基于北斗高精度定位的接触网杆位测量系统研究
2017-11-08 12:34:16周少喻许建国
电气化铁道 2017年5期
周少喻,许建国
基于北斗高精度定位的接触网杆位测量系统研究
周少喻,许建国
目前我国铁路精准放样主要采用GPS系统,而北斗系统在铁路领域应用较少。本文首先阐述北斗高精度定位技术的数据流程及原理,研究基于北斗高精度定位的接触网杆位测量系统,同时提出接触网杆位放样可视化操作,最后对北斗高精度定位技术和铁路专用电子地图生成等关键技术进行详细论述。
北斗高精度定位技术;接触网杆位放样;可视化;数据库
0 引言
北斗卫星导航系统[1]全球组网加速,北斗高精度定位技术的精度已经达到事后毫米级、实时厘米级。随着铁路建设的快速发展,铁路建设施工对高精度定位的需求越来越多,尤其是对接触网杆位高精度测量需求迫切。通过研究基于北斗高精度定位的接触网杆位测量技术,可快速、方便、准确地获取接触网杆位高精度位置数据,形成高精度数据库,并为铁路的“一路一库”预留接口。
基于北斗高精度定位[2]的接触网杆位测量系统,在铁路专用电子地图上标定显示,可为铁路施工人员提供接触网杆位放样可视化界面交互,提高铁路施工项目的精准度和管理水平。
1 北斗高精度定位技术的数据流程
北斗卫星导航系统是我国自主研发并独立运行的全球卫星导航系统。北斗卫星导航系统由地面控制站、空间站和用户终端组成,计划到2020年实现全球布网。北斗卫星导航系统采用码分多址技术处理不同的卫星信号,以实现为整个亚太区域提供全天候、全天时的定位、导航、授时等服务功能。北斗卫星导航系统与其他系统,如美国GPS或者GLONASS导航系统有一定区别,能够提供独特的短消息通信服务,可应用于海洋、铁路、智慧城市等领域。
基于北斗高精度定位的接触网杆位测量系统依靠北斗导航系统,利用北斗高精度定位技术实现厘米级定位,其北斗基准站通过电台或者3/4G等公网将卫星伪距、载波相位观测量[3]、基准站的坐标以及天线高度等信息传输给流动站,流动站完成初始化后,接收北斗卫星观测量数据,并与接收到的基准站的信息进行差分实时处理,计算得到厘米级定位结果,其数据流程见图1。
2 基于北斗定位的接触网杆位测量系统
基于北斗高精度定位的接触网杆位测量系统利用北斗高精度定位手持测量仪在野外铁路沿线采集数据,自动记录并存储,快速定位放样点,将数据利用电台或3/4G网络传输到地面控制中心服务器进行处理,保证放样作业快速、准确、高效率。同时由计算机建立数据库,生成并更新铁路专用电子地图,有利于后续的成果应用和信息管理。
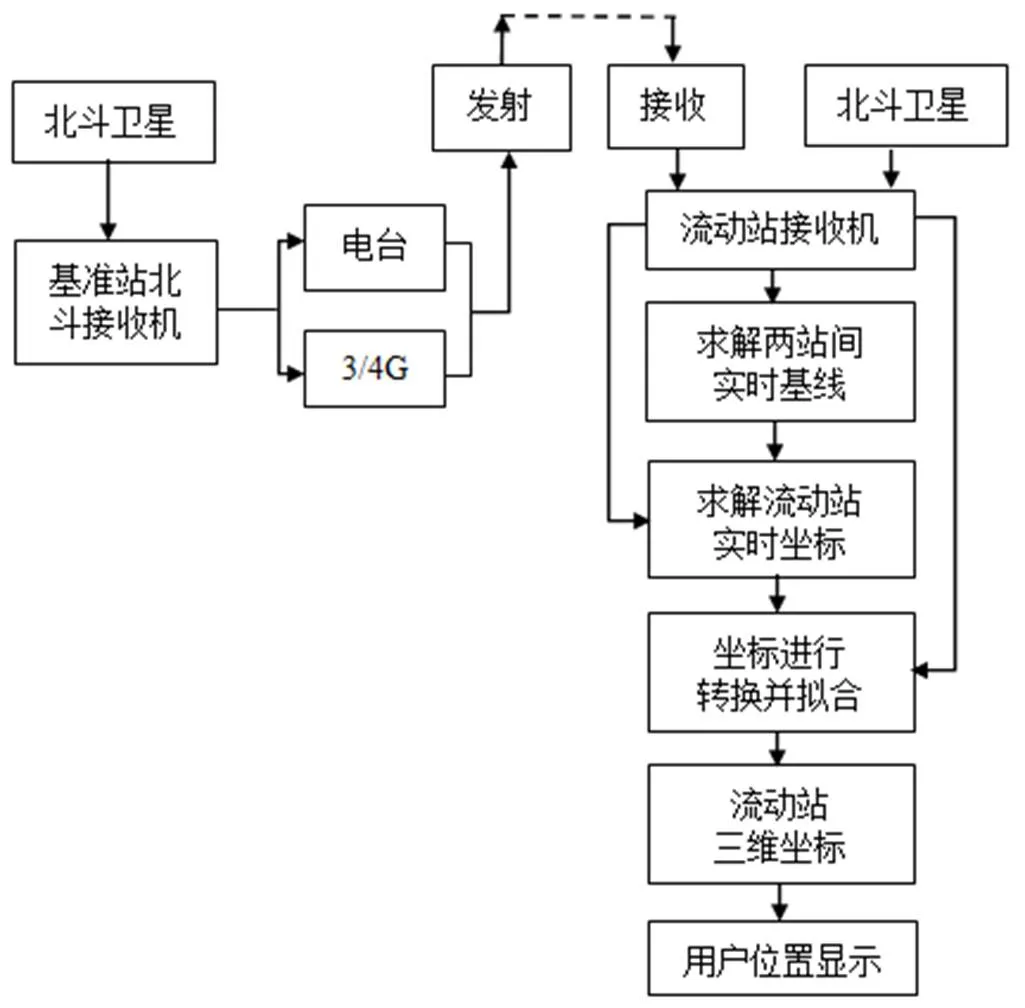
图1 北斗高精度定位技术的数据流程
2.1 工程管理
基于北斗高精度定位的接触网杆位测量系统工程管理需要输入工程名、作者以及日期,使用和选择与工程一致的坐标参数(坐标系、投影、基准转换、平面校正、高度拟合等),如使用新坐标系,需要重新选择坐标系,并输入中央子午线参数。
2.2 系统功能
基于北斗高精度定位的接触网杆位测量系统[4]在测量过程中,铁路专用电子地图上的点、线、面以不同颜色或样式显示,在地图上选择待放样的点或线,并设置为终点,根据导航方向即可找到接触网杆位放样点(图2)。系统主要功能如下:
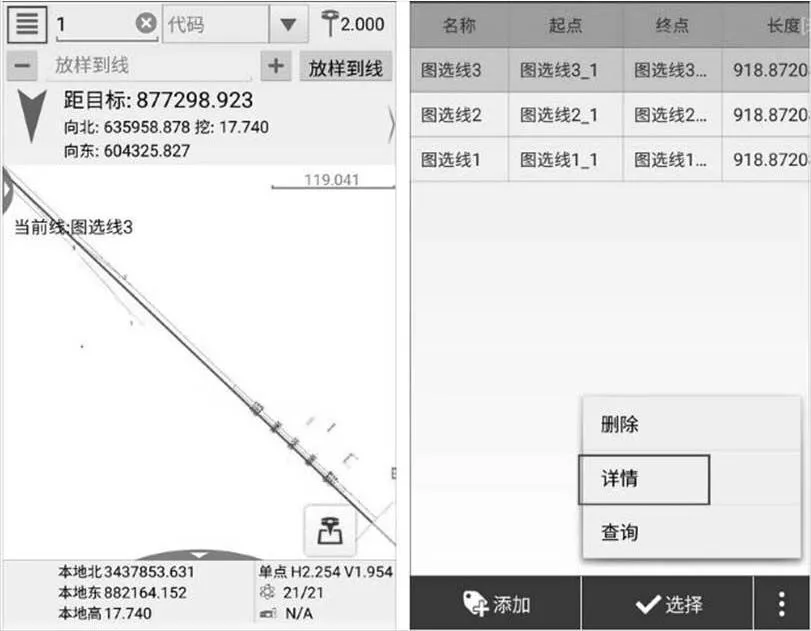
图2 接触网杆位放样选线
(1)点校正。根据WGS-84和当地平面直角坐标系,经过坐标转换计算转换参数,利用转换参数进行点校正,系统校正成功会提示“平面校正成功、高程拟合成功”信息,将当前计算的校正参数应用到坐标系参数中,对整个工程任务生效,用户登录可查看平面校正和高程拟合参数,否则参数不显示(图3)。

图3 系统点校正
(2)接触网杆位放样。系统根据提示找到待放样点,当施工人员接近目标时,设备发出提示音,距目标越近提示音越急促,在目标点点击左下角绿色图标,静止5 s,放样成功,系统会自动显示下一个待放样点的位置并引导前往(图4)。

图4 放样导航
3 关键技术研究
3.1 北斗高精度定位技术原理
采用载波相位动态实时差分技术的北斗高精度测量可实现在指定坐标下实时提供三维坐标定位结果,定位精度达到厘米级,北斗高精度定位系统在基准站观察第颗北斗卫星并取得伪距,伪距计算式为




北斗高精度用户机可计算卫星的伪距为

式中,u为移动北斗高精度接收机的噪声。

若基准站和高精度接收机可同时观察的卫星数目在4颗以上,则有4个以上方程,可解4个参数,即北斗高精度用户机坐标(u,u,u),其中D包含了一系列误差参数:
D=(u-j) +(u-j) + (u-j)
北斗卫星载波相位观测量的值为

北斗基准站利用公网或电台等传输链路将载波相位数据传输到北斗高精度用户机进行差分:
通过以上计算式可计算观测卫星的整周模糊度和载波相位的小数部分,在一个历元周期内观察4颗以上卫星,即可计算出北斗高精度用户机的精确坐标位置,精度可以达到厘米级。
3.2 铁路线路专用地图生成技术
基于北斗高精度定位的接触网杆位测量系统中上位机软件的铁路专用电子地图可以导入预先设定的线路数据坐标文件或站区线路电子图文件,生成线路(轨道)数字地图,通过GIS平台实现采集、管理、分析、输出各种地理信息的功能,并支持空间数据管理。铁路线路还存在道岔,路线多为空间曲线,GIS系统将地图的表格型数据(来自数据库、电子表格或在程序中直接输入)与北斗高精度定位数据直接拟合转换为地理图形进行显示,然后对显示结果进行浏览。
3.2.1 轨道地图数据处理流程图
轨道数字地图的数据处理流程见图5。
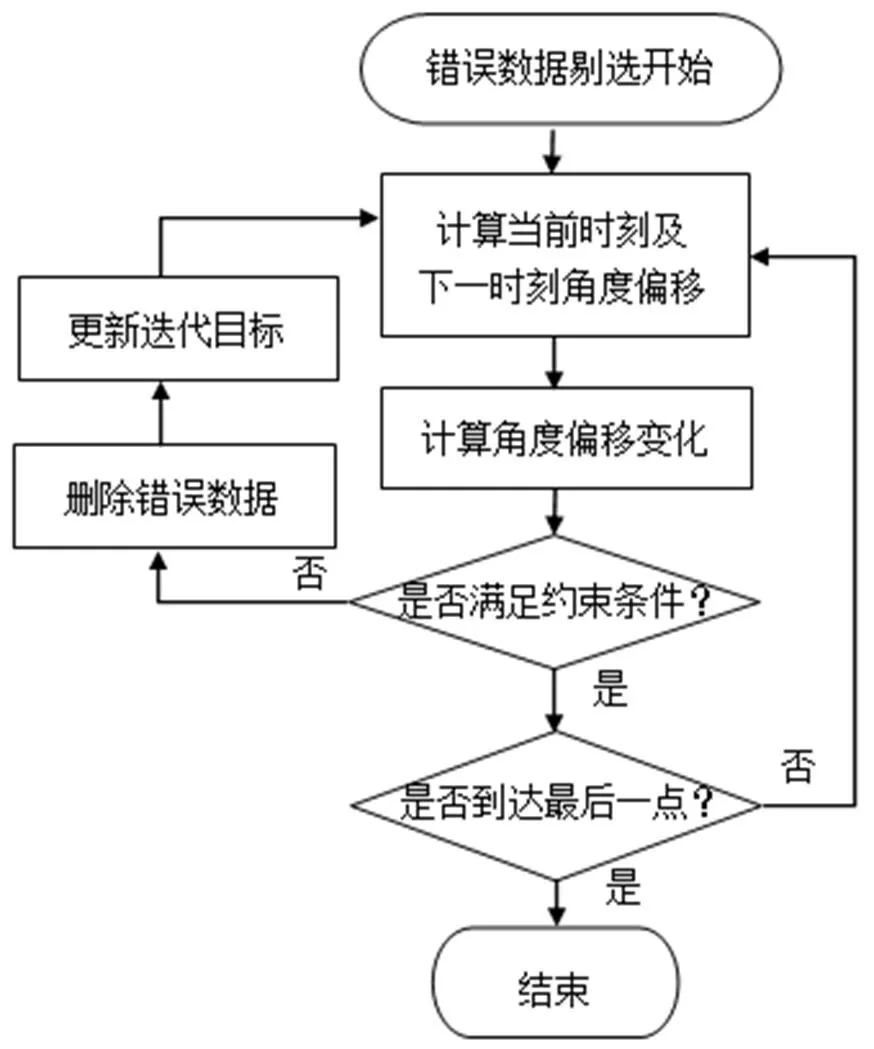
图5 轨道地图数据处理流程
数据处理及地图生成算法流程如下:
(1)通过北斗高精度测试仪采集铁路线路的数据集,其中数据点(x,y)∈。
(2)数据的剔选。剔除采集的铁路线路数据中的错误数据。
(3)轨道线路形态判别:利用剔选后数据集的相邻点连线斜率变化判定直线线路、曲线线路的组成,得到轨道线路组成结构。
(4)拟合。对剔选后的数据在精度约束条件下进行约简,得到铁路线路拟合数据集。
3.2.2 混合曲线轨道地图拟合算法
考虑铁路轨道线路组成的结构,利用插值节点对轨道线路进行分段拟合,分为段,若曲线部分s段,直线部分I段,则=s+I。若曲线部分坐标为(S,j()),直线部分坐标为(I,q()),在曲、直线相连的值节点处(I,q())与(S,j())为同一点。
(1)曲线线路部分拟合。3次样条函数分段拟合,边界条件应符合形态约束的轨道曲线,如果两边的插值节点都为曲线,则曲线拟合的第一类边界条件为相邻线的斜率。曲线表达式为
j() =j3+j2+jx +j,(=1,2,3,…,s) (1)
(2)直线线路部分拟合。利用直线两端端点的坐标,计算函数的表达式并进行拟合,直线表达式为
q() =qI+q,(=1,2,3,…,I) (2)
(3)校验。在精度约束t下,对拟合后的分段曲线利用原始数据进行误差校验,若存在不满足轨道曲线精度约束,可适当增加插值数据,再重新拟合多次,直至可以保证线路地图的精度。
(4)整理。通过叠加分段拟合曲线,得到混合曲线分段拟合的完整轨道地图,表达式为
式(3)为曲线部分拟合表达式,式(4)为直线部分拟合表达式。
4 结语
本文基于北斗高精度定位技术研究的接触网杆位测量系统,可以弥补以往单一GPS系统的不足,以铁路线路、接触网杆位大数据和交互标定显示为基础,结合地图生成技术、GIS技术、计算机软件[5]等技术,最终构建面向铁路建设施工需求的接触网杆位测量系统。该系统极大提高了测量工作效率,降低了施工成本,减小了测量人员户外作业的劳动强度,此外对于转变铁路施工从粗放式管理到精细化管理具有重要意义。因此,基于北斗高精度定位的接触网杆位测量系统具有非常广阔的应用前景。
[1] 李国重. 北斗卫星导航系统星座可靠性的建模、计算与评价[D].郑州:信息工程大学,2011.
[2] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报,2010.
[3] 雒应. 北斗实时动态定位技术在公路定线测量中的应用与精度分析[J]. 长安大学学报,2002.
[4] Microsoft Co.:《Microsoft Developer Network (MSDN) 2005》.
[5] 彭剑. 基于ARM嵌入式系统的GPS地图匹配系统[D]. 南京:东南大学,2006.
[6] 陈龙飞,金其坤. 工程测量[M]. 北京:同济大学出版社,1990.
At present, the accurate lofting of domestic railway construction engineering is mainly depending on GPS system, with less application of Beidou navigation system. The paper illustrates firstly the data flows and principles of high precise positioning technology of Beidou navigation system, introduces the researches on OCS mast position measurement system based on Beidou high precise positioning technology for OCS mast measurement system, and describes in details the key technologies of high precise positioning technology and generation of railway dedicated electronic map.
Beidou high precise positioning technology; catenary mast lofting; visualization; database
10.19587/j.cnki.1007-936x.2017.05.001
U225.1
A
1007-936X(2017)05-0001-04
周少喻.中国铁路总公司,高级工程师;许建国.中铁电气化局集团有限公司,教授级高级工程师。
2017-04-27
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:31:54
云南画报(2021年10期)2021-11-24 01:06:38
环球时报(2020-10-26)2020-10-26 11:15:20
上海铁道增刊(2017年3期)2018-01-22 03:01:24
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
西南交通大学学报(2016年3期)2016-06-15 20:29:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:37
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41