基于半实物仿真平台的温度控制系统设计
2017-11-06 06:22王凯宸李紫君
实验科学与技术 2017年5期
马 平,王凯宸,李紫君
·实验技术·
基于半实物仿真平台的温度控制系统设计
马 平,王凯宸,李紫君
(华北电力大学 自动化学院,河北 保定 071003)
在工业生产过程中,温度对象的非线性、大迟延特性及其所处的复杂环境,使得在仿真机中研究的控制结构和控制算法在实际工程应用中达不到预期的效果,为了改变这种状况,该文提出了使用半实物仿真平台进行温度控制系统设计和研究的方法。在该平台上,温度对象为实际的电加热水箱及其管道回路,控制器则由Matlab仿真实现,两者通过I/O卡件进行连接。实践表明,在半实物仿真平台上进行的温度控制系统结构设计和算法研究,相比于在仿真机中的研究结果更具有工程应用价值。
温度控制;半实物仿真;过程控制;系统设计
在工业生产过程中,温度是一个常见且重要的物理参数,其不仅直接影响着产品的质量,还与安全生产、系统运行有着密切的关系[1-2]。然而温度对象常具有迟延大、惯性大的特点,且所处的环境较为复杂,干扰因素众多,控制起来较为困难[3]。因此,对温度控制系统进行研究具有重大的意义。
随着计算机性能的提高,对被控对象的研究和控制系统的设计常借助于计算机仿真,但完全依靠计算机仿真也存在一定的问题:1)计算机仿真是以被控对象模型参数的辨识为基础,在辨识过程中,往往存在着误差;2)实际被控对象大多为非线性的,其模型参数往往不是常数,而计算机仿真常是将其在工作点附近进行线性化处理;3)生产现场存在很多不确定的干扰因素,这些因素很难在所辨识的对象中体现出来;4)某些工业生产过程较为复杂,进行模型辨识的难度大[4-9]。因此,可以将实际的被控对象引入计算机仿真的控制回路中,控制器和控制算法在计算机上通过编程实现,这样的研究思路也称为半实物仿真[10~12]。
1 半实物仿真平台结构
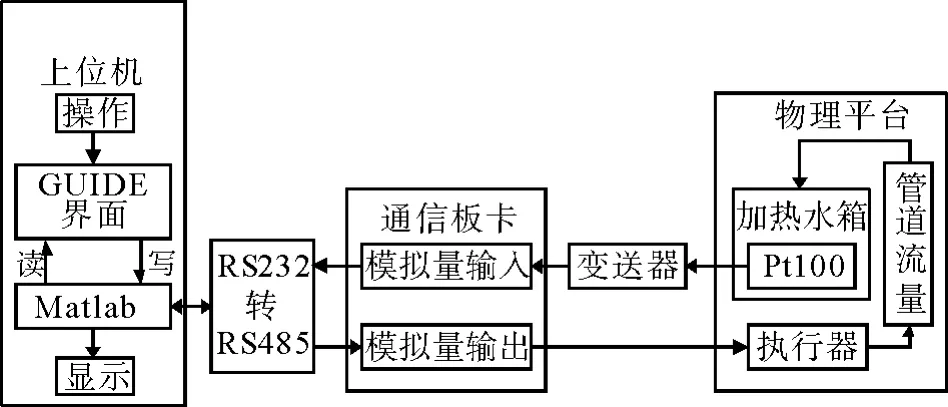
图1 半实物仿真平台结构
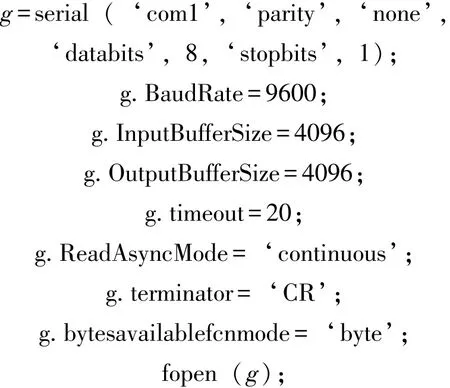
本文所介绍的半实物仿真平台主要由上位机、通讯板卡以及物理平台3部分组成,其总体结构如图1所示。在上位机中,通过Matlab编程实现控制算法的设计和图像的显示,操作界面使用Matlab的GUIDE功能进行设计。上位机与通讯板卡的数据交换是使用Matlab自有的串行通讯功能,并且通过RS-232转RS-485转换器实现两者之间的连接[13]。使用Matlab打开串口进行通信的代码如下:
通信板卡作为计算机与物理平台之间的桥梁,其又分为模拟量输入模块和模拟量输出模块。模拟量输入模块的输入特性为0~5 VDC,其能够采集物理平台上的模拟量数据,然后将其转换成数字量并存储在缓存空间中,等待计算机的读取。模拟量输出模块的输出特性为4~20 mA直流电流,其能够将计算机送达的数字量转换成模拟量进行输出,同时在下一个输出指令到达之前保持当前的输出值。
在物理平台上,电加热水箱及其管道回路组成系统的被控对象。在水箱内装有可变功率的电加热棒,其功率的大小由三相调压模块进行控制,用于对水进行加热。水温由Pt100进行测量,由变送器转换成0~5 VDC传送到通信板卡中。控制回路中使用的执行器为电动阀,其输入为4~20 mA的电流,输出为0~100的阀门开度,控制流入加热水箱的减温水流量,从而达到控制水温的目的。
2 温度控制系统设计
2.1 控制系统结构

图2 温度控制系统方框图
如图2所示,为温度控制系统方框图。其主要由调节器、执行器、被控对象、测温装置和变送器组成。其中调节器采用PID控制器;执行器为电动调节阀;被控对象为电加热水箱及其管道回路;测量装置为Pt100[14]。其中,电动调节阀的阀门开度作为调节量,水温作为被调量。
2.2 温度对象的数学模型
由前文的介绍可知,电加热器是安装在加热水箱当中的。电加热器产生的热量,一方面引起水箱内水温的上升,另一部分则通过热传递散发到周围环境中[15-16]。同时,由于系统中存在减温水,在其作用下还要再带走一部分的热量。通过查阅文献[17-20]以及根据热量守恒方程,可以得到如下的微分方程:

式中,输出T(t)为t时刻加热水箱内水的温度,输入q(t)为t时刻流入加热水箱的减温水流量,C为水的比热容,ρ为水的密度,V为加热水箱的体积,Q为加热器的加热功率,α为容器的散热率,Te为环境温度,T0为减温水的温度。其中,C、ρ、α、V、Q、Te和T0均为常数。
补充说明一点,虽然加热器的加热功率是可以调节的,但是在实验过程中一旦设置好了加热功率便不会再改变。因此,此处的加热功率视为常数。
显然,式 (1)是非线性微分方程,在工作点(T,q)附近进行小增量 (ΔT,Δq)线性化,可得:
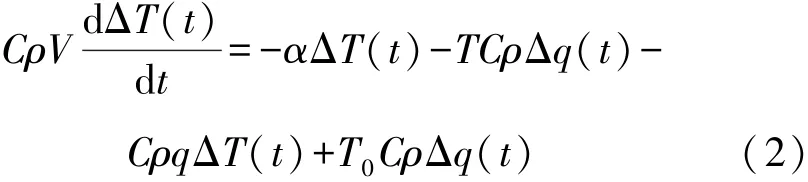
为了获得其传递函数,对式 (2)进行拉普拉斯变换,可得:

因此,Δq(s)到ΔT(s)的传递函数为:

式中,K1为 Δq(s)到 ΔT(s)的稳态增益,T1为Δq(s)到ΔT(s)的时间常数。
由于实际的温度控制对象还存在一定的时滞,所以其模型还应带上纯迟延环节,即为:

管道内减温水的流量是由电动阀的阀门开度控制的,Δu(s)到Δq(s)常可用一阶惯性环节来近似,即为:

式中,K2为管道流量的增益,T2为管道流量的时间常数。
由控制系统方框图可以知道,电加热水箱及其管道回路组成的被控对象应为G1(s)和G2(s)的串联,即为Δu(s)到ΔT(s)的传递函数,由式(5)和式(6)可得:

2.3 方案设计
如图3所示,为温度控制系统的工艺流程图。水在水箱中以恒定的功率被加热,水温由Pt100测量后通过温度变送器与给定值进行比较,当两者存在偏差时,PID控制器动作,改变电动调节阀的阀门开度大小,进而改变流入加热水箱中减温水的流量,最终达到控制水温的目的。

图3 温度控制系统工艺流程图
在最初的设计当中,并没有冷水入口和热水出口。水泵2从储水箱中抽水作为减温水加入到加热水箱当中,加热水箱中的热水则通过溢流管直接流进储水箱内。由于储水箱的储水容量为60 L,加热棒的额定功率为1 600 W,由热量守恒定律有:

式中:Q为单位时间内水的吸热量;
C为水的比热容,4 200 J/(kg·℃);
m为水的质量;
Δt为水吸热前后的温差。
将设备的基本数据代入式(8)计算有:

由计算的结果可知,储水箱中的水温每秒上升0.006 35℃。在设备启动的初始状态下,加热水箱中的水温比减温水的温度高约5℃,而温度控制实验的给定值比初始的稳态温度高2℃左右。假设系统的过渡过程时间约为500 s。由此可以看出,当系统运行500 s后,储水箱中的水温上升了约3℃,这使得加热水箱中的水温与减温水的温差减小,极大地降低了减温水的降温效果,使得系统的控制品质变差。
因此,在原方案的基础上,又分别设计了一个冷水入口和热水出口。冷水入口连接的是自来水,直接将外部的冷水引入系统的水循环中,热水的出口处设置了水泵1,由其将系统中的热水抽到外部环境中排出,通过调整冷水的进水量和热水的出水量保证系统中有充足的水能够进行循环。通过这样的设计,能有效抑制减温水温度的上升,实现水温的精确控制。
3 仿真及结果
3.1 系统初始化
首先,将系统设置为手动运行,给定一个初始的阀门开度,灌满加热水箱。当水在系统内部稳定地流动时,打开加热棒的电源,对水箱中的水进行加热。接着,打开监控画面,观察水温在手动的状态下是否达到稳定状态,当水温稳定时,表明系统已经处于稳定的初始运行状态。此时,将系统投入自动运行状态,即可开始进行相关的实验。
3.2 对象辨识

图4 阶跃响应曲线
获得温度对象的阶跃响应曲线后,在离线状态下用粒子群算法进行模型参数的辨识,辨识结果如图4中的实线所示,其传递函数为:

3.3 控制器参数整定
系统初始的PID控制器参数为Kp=-0.2,Ki=-0.002,Kd=0,如图5所示,为该参数所得的温度输出曲线。
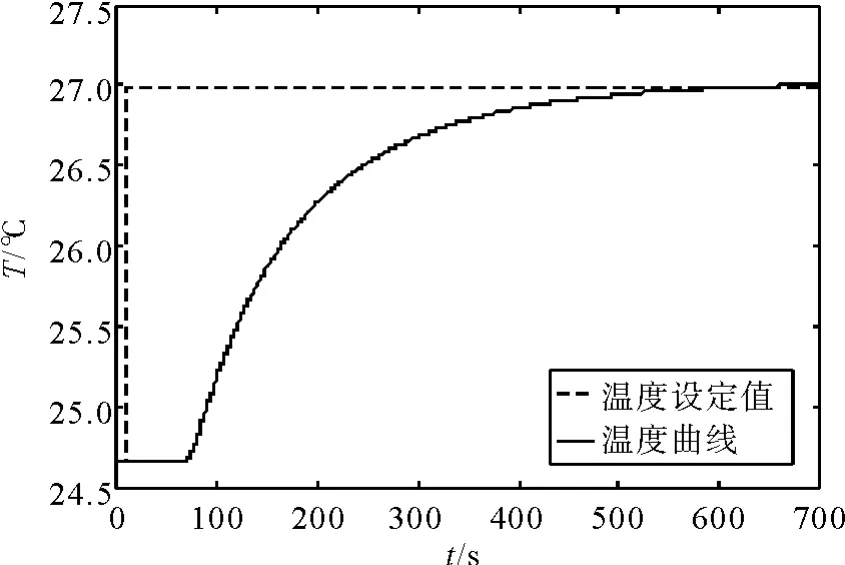
图5 温度曲线 (K p=-0.2,K i=-0.002)
由图5的曲线可以看出,系统的初始温度为24.6℃,温度设定值为27.0℃,在该控制器参数的作用下,系统没有超调,过渡过程较缓慢,经历了约550 s达到稳态。因此在整定参数的时候,可以适当地增加比例增益和积分增益,提高系统的响应速度。
通过反复在线调试,整定后PID控制器的参数为Kp=-0.25, Ki=-0.006, Kd=0, 如图 6 所示,为整定后的温度输出曲线。
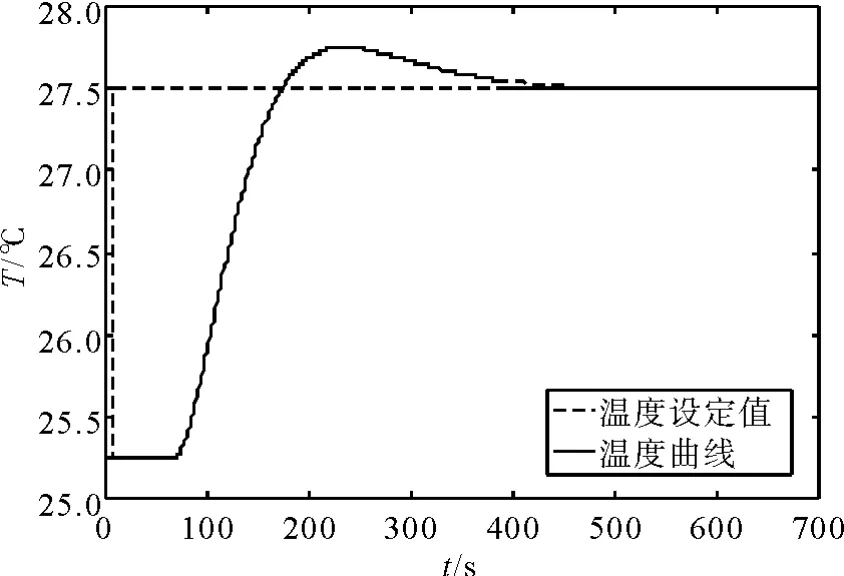
图6 温度曲线 (K p=-0.25,K i=-0.006)
由图6的曲线可以看出,系统的初始温度为25.25℃,给定值为27.5℃。整定后的控制系统响应速度明显加快了,约经过400 s达到稳态,其峰值为27.75℃,超调量小于20,没有稳态误差。
4 结束语
通过在半实物仿真平台上建立实际的被控对象模型,解决了温度对象难以建立精确的数学模型的问题,弥补了使用仿真机进行研究时的不足,这为研究大滞后、大惯性对象的控制算法提供了一个可行的方案。
在本文所设计的温度控制系统半实物仿真平台上,不仅能实现PID控制算法,还能实现史密斯预估补偿算法、预测控制算法等,也能进行控制系统结构的设计,如串级控制结构、前馈控制结构、比值控制结构等。并且在实验过程中,设备操作简单,控制器参数可以在线调试,能够更加直观地看到系统的运行过程,便于分析与解决问题。
由于这套系统中使用的被控对象为实际的物理对象,所以其研究结果相比于在仿真机上的研究结果更具有工程应用价值。
[1]殷斌.基于单片机的温度控制系统的研究[J].机电工程,2015(6):887-890.
[2]陈旭灿.基于单片机的温度控制系统的研究与实现[J].电子技术与软件工程,2014(14):269.
[3]金以慧.过程控制[M].北京:清华大学出版社,2013.
[4]宋锋,刘瑞歌.基于Labview的锅炉温度过程控制系统仿真[J].化工自动化及仪表,2015(2):183-185.
[5]高彬彬,李宇华,高丙朋,等.基于S7-300PLC和组态软件的分布式温度控制系统[J].实验室研究与探索,2015(4):96-98,116.
[6]MATTI L,TAPIO V,GUSTAFSSON J.Semi-physical environment for servo system controller design[J].Microprocessors and Microsystems, 2000, 24(1):34-35.
[7]DARCY B, BRAIN J, RICHARD B.Semi-physical simulation[J].Transportation Research Part C:Emerging Technologies, 2010, 12(1):46-47.
[8]庄源昌,高罗卿,郑湃,等.基于Labview和Matlab的模糊PID温度控制系统研发[J].计算机测量与控制,2014(8):2485-2487,2507.
[9]李航.基于半实物仿真技术的模型预测控制研究与实现[D].天津:天津理工大学,2014.
[10]朱永德.半实物仿真实验系统的设计与应用[D].大连:大连理工大学,2014.
[11]FAN C.A simulation study of real-time scheduling and handling schemes for multimedia support[J].Simulation Practice and Theory, 2007, 7(2):33-36.
[12]GREGA W,KOLEK K.Simulation and real-time control:from simulation to industrial application[J].Computer Aided Control System Design,2002(4):36-40.
[13]MACHACEK J.Control of serial port(RS-232)communication in LabVIEW[J].Modern Technique and Technologies,2008(9):36-40.
[14]冯毅萍,仲玉芳,曹峥.过程控制工程实验[M].北京:化学工业出版社,2013.
[15]陈浩然.基于Matlab的半实物温度仿真系统的研究与实现[D].沈阳:东北大学,2012.
[16]徐健.基于Labview的温度控制实验教学系统研究与开发[D].长沙:中南大学,2013.
[17]宁德亮,庞凤阁,高璞珍.喷水减温器动态仿真模型的建立及其解法[J].核动力工程,2005(3):280-283,290.
[18]张镐辛,张建民.基于PCS7的半实物仿真系统的实现[J].自动化技术与应用,2014,55(11):62-66.
[19]郑昌瑜.温度控制实验对象装置的设计[D].合肥:合肥工业大学,2008.
[20]陈书立.纯滞后系统控制方法及其实验教学的研究[D].郑州:郑州大学,2009.
Design of Temperature Control System Using Semi-physical Simulation Platform
MA Ping, WANG Kaichen, LI Zijun
(Department of Automation, North China Electric Power University, Baoding 071003, China)
In the process of industrial production, the temperature object of the nonlinear, large delay characteristics and its complex environment,which caused the control structure and the control algorithm studied in the simulator cannot be achieved the expected effect in the practical engineering application.In order to change this situation,this paper presents a hardware-based simulation platform for temperature control system design and research methods.On the platform,the temperature object is the actual electric heating water tank and its pipeline circuit, and the controller is realized by the simulation of Matlab, both through the I/O card connection.The results show that the design and algorithm research of the temperature control system on semi-physical simulation platform has more engineering application value than the research results in the simulation machine.
temperature control; semi-physical simulation; process control; system design
TP273+.5
A
10.3969/j.issn.1672-4550.2017.05.003
2016-02-22;修改日期:2016-04-20
马平(1961-),女,硕士,教授,主要从事过程控制、火电厂单元机组控制和优化、计算机原理及应用方面的研究和教学。
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
电子乐园·下旬刊(2022年5期)2022-05-13
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
文理导航·科普童话(2017年4期)2018-02-10
中国化肥信息(2017年12期)2017-02-10
中学生(2016年13期)2016-12-01
湖南农业(2016年3期)2016-06-05