
高空风力发电机组概念设计研究
2017-11-06 08:40:59闫溟陈广强陈冰雁杨云军周伟江
风能 2017年9期
文 | 闫溟,陈广强,陈冰雁,杨云军,周伟江
高空风力发电机组概念设计研究
文 | 闫溟,陈广强,陈冰雁,杨云军,周伟江
高空风力发电是一种新型的风能利用技术。与传统的水平轴风力发电机组不同,高空风力发电机组不需要高耸的塔架来支撑发电机和风轮,而是利用飞行器或浮空系统来捕获高空当中的风能,从而摆脱了塔架高度的限制,可以捕获到更高高度的风能,充分利用高空风能储量大、风速平稳的特性,因此更具备发电能力高、成本低的优点,极具开发应用前景。
人们从上个世纪八十年代初开始关注高空风力发电技术,发展至今已经提出了若干种设计方案,各方案的设计原理和系统组成都存在巨大差异,但到目前为止该项技术还不成熟,都还处在概念设计或试验阶段,并没有一种方案真正投入工业应用。目前看到的各种方案都还存在一定的不足:有的方案由于控制策略过于复杂,系统不能长时间稳定运行;有的方案由于制造和运维成本过高,不具备经济性;还有的方案由于设计过于超前,目前无法实现等。
为此,还需要针对高空风力发电机组开展设计方案探索,需要基于空气动力学原理,同时结合材料、控制等方面的新兴技术,对高空风能利用方法进行概念创新,设计新的高空风力发电系统,提高风能利用效率并降低发电成本,力求找到一种适合实际应用并具备经济优势的设计方案。本文针对这一需求,提出了一种控制简单、建造较为容易的高空风力发电机组设计方案,并对该方案的风能利用效率进行了计算评估。
总体方案介绍
本文提出的设计方案将发电机置于地面,采用特制风筝作为飞行器捕获高空风能,通过牵引绳索驱动地面系统发电。飞行器以较大攻角上升飞行,牵引绳索带动发电机发电;当到达一定高度后改变姿态向下俯冲,发电机回收绳索,此时需要消耗一些能量;当飞行器下行一定距离后再改变姿态向上爬升,重复发电过程。飞行器俯冲过程消耗的电能远小于爬升过程所发电能,从而整个过程达到发电效果。
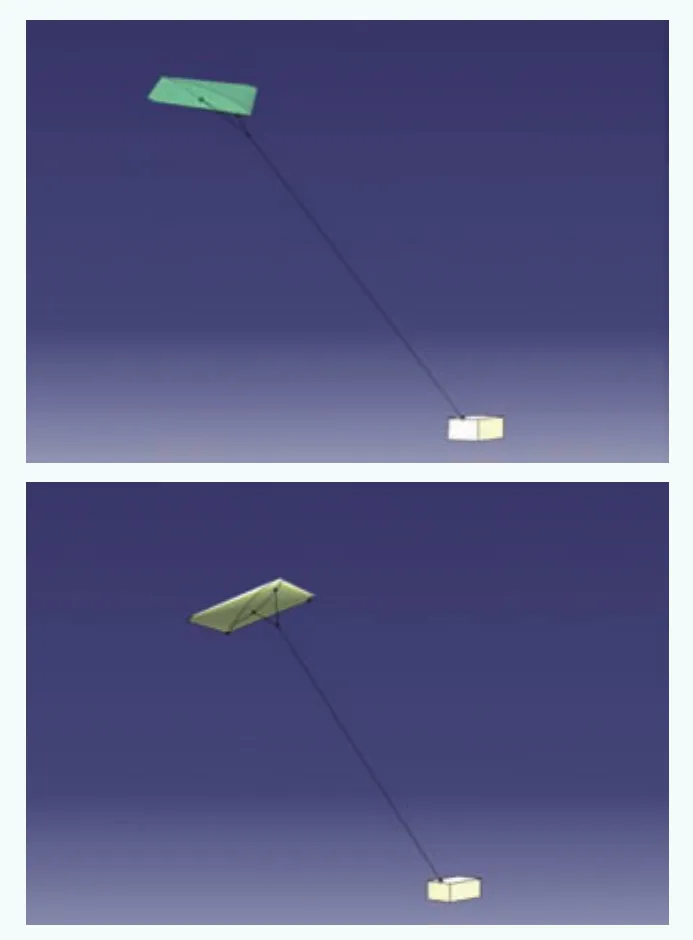
图1 高空风力发电系统总体方案示意图
为了便于控制,同时减少用地和飞行器之间的相互干扰,飞行轨迹为沿直线方向上升,上升到最高点后改变姿态,按照与上升轨迹相反的路径俯冲下来。
对飞行器姿态的控制通过改变与飞行器直接相连的两根绳索的长度来实现:当需要减小飞行器迎角时,回收与飞行器前端相连的绳索,同时释放与飞行器后端相连的绳索;当需要增大飞行器迎角时,执行相反操作,释放与飞行器前端相连的绳索,同时回收与飞行器后端相连的绳索。
飞行器的布局方案采用了飞翼布局,飞翼布局具有高升力、高升阻比、结构强度好等优点,非常适用于高空风力发电机组。整个飞行器呈一个大的菱形,翼展为根部弦长的2倍,根稍比为10。机翼各截面选用同一种翼型,均为EPPLER399翼型,该翼型同样具有高升力、高升阻比特点。同时相对厚度也较大,这样更适于增加整个机翼的结构强度。
飞行器气动性能分析
利用CFD技术,对该布局方案的气动性能进行了评估。计算选用通用流体力学计算软件Fluent完成。计算域选取了一个正方体空间,正方体边长为机翼展长15倍。计算采用了六面体计算网格,总的计算网格单元数为200万左右。
在研究传统飞机的气动性能时所关注的是飞机的升力和阻力,或者是机体坐标系下的轴向力和法向力;而在研究高空风力发电机组的飞行器的气动性能时,需要关注的是轴向力和法向力的合力,也就是飞行器受到的总的气动力,因为飞行器最终将沿着总的气动力的方向运动,发电机的发电或耗电功率为飞行器运动速度与总气动力的乘积。另外一个需要关注的参数为气流方向与总气动力方向之间的夹角,本文中定义为“气力夹角”,用符号β表示,如图3所示。
图4给出了飞行器在不同攻角状态下总的气动力系数CF和β角随攻角的变化情况。随着攻角增大,CF首先迅速增大,在攻角为20度附近达到最大值,此后随着攻角增大,CF有一定振荡。β角随攻角的变化则是先迅速增大,然后再缓慢减小。图5给出了CF随β角的变化情况,可以看出在较大范围内每个β角都对应有两个CF值,一个较大,而另一个则非常小,这两个CF对应的是两个不同的攻角状态。这样就可以控制飞行器的姿态,使其上升飞行时受到的气动力系数为而下降时受到的气动力系数为从而达到较好的发电效果。
风能利用效率评估
飞行器的自身重量以及牵引绳索的重量会对整个系统的风能捕获能力造成一定的影响,为了简化问题,本文首先研究了不考虑以上二者重量的情况。在计算高空风力发电机组的风能利用效率时,采用与传统风力发电机组相类似的方法,定义风能利用系数Cp,形式如下:
其中P*为风电机组捕获风能的平均功率,Pin为风电机组的输入功率,将飞行器的机翼面积S定义为高空风力发电机组的风能捕获面积,则有如下形式:
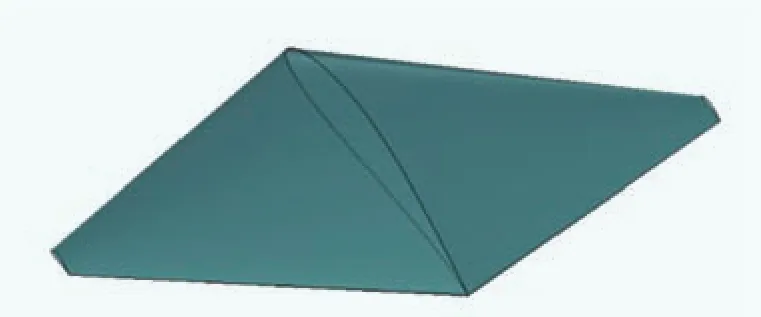
图2 飞行器布局示意图
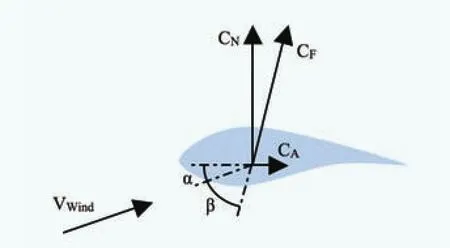
图3 飞行器受力分析图
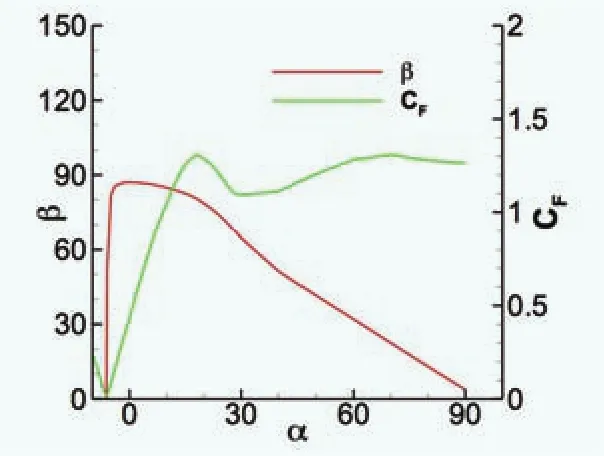
图4 CF和β角随攻角的变化曲线

图5 CF随β角的变化曲线
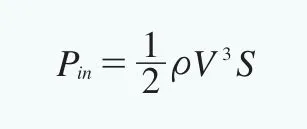
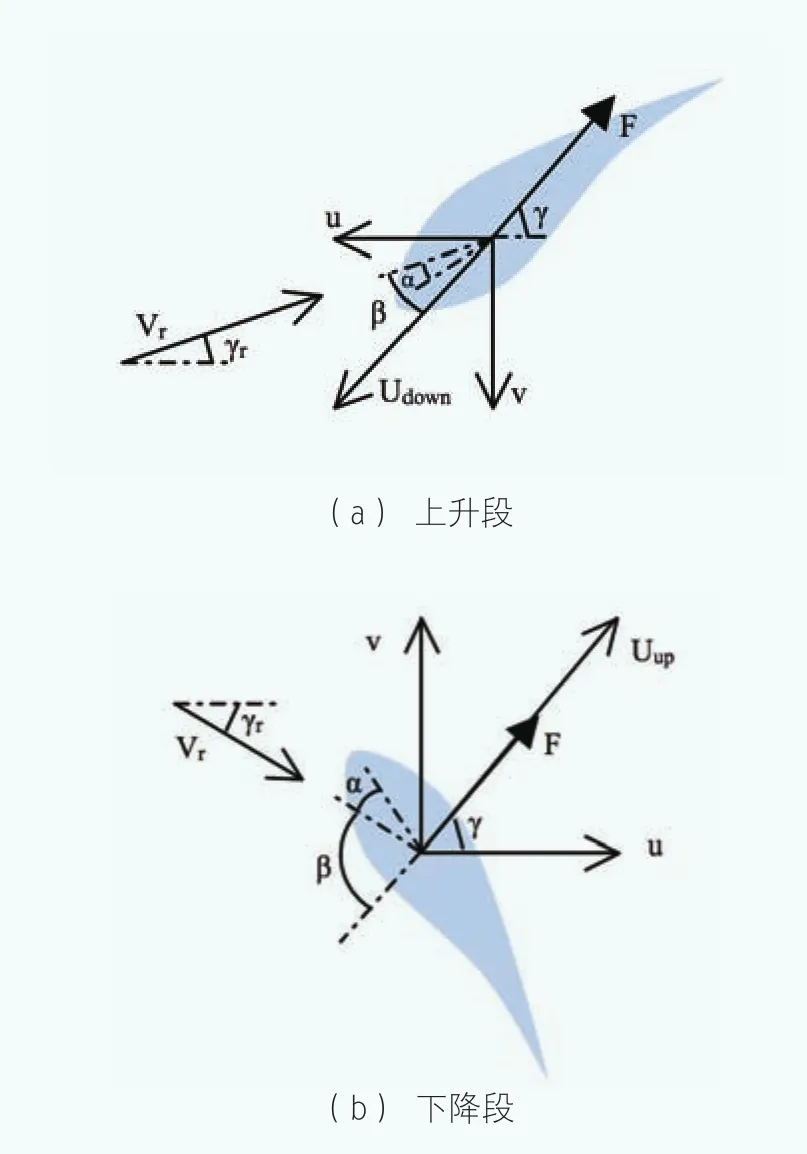
图6 飞行器受力分析图

图7 风能利用系数Cp分布图
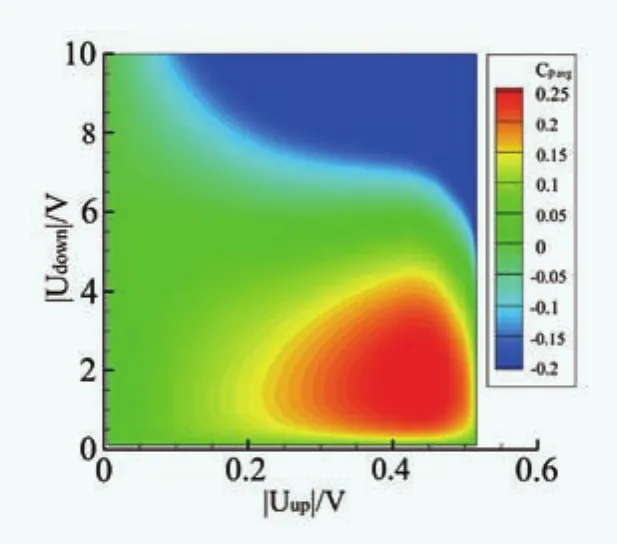
图8 轨迹角为47时的Cp分布云图
其中ρ和V分别为空气的密度和风速。假设飞行器上升或下降过程的直线距离为L,在一个往复周期内,上升段的时长为tup,下降段的时长为tdown。上升段风电机组发电,发电功率为下降段风电机组耗电,耗电功率为则风能利用系数又可以写为如下形式:
图6给出了飞行器在上升时和下降时的受力分析,飞行器的飞行轨迹与地面的夹角称为轨迹角,用γ表示。通过公式推导,可将风能利用系数写成如下形式:

式中,

经过计算,该系统的最大风能利用系数为0.27。图7给出了飞行器以不同的轨迹角、上升速度、下降速度飞行时整个系统风能利用系数的分布情况。当飞行器的飞行轨迹角在45º-50º范围内,上升速度为风速的0.4-0.45倍,下降速度为风速1-2倍时,风能利用系数可以达到0.25以上。图8给出了当轨迹角为47º时,飞行器以不同的上升速度和下降速度飞行时系统的风能利用系数。
结论
本文提出了一种结构和控制都较为简单的高空风力发电机组设计方案,采用特制风筝作为飞行器,沿斜向上的直线路径往复飞行,驱动地面的发电机进行高效发电。为提高气动性能,飞行器采用了具有高升力和高升阻比的飞翼布局和EPPLER399翼型。
采用CFD方法对飞行器的气动力特性进行了计算,结果表明针对每个“气力夹角”都存在两个气动力相差很大的状态,因此通过控制飞行器姿态使其以气动力较大的姿态上升,再以气动力较小的姿态下降,即可使系统在整个往复运动中的总体效果为发电状态。
采用与传统风电机组相似的评估方法,定义了高空风力发电机组的风能利用系数Cp,并分析了飞行器沿各种路径以不同速度上升和下降时的风能利用系数,计算结果表明该方案在很宽的运行范围内都可以获得0.25以上的风能利用系数。
(作者单位:中国航天空气动力技术研究院)
猜你喜欢
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
昆钢科技(2020年4期)2020-10-23 09:31:58
宇航总体技术(2019年5期)2019-10-11 07:32:56
四川冶金(2018年1期)2018-09-25 02:39:28
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
水利技术监督(2017年3期)2017-06-09 06:55:34
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
振动与冲击(2015年2期)2015-05-16 05:37:34
空气动力学学报(2015年3期)2015-04-14 08:42:40
中国铁道科学(2014年1期)2014-06-21 06:34:16
