图书馆智能化机器人三项关键技术的研究与探讨
2017-11-08 01:38赵志光
山东图书馆学刊 2017年5期
赵志光
(广州市越秀区图书馆,广东广州 510080)
图书馆智能化机器人三项关键技术的研究与探讨
赵志光
(广州市越秀区图书馆,广东广州 510080)
现代图书馆引入图书馆智能化机器人技术,是为了更好地提高图书馆工作和服务效能的重要措施,它代表了现代图书馆发展的一个方向。本文对图书馆智能化机器人研究中的三项关键性技术,即文献定位技术、自动导航技术、文献拾取技术进行研究和探讨,目的是为图书馆引入适合本馆利用的智能化机器人提供借鉴和参考。
图书馆 图书馆自动化 智能机器人
始于26年前的图书馆智能化机器人技术,现在已经发展成为图书馆重要的现代化新技术之一,它代表了现代图书馆发展的一个方向。图书馆引入智能化机器人技术,可以更好地提高图书馆管理工作的效能和服务工作的效率[1]。在此,对图书馆智能化机器人技术中的3项关键性技术,即图书馆智能化机器人技术中的文献定位技术、文献导航技术和文献拾取技术进行研究和探讨,目的是为图书馆引入适合本馆使用的图书馆智能化机器人系统,以及为之进行的自动化改造主流建构方案提供借鉴和参考。
1 图书馆智能化机器人技术中的文献定位技术研究
1.1 条形码结合磁条定位技术
图书馆智能化机器人的文献定位技术,就是要帮助图书馆机器人解决图书馆馆藏文献被定位在哪里的问题,它是为图书馆智能化机器人后续的文献导航技术和文献拾取技术提供基础的先导性技术。目前,图书馆文献定位技术主要分为两种,即条形码结合磁条定位技术和无线射频识别定位技术(RFID)[2]。利用条形码结合磁条进行文献定位技术,有几个突出的特点,一是技术相对成熟;二是条形码和磁条的成本低廉,使用寿命长;三是操作简单,使用激光条形码扫描枪(仪)即可识别;四是不用为图书增加特殊编码,不增加馆员工作量;五是不用为图书内嵌芯片,不需更换现有设备。正因如此,目前国内大多数图书馆都在采用条形码结合磁条进行文献定位技术。它可以让读者不需要再根据传统的索书号查找文献,而是根据文献在书架上的实际位置查找。这样一来,读者就可以自己规划索取文献的路径,让索取文献不再走许多冤枉路。这样不仅节约了宝贵的时间,也愉悦了读者的心情。这种文献的排架数据可以整合到各种应用平台,如手机移动图书馆APP、微信图书馆、微信小程序、扩展到OPAC、图书馆智能化机器人交互导引终端等,为读者索取文献提供了极大的方便。然而,这一技术在图书馆智能化机器人的文献定位应用中还是有一定局限性的。原因在于,一则,条形码技术的缺点是防盗性能差,为了提高防盗性能,必须同时在文献的书脊内侧装入一根或一根以上可充消磁的磁条。但是安装磁条的这一工序目前必须是手工操作,不适宜机器人操作,所以它存在劳动强度大、工作效率低的问题。二则,即使在文献中安装了磁条,由于安装位置和精度如果达不到要求,往往也容易遭到破坏,或被不良读者撕掉,出现被盗风险。三则,条形码信息涵盖的内容十分有限,不适用于图书馆智能化机器人要求含有大量信息的精确定位、四则,如出现遮挡物,扫描器无法进行扫描识别。所以,一维条形码识别配合磁条对文献的定位技术,一般仅限于使用在图书馆智能化机器人中的固定性自动借还书设备中,而对于移动性的图书馆智能化机器人定位文献则具有很大的难度。
1.2 无线射频识别定位技术
无线射频识别(Radio Frequency Identification,简称RFID )文献定位技术,是目前比较适合图书馆智能化机器人进行文献定位的一种技术。它是基于电磁理论的无线射频技术,通过非接触式的方式实现文献的自动识别和定位的,RFID俗称电子标签。它弥补了条形码和磁条文献定位技术必须用激光扫描枪直接扫描读取信息,对于条形码也只能一个一个地读取识别等多种缺陷,兼具有安全磁条和条形码的两种功能,既可以防盗,又可以报警。此外,也能记载更多的文献内在内容信息和外在借还流通信息,这是因为它可以具有非常大的信息储存量。同时,它还具有体积轻薄、质地柔韧、信息量大、读取方便等突出特点,可以极大地提高了文献阅读器的读取效率。此外,RFID文献定位技术采用的无线电射频,可以透过外部材料读取文献的数据,可以同时对多册文献进行识读,所以,RFID文献定位技术也适用于利用图书馆智能化机器人进行文献的清点工作。它不仅可以增强清点文献的准确性,而且其工作效率也可以达到普通文献清点方法的数倍[4]。同时,读者利用基于RFID技术的图书馆自助借还设备,仅需要10秒的时间,就可以完成多本图书的自助图书借阅,同时在后台自动完成所借图书资料所有数据的出入书库,以及所借图书的防盗代码变更,读者不需再对所借图书进行充消磁操作,大大缩短了读者的借阅时间,实现快速高效的文献借阅流通[5]。不过,RFID文献定位技术的建立也有其局限性,它要求对传统的书架进行以适应图书馆智能化机器人所需要的全新改造。此外,由于RFID技术本身发展的局限性,在实际使用中,它还存在着一些识别不精确,存在误差,技术标准不统一,标签面积过大,费用相对较高等问题。所以,对于RFID定位机器人的设计和研发,早期因为可操作性不强的原因并没有得到广泛的实际应用。近年来,随着RFID定位技术的进一步完善和发展,以及图书馆界认识的提高,它已经成为图书馆智能机器人使用的主流定位技术。
2 图书馆智能化机器人技术中的自动导航技术研究
2.1 图书馆智能化机器人自动导航技术的方式
由于图书馆智能化机器人是属于移动性机器人,与固定性机器人不同,其自动导航技术是最基础和最重要的一个功能,也是最能体现图书馆智能化移动机器人自动化和智能化程度及实际应用的关键所在[6]。在机器人导航控制领域,根据设计和技术的不同要求,分别可以采用一种或多种不同的导航方式。目前在图书馆智能化机器人的文献导航技术中,已经较多地采用了电磁导航和激光导航技术方式。如目前国内由南京大学计算机软件新技术国家重点实验室和江苏省物联网测试与验证技术中心联合开发研制的,已经在南京大学仙林校区杜厦图书馆外文阅览室投入使用的第一代智能机器人书车,就是采用的电磁导航技术。其第二代图书馆智能化机器人,则由磁导航方式改为通过激光传感器进行自主导航的激光导航技术方式[7]。与此同时,又安装了语音系统,使图书馆智能化机器人在工作过程中与读者相遇时,通过语音系统能够说出一些常用的问候语,用以增强图书馆智能化机器人在服务过程中的更加人性化设计。此外,图书馆智能化机器人的自动导航技术方式,还有利用超声波传感器发射和接受超声波信号的超声波导航,利用红外传感技术的光学导航,采用陀螺仪简写方式来进行的惯性导航,能识别特殊环境标志的路标导航。在计算机视觉导航技术中,有创建地图的固定环境模式视觉导航技术,以及识别环境颜色的颜色环境模式视觉导航技术。GPS全球定位导航技术,由于其精度不高,因此,一般没有应用在图书馆智能化机器人的地洞导航技术中。
2.2 图书馆智能化机器人自动导航程序的设计因素
图书馆智能化机器人的导航技术,无论选用哪种导航方式,都必须依靠图书馆多种环境信息的采集和运用。在图书馆智能化机器人导航程序的设计因素中,一方面,由于图书馆馆舍环境是稳定的,书库的结构环境也是稳定的,书库中文献的排放位置在一定时间范围内也是相对稳定的,所以,这种图书馆环境信息在采集和运用中的多重稳定性因素,十分有利于图书馆智能化机器人导航程序的设计。另一方面,图书馆智能化机器人导航系统中动态化的可变信息,主要来自于图书馆文献外借和还回的动态流通变化,以及读者信息数据的相对动态变化,如读者信息的增减变化。而这些文献动态化信息的采集和应用,对于图书馆智能机器人来讲也是比较容易实现的[8]。因此,总的来看,图书馆智能化机器人的导航技术,无论采用哪种方式,不仅是可以实现的,而且其实现也是相对比较容易的。图书馆智能化机器人导航技术的关键因素,则是在于其文献导航应用的准确性和快速性两方面。图1为德国洪堡大学科学图书馆机器人在各楼层之间不断往返穿梭运送和收回书刊,电梯门口设置有金属感应条,机器人行至电梯门口时,电梯会自动打开,驶出后则自动关闭。
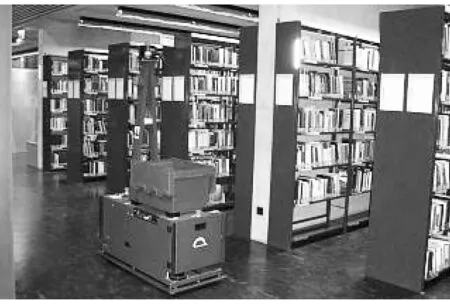
图1 机器人在各楼层之间不断往返穿梭运送和收回文献
2.3 图书馆智能化机器人的单纯导航系统设计研究
如果单纯使用图书馆智能化机器人的自动导航系统,也可将其应用于图书馆智能化排架机器人或智能化巡架机器人中[9]。以图书馆智能化排架机器人为例,它主要是由机器人的取书整理机构和文献排序机构两部分所组成。其中它的取书整理机构,定位在书架的某一层进行取书整理,并将文献运送至排序机构进行排序。等到排序完成后,又通过取书整理机构将文献送回到原来的书架上。图书馆巡架机器人则是专门用于图书馆巡查文献排架正确与否,并将错架的文献编号予以记录,以便图书馆工作人员能够及时予以纠正的机器人。此类图书馆智能化巡架机器人,2015年已经在新加坡白沙公共图书馆的检查文献排架中实际投入使用,并且使用效果良好(见图2)。我国新松机器人自动化股份有限公司和美国英特尔公司,联合研制的“松果”系列服务机器人,其中就包括可用于图书馆的智能机器人。它较强的自助导航功能,能够对此前没有走过的陌生环境进行自动建模,并能够对外借环境进行全方位感知,能够实现自助行走和自助避让,并具备前方视觉识别,后方视觉引导,能够识别读者,向读者问候,并能够引导读者和为读者进行必要的讲解服务。

图2 图书馆智能化文献巡架机器人
3 图书馆智能化机器人技术中的文献拾取技术研究
3.1 图书馆智能化机器人移动平台的设计研究
图书馆智能化机器人技术的重点是机器人模仿工作人员对于图书馆文献的自动拾取技术[10]。从图书馆智能化机器人设计的角度讲,拾取技术主要有3部分的设计:机器人移动平台的设计,机器人拾取机械手臂的结构设计,以及机械手夹持器的设计。根据机器人实现运动方式的不同类型,机器人的移动方式通常有轮式、履带式、多足式和滑轨式4种。从目前图书馆的实际应用效果来看,由于轮式结构具有运动平稳、移动快速、方向灵活和操作简单的优势,所以更加适合应用于图书馆。轮式结构依据车轮的数量,可分为2轮、3轮、4轮和多轮的设计。车轮的布局设计主要的考虑因素是平衡性、稳定性和灵活性。一般3轮和4轮由于其机动性和稳定性相对较好,所以成为优先选择的设计方案[11]。此外,为了防止产生噪音,在图书馆馆舍中保持良好的静音性,车轮的材质适宜选择橡胶轮,不宜采用塑料轮。在图书馆智能化机器人的初级阶段,可以采用机器人和人工相结合的方式进行工作。即这种机器人移动平台往往会被设计为智能书车,其后续的机械手臂和机械手夹持器两步工作,则可以由图书馆工作人员人工完成。如由南京大学研发的,在仙林校区杜厦图书馆外文阅览室投入使用的智能机器人书车就是如此。而德国洪堡大学科学图书馆的智能化机器人移动平台,其基本功能是在图书馆总服务台与各功能区之间自动移动地传送需要上架和分检的文献(见图3)。

图3 行进中的机器人几乎没有声响
3.2 图书馆智能化机器人机械拾取手臂和夹持器的设计研究
图书馆智能化机器人机械拾取手臂的设计,主要有直角坐标垂直升降手臂和多自由度(至少6个自由度)关节型机械手臂两种。直角坐标垂直升降手臂的优点是结构简单,不需要太多复杂的运动学计算,但是其缺点是操作空间往往会受限。多自由度关节型机械手臂可以充分利用相对成熟的工业机器人设计,使其在图书馆工作空间范围和文献拾取的定位精确性方面都得到大幅度提高[12]。图书馆智能化机器人机械手夹持器的设计,要根据图书馆文献的排架方式而确定。图书馆智能化机器人在拾取文献时一般会遇到3种文献的排架情况,一种是单册定位排架,另一种是疏松型排架,还有一种就是紧密型排架。单册定位排架由于是以每册书为一个单位设计的排架存放空间,所以难以适应一般图书馆大量文献的书架排架方式,目前主要应用于24小时自助图书馆的少量(一般为数百册)文献排架。在这种排架方式的情况下,由于机器人机械手夹持器的操作,仅仅是针对固定架格中的单册文献,所以其拾取操作最为简单(见图4)。对于疏松型排架的文献,图书馆智能化机器人机械手夹持器的操作相对而言也较为简单,这是因为由于排架文献之间较为疏松,便于机械手夹持器的进退。而对于目前一般图书馆采用的紧密型排架文献,机器人机械手夹持器的操作就要复杂得多。这是因为需要在夹持器的末端增加具有智能化力觉感知系统的执行器,来感知和适应目前的图书馆紧密型文献排架方式,目的是提高机械手夹持器的力度和灵活性[13]。
图4 图书馆智能化机器人机械手夹持器单册定位排架操作
4 结语
图书馆本身就是随着社会需求和科技进步而诞生、存在和发展的,先进的科学技术成果必然也会在图书馆中得到体现与实践。起始于20世纪90年代的图书馆智能化机器人技术就是典型的代表。随着图书馆智能化机器人关键性技术的不断完善和发展,随着图书馆界对智能化机器人技术认识的不断深化和普及,图书馆智能化机器人技术必然会在现代化的图书馆工作中发挥越来越大的重要作用。今后,会有越来越多的智能化机器人图书馆员不知疲倦地往返奔走在图书馆中[14],为读者提供更加方便、快捷、周到的服务。
〔1〕 赵辰阳,李波.服务机器人在图书馆发展趋势的应用前瞻[J].中国科技信息,2016(16):94,96
〔2〕 倪劼.RFID图书盘点智能机器人的设计与开发[J].新世纪图书馆,2017(2):69-72,81
〔3〕 专业智能排架:把找书变成一种乐趣[EB/OL].[2017-05-22].http://www.gzshufu.com/page/index.html
〔4〕 沈奎林,邵波,陈力军等.基于超高频RFID的图书盘点机器人的设计和实现[J].图书馆学研究,2016(7):24-28
〔5〕 EMID智能图书馆 将用机器人替人工管理[EB/OL].[2017-05-22].http://news.rfidworld.com.cn/2016_05/757bf81621d
5b3b3.html
〔6〕 邓志,黎海超.移动机器人的自动导航技术的研究综述[J].科技资讯,2016(33):142-144
〔7〕 机器人找书路径最短,南大图书馆有了“最强大脑”[EB/OL].[2017-05-22].http://www.chnlib.com/News/2017-02/98300.html
〔8〕 赵晋芳,张海华,郭太君.一种图书搬运机器人的设计[J].福建质量管理,2016(4):138
〔9〕 宋蔓蔓,付正.图书馆巡架机器人关键算法研究[J].知音励志,2016(29):190
〔10〕 方建军,张晔.图书馆图书自动存取机器人的研究与应用[J].图书馆建设,2012(7):79-83
〔11〕 李双岑.服务机器人移动平台的设计[J].电子世界,2017(1):104-105
〔12〕 周毅钧,陈勇明.工业机器人拾取系统[J].化学工程与装备,2016(10):146-148
〔13〕 王宏,杨志成,任惠荣.图书上下架机器人的结构设计及其机器手的样机试验[J].电子世界,2017(2):114-115
〔14〕 于健,白福春.谈图书馆创新之机器人馆员[J].山东图书馆学刊,2016(2):56-59
ResearchandDiscussionontheThreeKeyTechnologiesofLibraryIntelligentRobot
ZhaoZhiguang
The introduction of intelligent robot technology in modern libraries is an important measure to improve the efficiency of library work and service. It represents a direction of modern library development. The paper studies three key technologies of library intelligent robot: document location technology, automatic pilot technology and document picking technology. The purpose of the study is to provide reference for the library to introduce intelligent robot which is suitable for libraries to use.
Library; Library automation; Intelligent robot
G258.94
A
赵志光(1977-),男,馆员,本科。主要研究方向:信息化技术应用和分馆建设。
猜你喜欢
军事文摘(2022年19期)2022-10-18
少年文艺·开心阅读作文(2021年8期)2021-09-05
印刷工业(2020年4期)2020-10-27
小学科学(学生版)(2019年5期)2019-05-21
少儿美术(快乐历史地理)(2019年11期)2019-04-20
小学生导刊(2017年13期)2017-06-15
中国交通信息化(2017年4期)2017-06-06
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
能源(2015年8期)2015-05-26