地促进了包装行业的发展。现在包装行业虽然投入了大量的人力物力,但是劳动力缺口依然很大,且效率过低。现在企业不断追求生产高效化,而大型企业、国有企业较少,民营企业多而散,行业整体规模偏小,同时面临着许多外资品牌的市场侵入。因此,国有包装企业要实现高速的包装,就必须对传统的包装机械进行改进。
1 主要功能及基本工作原理
基于目前网店商品包装不方便的现状,通过查阅相关资料并且结合实际情况对目前市场上的一些自动包装机构进行一系列改进,用慧鱼创意组合模型搭建了“商品装箱流水线”,实现从纸板→纸箱成形→充填物装填→商品装填这一系列商品包装过程,如图1所示,给网店商品包装提供极大的便利。

图1 成型纸箱
商品装箱流水线由滚轮出纸机构、移动平台、气动吸盘机构、合盖机构、底面贴胶机构、装充填物机构、装填物品机构、转运机械手等部分组成,如图2所示。商品装箱以流水线的形式完成纸箱成形、填充、装货等一系列步骤。可以用于包装多种材质、尺寸和形状商品。该装置综合运用机械原理、机械设计、传感器技术、机电控制技术等学科知识,采用齿轮齿条传动、蜗轮与蜗杆传动、连杆传动、带轮传动、气压传动、凸轮传动、链条传送等方式,以节省人力、节能环保为出发点,实现对不同形状、不同尺寸的商品进行分类包装、计数的目的,提高了包装流水线的自动化程度。
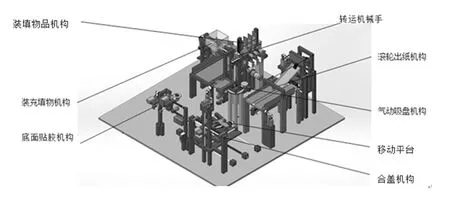
图2 商品装箱流水线
1.1滚轮出纸机构
滚轮出纸机构主要由多个齿轮及传送带搭配相应高度的柱体所构成。滚轮出纸机构共两层,可存放不同规格的纸板,如图3所示。利用两滚轮的滚动摩擦力带动纸板从仓库到达传送带,纸板一个个叠压在仓库中,最前端有一块挡板,只允许最下面的纸板通过,每通过一个纸板,叠压在上面的纸板便会取代前一个纸板的位置,依次循环,滚轮出纸机构工作原理如图4所示。

图3 滚轮出纸机构
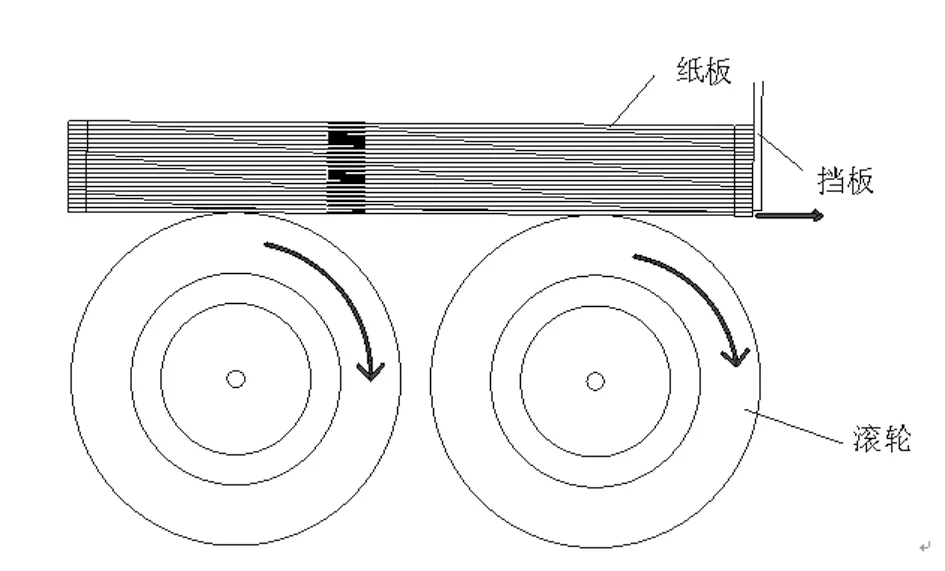
图4 滚轮出纸机构工作原理图
1.2移动平台
移动平台的运动示意图如图5所示,主要由一个旋转平台、一个纵向导轨及电机、一个横向导轨及电机和一个升降平台组成。主要负责连接各个模块,运送到不同的模块对箱子进行加工。该平台可以实现前后、上下、左右六个方向的直线运动以及水平方向的旋转运动。
(1)由电机EM1 M1带动横向丝杆,使工作台实现前后直线运动,向后接住从传送带上过来的纸板,向前与四锥齿机构实现箱子侧面合盖;
(2)由电机M4带动纵向丝杆,使工作台实现左右运动,向左与气动吸盘实现纸板的立起动作,与贴胶机构实现侧面贴胶,向右复位;
(3)工作平台还能实现箱体的转动,通过电机EM2 M1的正反转动控制工作台的顺逆时针的旋转;
(4)由EM1 M3 带动丝杠正反旋转,使剪式升降台作升降运动,以此调节工作平台高度,来适应不同宽度的纸箱,在此后的底部合盖和底部贴胶的过程中能使纸箱宽度方向的对称平面相对于地面保持一定的高度;
(5)电机EM1 M2为一个箱子成型装置的发动,旋转配合气动吸盘实现纸板从平面到立体的变化。配合电机EM1 M4可以使箱体加紧,以便实现之后的各种对箱子的操作。在加工完箱体一侧时,电机EM1 M2使翻转板落下,使翻转板成为一种下坡,再由电机EM1 M4向前推进,箱体推入下一步骤。

图5 移动平台运动示意图
1.3气动吸盘机构
采用气动吸盘装置防止移动平台电机M3驱动的侧挡板完成纸板立起的动作时会将纸板压弯变形,所以需要竖直方向的一个力辅助纸板立起来,如图6所示。先通过吸盘将纸板吸起来部分,然后再由工作平台完成剩下的立起动作,保证了纸板顺利成形。

图6 气动吸盘机构
吸盘固定在吸盘架上,当整个装置通过升降丝杆下压时,压缩弹簧,利用弹簧反作用力将吸盘压紧在纸板上,然后通过通气螺栓与气管连接将吸盘以及气管内的空气吸去,利用压力差将纸板吸起来。
1.4合盖机构
合盖机构主要由蜗杆、蜗轮和直齿圆锥齿轮组成,如图7所示。通过十字型交叉对称的搭建,来实现四个方向的相对运动,从而巧妙的实现纸箱底面合盖的功能。

图7 合盖机构
该机构由变速电机EM3 M1驱动,通过齿轮将旋转运动传递给蜗杆,蜗杆在带动直齿锥齿轮旋转,四个锥齿轮相互啮合,从而带动蜗杆上的蜗轮做上下移动,实现同轴向的蜗轮做相对运动、相垂直的蜗轮做反向运动,搭接在蜗轮上的挡板将伸出的箱盖合上。该结构能有效地避免箱盖间的相互阻碍。
1.5底面贴胶机构
底面贴胶机构如图8所示,该机构由滚轮(装胶带卷)、拉杆(将胶带拉出)、辅杆(防止胶带被切断后又粘在胶带卷上,便于下一次拉杆将胶带拉出)组成。整体贴胶流程就是先通过拉杆将胶带拉出(因为通过多次测试,纸箱很难将胶带卷拉出),然后将纸箱靠上去粘住。
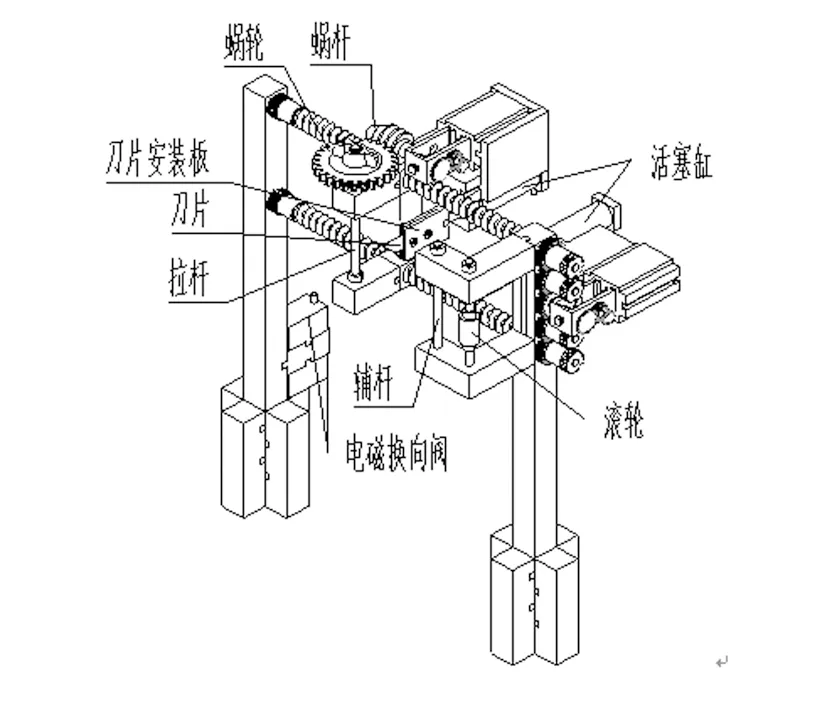
图8 底面贴胶机构
1.6装充填物机构
装充填物机构主要由多个挡板以及两对蜗杆组成。该机构利用叶片轮转动将填充物(泡沫粒)带入纸箱中,用一个发动机驱动,整个机构比较稳定,如图9所示。本模型中使用的是颗粒状泡沫,在实际包装生产过程中,可根据不同的商品选用不同的充填物以实现所需的安全保护。
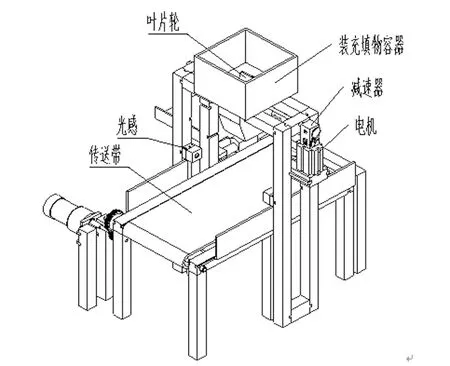
图9 装充填物机构
1.7装填物品机构
装填物品机构主要由升降货架、气缸、活塞杆、气泵、电磁换向阀组成,如图10所示。该机构可提供3种物品类型供选择以体现包装不同商品的主题要求。具体来说就是当选择其中一个时,通过TX控制板控制货架升降,使所需商品所在的那一层停留在活塞杆所在高度,然后与该商品位置对应的气缸所连接的电磁气阀打开,向该气缸打气,活塞杆向前推动商品,让商品通过滑道进入已装填好填充物的纸箱。
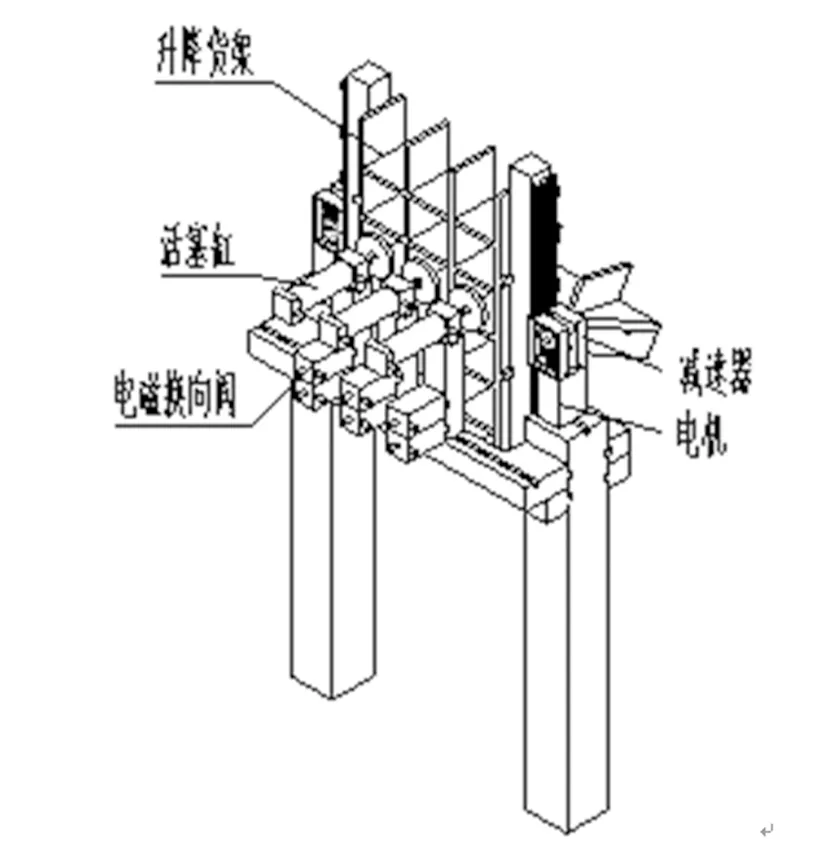
图10 装填物品机构
图11所示为纸箱初始简图、纸箱形状简图,高度为a,长度为b,宽度为c。该机构通过滚轮出纸机构左右的宽度控制纸箱的高度a,通过气动吸盘机构的可升降丝杆控制纸箱的长度b,顶部气锤的齿条升降和宽通过其他各机构来控制,不同的商品选择不同型号的纸箱来包装,可由商家自行设定,邮政纸箱型号及尺寸见表1。
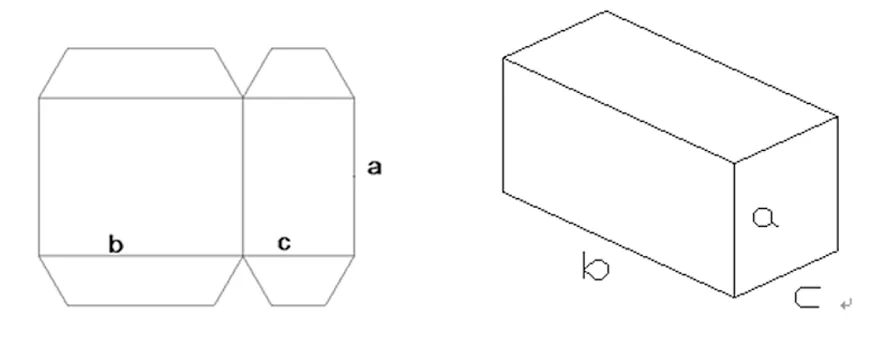
图11 纸箱形状
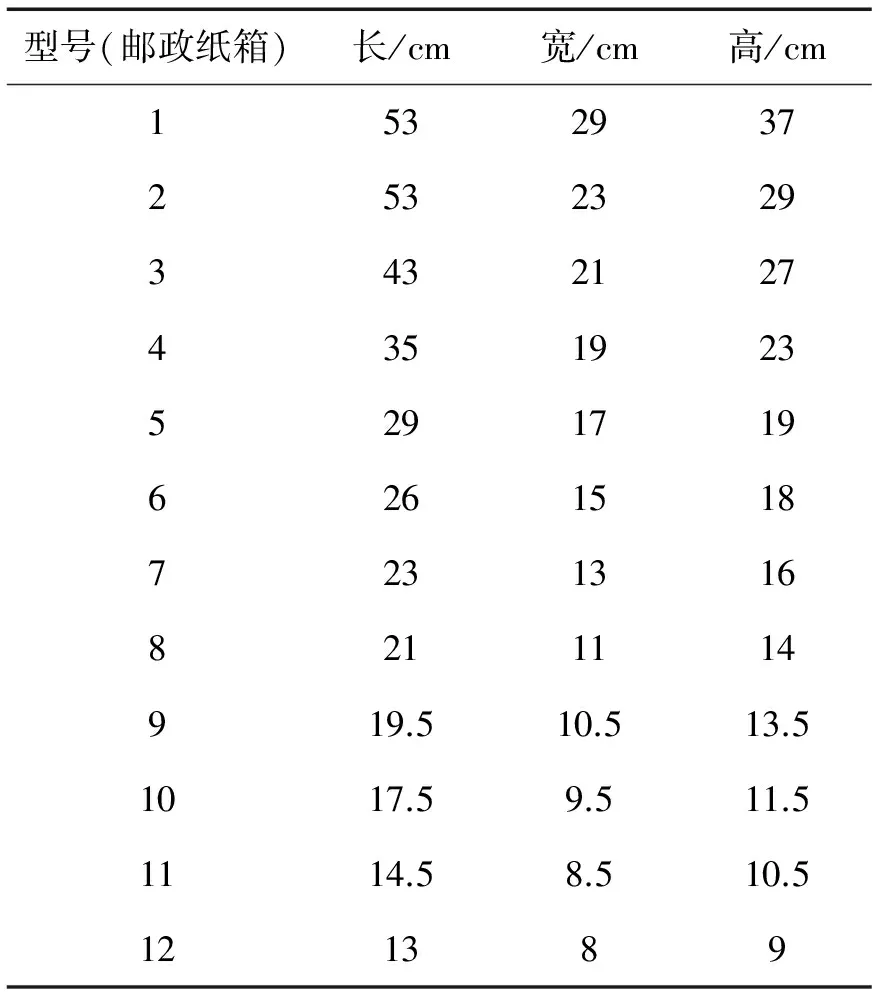
型号(邮政纸箱)长/cm宽/cm高/cm15329372532329343212743519235291719626151872313168211114919.510.513.51017.59.511.51114.58.510.5121389
1.8转运机械手
转运机械手主要由一个机械手和一个蜗轮蜗杆机构组成。在装好商品后,可通过转运机械手,将纸箱搬到顶部封装传送带上,如图12所示。该机械手可180度旋转,机械手通过一根丝杠螺母带动,实现夹紧与松开动作。机械手所在平台通过连杆与丝杠上的丝杠螺母连接可让整个机械手倾斜一定角度,防止挡住传送带上的箱子,充分利用了有限的空间,机械手采用慧鱼零件,中间的卡槽刚好能卡住箱子的边棱,传送平稳。
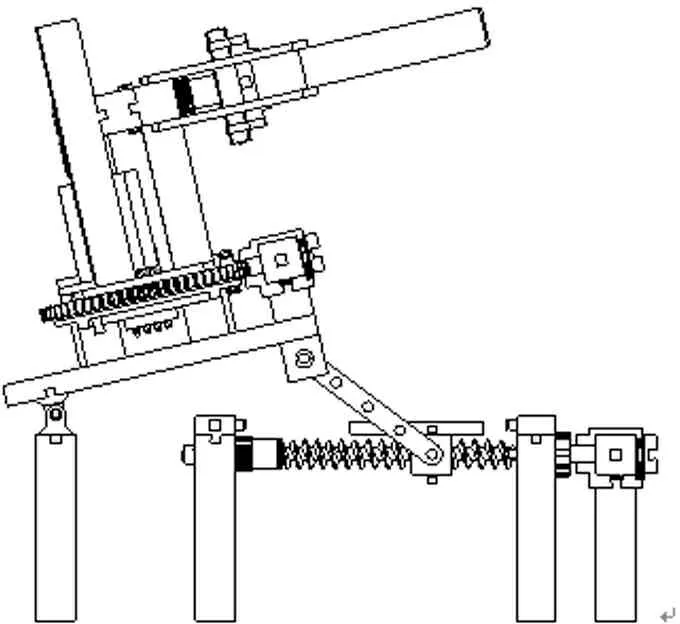
图12转运机械手
2 控制程序
程序控制部分是商品封箱流水线的灵魂。程序用 ROBO Pro软件编制[6],它是一种模块化、图形化编程语言软件,简洁、直观、易懂[7],可对“慧鱼”模型进行精确的动作控制,还可以提供编程前的快速硬件测试、在线检测、在线调试、下载操作等功能。
商品装箱流水线纸箱成形的程序如图13所示。通过第一块主板上光感I4判断是否有纸箱滚出,判断为已滚出时,就向移动工作平台发送命令,使其向纸箱靠近,最终移动到移动平台上。移动平台移动到气动吸盘处,气动吸盘启动,通过电磁换向阀控制气体吸起上部端面,再由移动平台上的翻盖旋转,压紧箱体使之成为站立的状态。
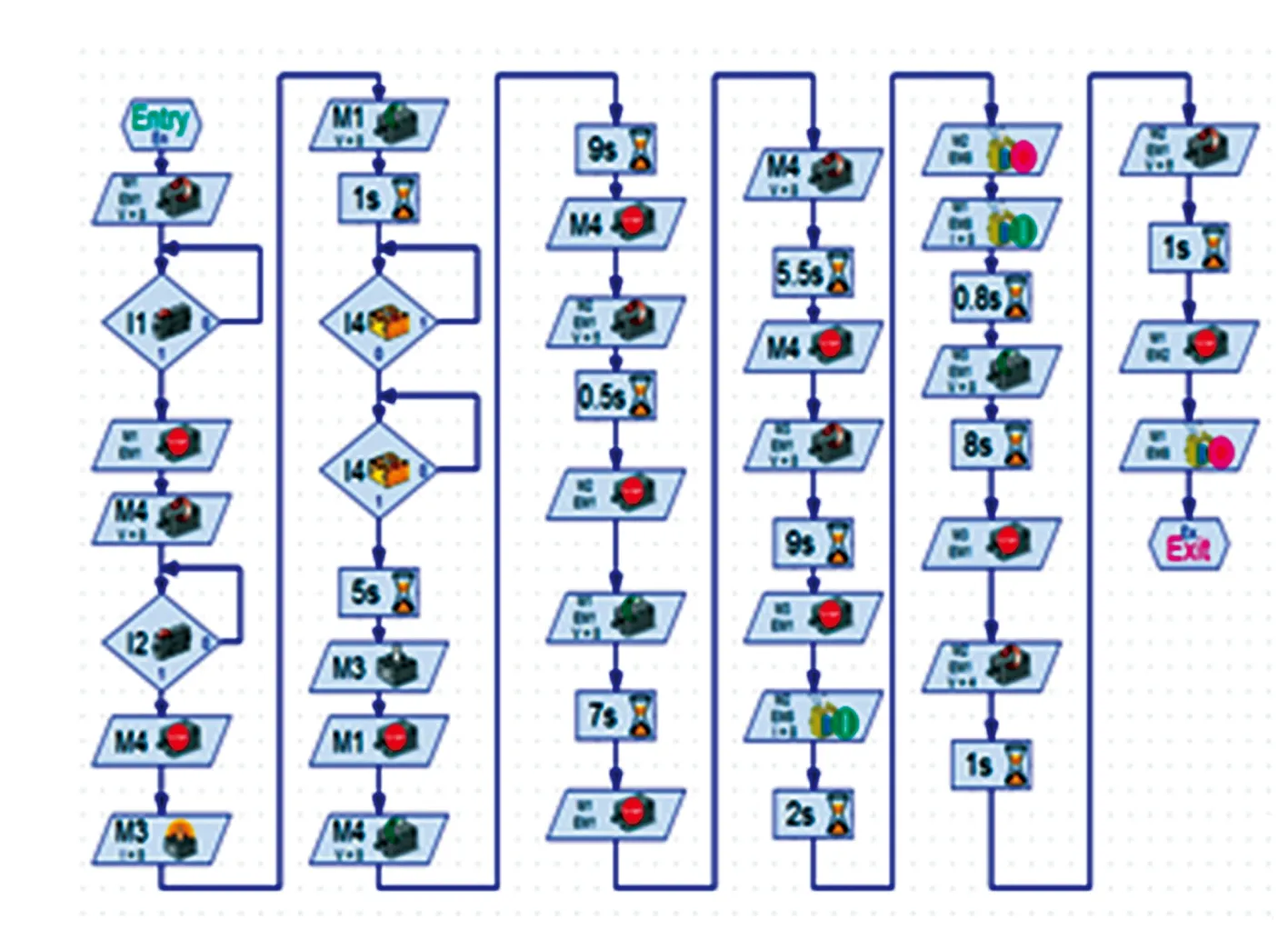
图13 纸箱成形程序图
图14所示为装充填物与装填物品程序图。纸箱从移动平台上由传送带传送到装充填物机构下由设置好的时间控制,到设定的时间时装填充物机构运行,将填充物通过丝杆的筛选进纸箱完成填充。在设定时间后,传送带开始运行将纸箱移到装填物品机构处,机构选取物品,再由启动装置推出,物品随滑道滑入箱体中,完成物品装填。
图15所示为是纸箱合盖程序图。此处采用严格的时间控制,针对不同尺寸的长方体纸箱设有不同的程序。纸箱由移动平台移动到合盖机构处,先由左右丝杆相向进给,通过丝杆上移动的挡板压下箱体上水平方向的两个纸板,然后水平方向退出的同时竖直方向合并,水平方向退出前竖直方向已经压下,以保证合盖成功。竖直方向继续移动完成合盖,移动平台向下一个机构移动。
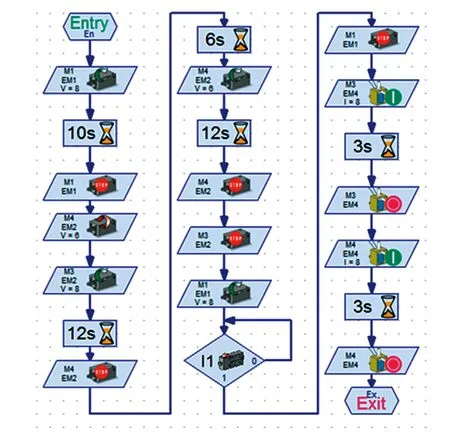
图14 装充填物与装填物品程序图
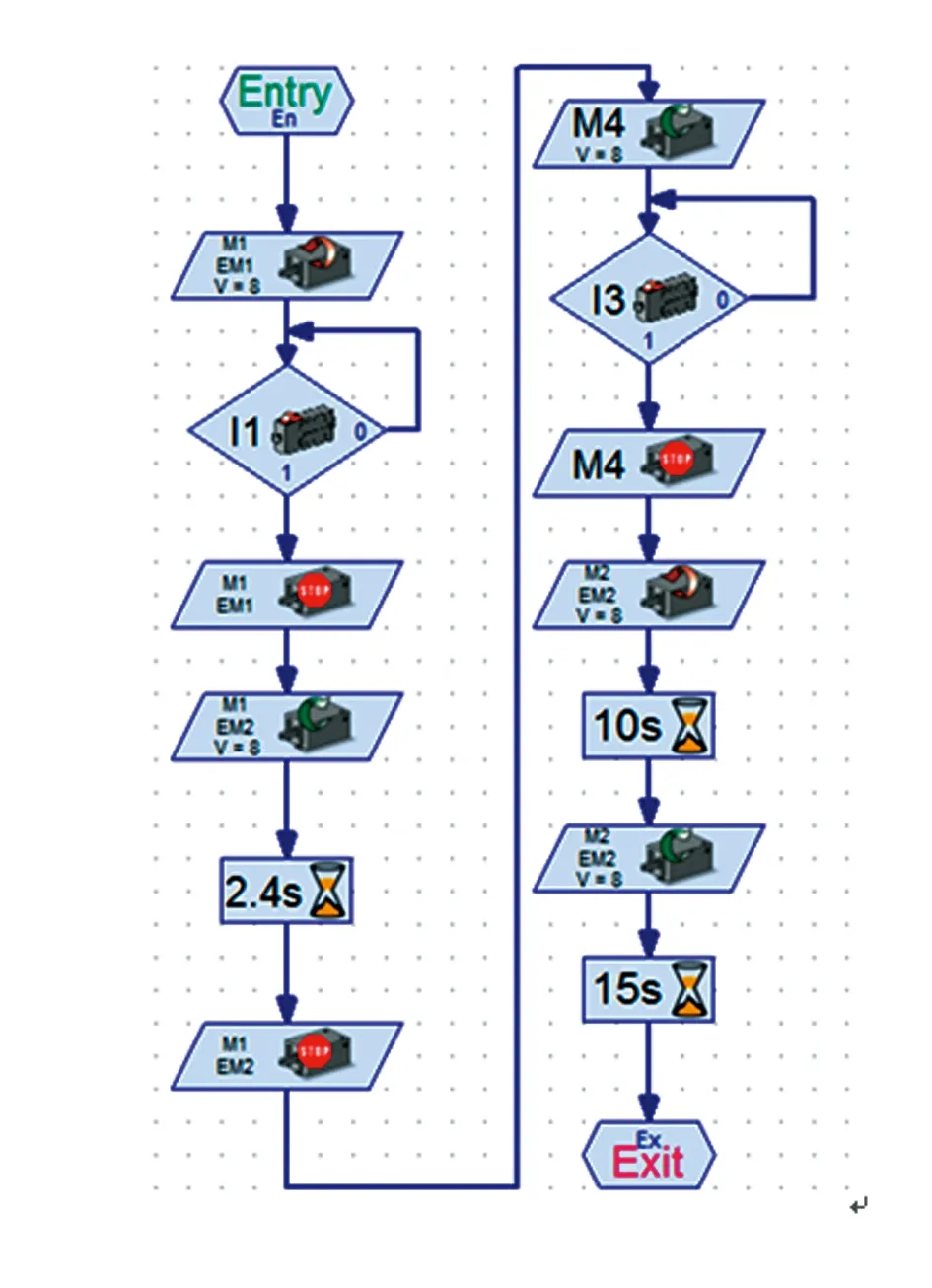
图15 纸箱合盖程序图
图16所示为底面贴胶程序图。移动平台移动到底面贴胶机构处 ,纸箱已经合盖的部分用长挡板挡住。底面贴胶机构拉出胶带,移动平台靠近,使胶带压在合盖面上。再由滚轮压紧,两端的气动装置驱动刀片切断胶带,由刀片后端的特制刀架压紧两侧胶带,完成贴胶工作。
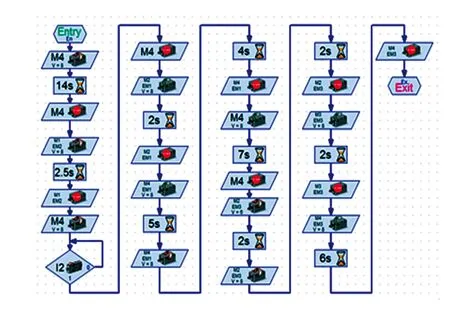
图16 底面贴胶程序图
3 结语
基于“慧鱼”创意组合模型对商品封箱流水线进行完成的仿真设计,研究了商品封箱流水线的机械原理,开发了相关的控制软件。
设计开发的商品封箱流水线具有很好的工程应用前景,对相关机械原理设计和软件开发有参考价值。
[1] 曲凌. 慧鱼创意机器人设计与实践教程法[M].上海:上海交通大学出版社,2007.
[2] 刘天军,毛建秋,支波浩,等.基于“慧鱼”创意组合模型的避障机器人的设计与制作[J].常州工学院学报,2012(2):6-9.
[3] 肖红. 基于慧鱼技术的六足昆虫仿生机器人的设计[J].荆门职业技术学院学报,2006(3):18-20.
[4] 窦艳涛,黄豪杰,李健,等. 基于慧鱼技术的家用洗碗机方案设计[J]. 实验室研究与探索,2013(3):31-33.
[5] 段振华,吴张永,吴喜,等. 基于慧鱼模型的柔性制造生产线设计[J]. 重庆理工大学学报:自然科学版,2012(4): 62-65.
[6] 卢桂萍,何宇斌. 基于慧鱼创意组合模型的车库门禁系统设计与实现[J]. 数字技术与应用,2013(4):208-209.
[7] 郑轩,韩蕾. 基于ROBO Pro的管道除渣机器人的设计[J]. 机电技术,2007(3): 17-19.
TheDesignandFabricationofCommodityPackingLineBasedonFischertechnikModel
ZHOU Xu-rong1,2, LIU Tian-jun3, YANG Bu-chao1, HU Jia-wei1, ZHUANG Bao1, ZHANG Jian1
(1.School of Mechanical and Vehicular Engineering, Changzhou Institute of Technology,Changzhou Jiangsu 213032, China;2.College of Mechanical and Electrical Engineering, Hohai University, Changzhou Jiangsu 213022, China;3. School of Mathematical and Chemical, Changzhou Institute of Technology, Changzhou Jiangsu 213032, China)
Because of the lack of function and inconvenience of current packaging machine, it is unable to meet the growing packing needs for online stores. It is proposed that the packaging process from four sides to the carton board to the loading object. The improvement was made based on the existing commodity packaging machine, with rolling out, mobile platforms, pneumatic suction component, capping, bottom gluing, filling, loading, and transshipment manipulator. It completed the overall design of the commodity packing line, so as to improve the automation and variety of commodity packaging and greatly improve the operation of the online store.
Fischertechnik; ROBO Pro software; packing; convenient; pipeline
TH111
A
1009-7961(2017)05-0001-07
2017-05-15
周叙荣(1976-),男,安徽当涂人,高级工程师,在读博士,主要从事特种加工技术研究。
(责任编辑:孙文彬)
猜你喜欢
疯狂英语·新悦读(2023年11期)2023-12-26 09:32:50
汉语世界(The World of Chinese)(2023年2期)2023-06-22 14:50:17
小猕猴学习画刊(2022年12期)2022-02-06 02:59:22
数学小灵通(1-2年级)(2021年6期)2021-07-16 05:21:00
小学科学(学生版)(2020年2期)2020-03-03 13:40:16
数学大王·低年级(2019年10期)2019-11-25 02:38:18
小太阳画报(2019年3期)2019-06-11 10:29:47
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
中国资源综合利用(2016年9期)2016-01-22 08:35:22
印刷技术·包装装潢(2015年4期)2015-07-09 11:18:46