
基于Maxwell和Simplorer轮毂式SRD分析与研究
2017-11-02 04:44姜保军周林黄大飞
重庆交通大学学报(自然科学版) 2017年10期
姜保军,周林,黄大飞
(1.重庆交通大学 机电与汽车工程学院,重庆 400074;2.中国汽车工程研究院,重庆 401122)
基于Maxwell和Simplorer轮毂式SRD分析与研究
姜保军1,周林1,黄大飞2
(1.重庆交通大学 机电与汽车工程学院,重庆 400074;2.中国汽车工程研究院,重庆 401122)
由于轮毂式开关磁阻电机的结构特性,使得其电磁关系十分复杂,单独的电机本体建模仿真不能较为准确地模拟其实际运行工况。在Maxwell环境下建立轮毂式开关磁阻电机的有限元模型,联合Simplorer软件,搭建功率变换器和控制电路,进行“场-路”的耦合计算,对电机的启动、稳定运行两工况进行仿真分析,得到其运行特性。联合仿真结果比较准确地反映了电机的实际运行情况,为轮毂式开关磁阻电机调速系统的控制和优化提供了参考。
车辆工程;开关磁阻电机;Maxwell;Simplorer;角度位置控制;电流斩波控制
0引言
轮毂式驱动作为电动汽车一种新兴的驱动形式,是未来新能源汽车的重要发展方向。由于这种结构省去了复杂的机械传动装置,使整车设计更加灵活,能量利用率更高,优点显而易见[1]。开关磁阻电机(SRM或SR电机)不但结构简单、成本较低、可靠性高、适用于高速运行,而且有卓越的启动、制动特性[2],因此SRM作为电动汽车的驱动电机具有重要应用价值。但由于SRM的双凸极结构,工作时磁路容易饱和,磁化曲线呈非线性特性,难以建立精确的数学模型,系统控制中也就无法得到较为精确的反馈量。在研究其运行特性的方法中,有限元法对比传统的解析法和等效磁路法更适合解决非线性这类问题。Maxwell软件能很好的利用有限元法计算电机本体的电磁特性。但单独在Maxwell环境下仿真,只是电场的计算,其忽略了较多因素,本质上误差较大。Simplorer软件依靠磁路法来获得电机的特性,是路的计算。Maxwell和Simplorer的联合仿真是“场-路”的耦合计算,更为接近实际控制电路驱动下运行的电机,仿真结果精度更高。笔者首先利用Maxwell 2D平台创建三相12/8极外转子开关磁阻电机模型,并进行动态仿真,得到其动态特性。再利用Simplorer平台搭建其控制系统,其中电机启动运行时采用转速外环PI调节和内环电流斩波控制,电机稳定运行时采用角度位置控制。仿真结果输出的SRM相关特性曲线,能较为准确地反应出电机在控制电路下的特性,能为以后电机的实体设计和控制提供借鉴。
1SRM有限元模型的建立与计算
1.1SRM的结构参数
由于SRM定子绕组上采用集中绕组,转子上无绕组,此种结构具有结构牢固、运行可靠、耐高温等优点,非常适合于电动汽车的应用[3]。根据SRM的定子和转子的不同设计方式,常用的SR电机结构主要有内转子和外转子两种。其中外转子式因为没有减速装置,因此车轮转速与电机转速相同,其转速可在800~1 500 rpm之间。SRM的相数越多,步距角就越小,这能抑制转矩波动。但相数增多,定、转子的磁极数就会增多,使SRM结构变复杂,增多功率变换器的主要开关元件数,使其成本增加。笔者根据电动汽车轮毂式驱动系统的要求,釆用三相外转子结构,定子12极、转子8极,其结构如图1,优化后的电机结构参数见表1。
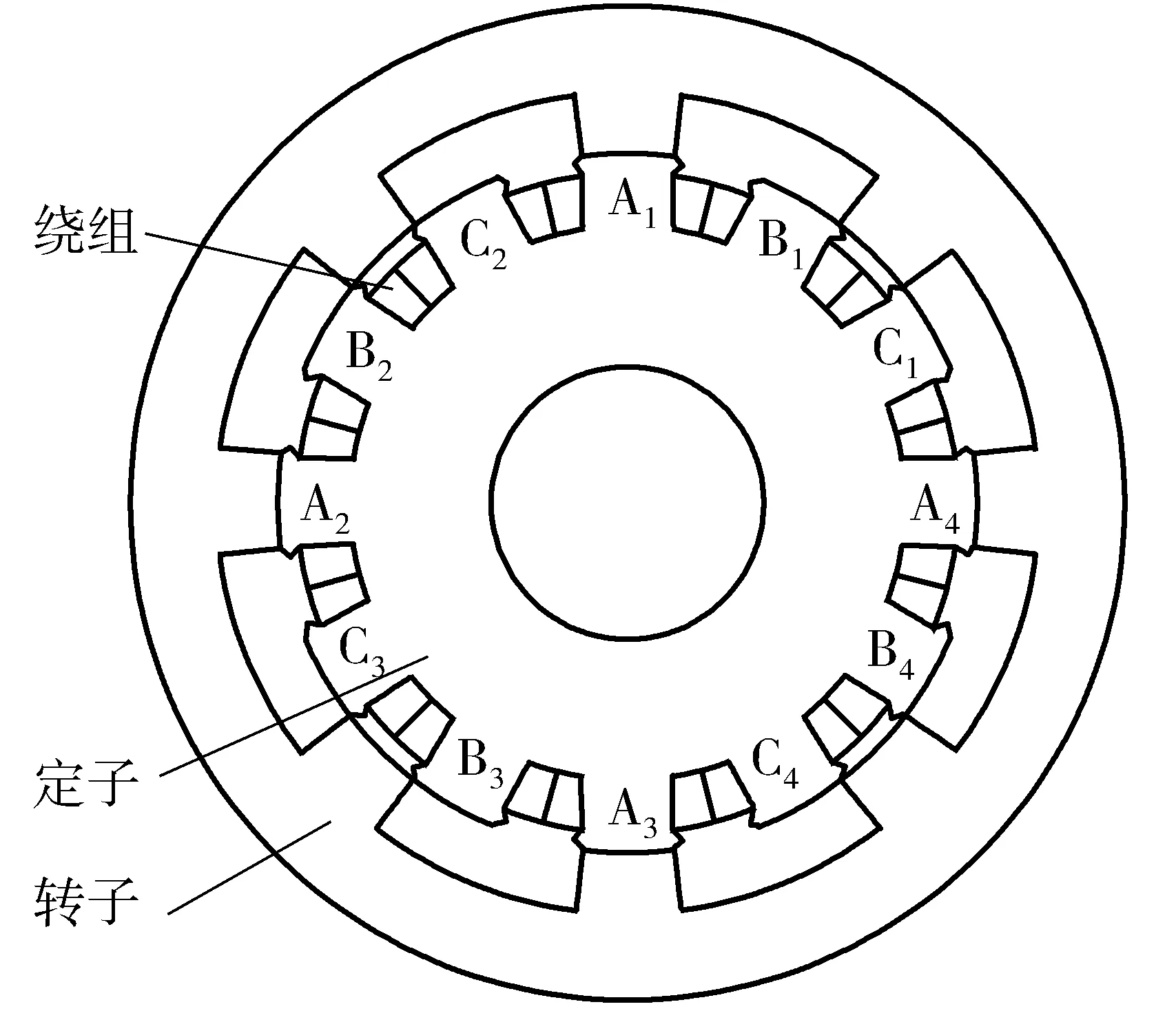
图1三相12/8极外转子开关磁阻电机结构Fig.1Structure of three-phase external rotor 12/8 switched reluctance motor
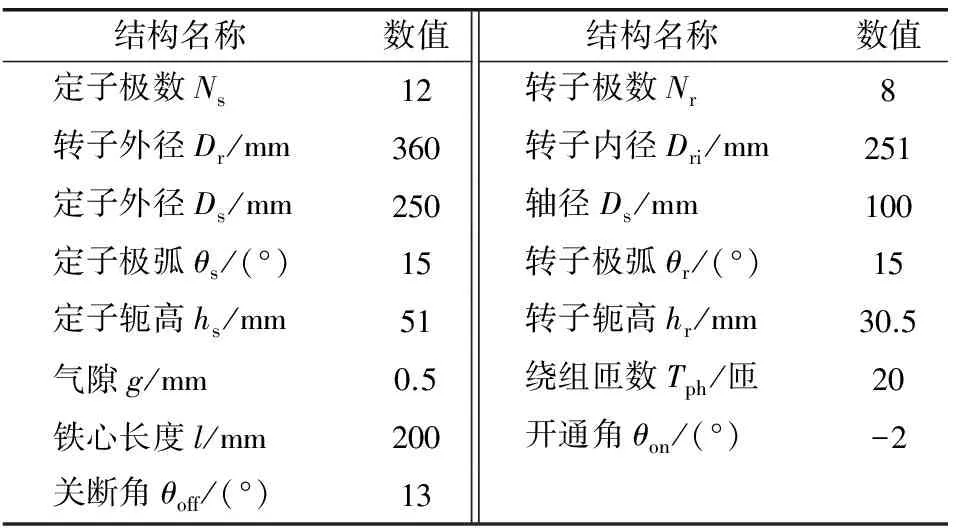
表1电机结构参数Table 1Structural parameters of the motor
1.2SRM的有限元计算
由于SRM在工作期间,磁路非常容易饱和,这不但使系统有很强的非线性(磁链对转子位置角和相电流的非线性),而且不同转子位置下对应有不同的磁化曲线。因此传统的电磁场计算方法对其求解变得困难。而有限元法相较传统方法更利于解决非线性这类问题——其能使复杂结构、复杂边界的定解问题的求解变得容易。
Ansoft Maxwell是一款功能完善、计算精确、使用便捷的二维电磁场有限元分析软件[4]。在Maxwell平台下,利用导入CAD格式的定、转子冲片的方法,建立好外转子SRM模型,在不搭建功率变换器的情况下,进行初步动态仿真分析。图2是SRM的外转子在不同位置时的磁力线分布,图3是SRM动态特性下的不同励磁电流对应的转矩特性曲线。
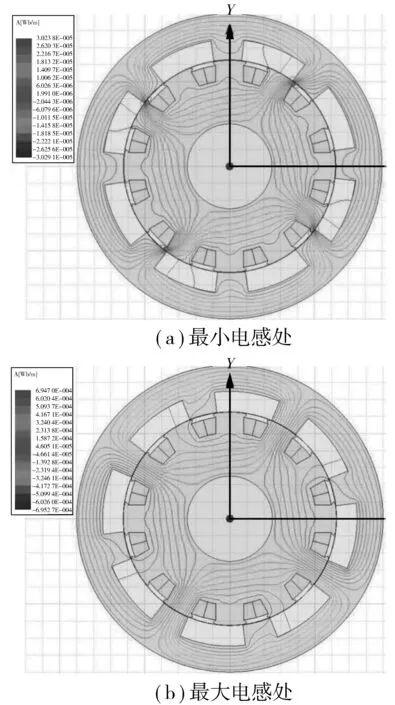
图2磁力线分布Fig.2Distribution of magnetic lines

图3转矩特性曲线Fig.3Torque characteristic curve
2SRD联合仿真
2.1SRM的控制方式
开关磁阻电机调速系统(SRD)主要由SRM本体、功率变换器、控制器、位置检测器、电流检测器5部分组成,如图4。
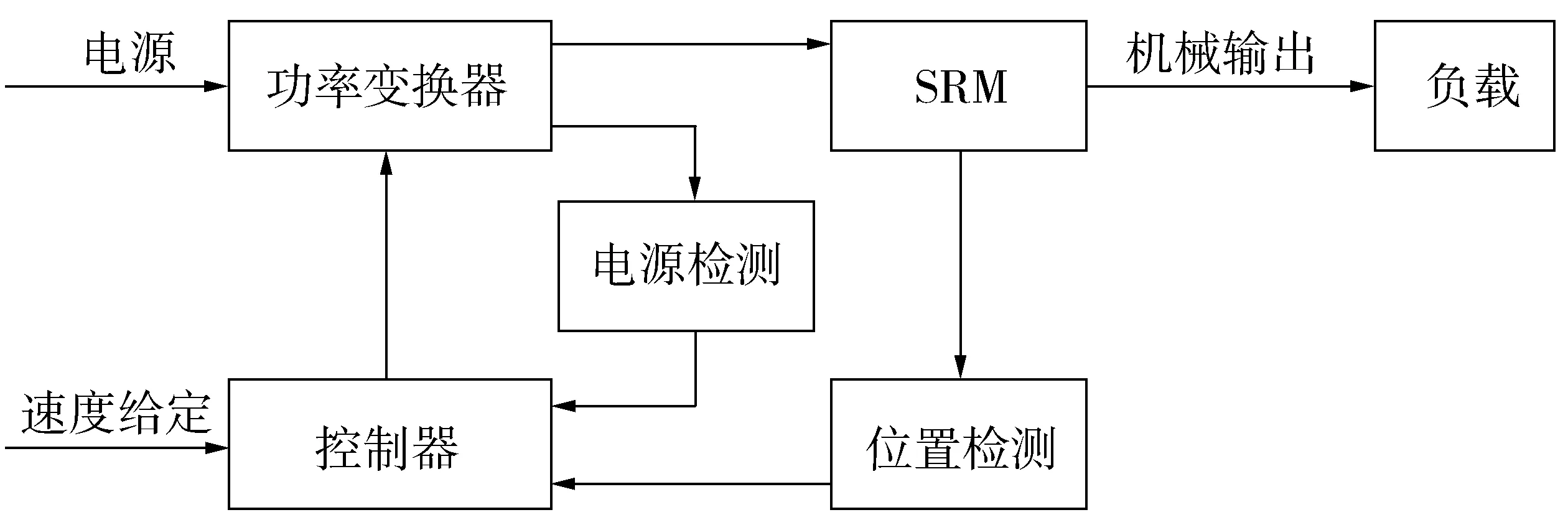
图4开关磁阻电机调速系统Fig.4Speed regulating system of the switched reluctance motor
SRD的可控变量有相电压Uk、相电流ik、开通角θon、关断角θoff等参数。针对以上的可控变量的控制方式一般分为3种,即角度位置控制方式(APC)、电流斩波控制方式(CCC)和电压斩波控制方式(CVC)[5]。
当SRM以低速特别是启动工况运行时,反电动势的压降小,会使绕组相电流迅速增大。为了防止过大的电流脉冲烧坏功率变化器的开关器件或电机本体,需要限定相电流峰值。因此,可采用电流斩波控制,获取恒转矩的机械特性。
图5为电流斩波波形,当转子位置角θ处于电流导通区域时,若相电流i小于电流斩波限ichop,则主开关开通,相电流上升直至斩波上限Imax;若相电流i大于电流斩波限ichop,则主开关关断,相电流下降至斩波下限Imin;如此循环,相电流将维持在斩波限附近,并伴有较小波动。
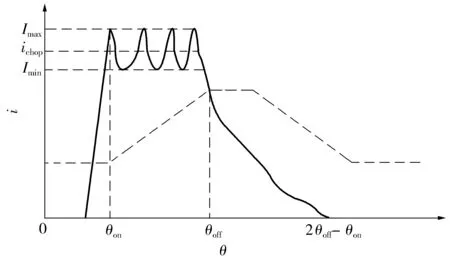
图5电流斩波波形Fig.5Current chopped wave
SRM在稳定或者高速运行时,当稳定绕组端的电压情况下,改变绕组上的主开关的开通角θon、关断角θoff,来改变绕组的通电、断电时刻,调节相电流的波形,达到转速闭环控制。
笔者在Maxwell和Simplorer的仿真环境下,模拟SRM从启动到稳定运转的工况,主要用到的控制方式有角度位置控制方式、电流斩波控制方式。
2.2功率变换器电路搭建
Simplorer是一款多领域机电系统设计和仿真分析软件,电机仿真结果更加接近其实际运行工况,能够准确的反应其运行特性。在电机仿真中,Simplorer是基于磁路法来计算电机的性能,是路的计算;Maxwell是利用有限元法计算电机本体的电磁性能,是场的计算。Simplorer主要是用来搭建电机的控制电路,其中控制电路是主体核心,电机只是一个受控元器件;Maxwell中电机作为一个独立的主体部分,采用有限元法对电机的电磁性能详细的进行仿真模拟。两款软件实现联合仿真,实际上是“场-路”耦合计算的机理,在实际控制电路驱动下运行的电机,仿真出的结果精度更高。
根据SRM基本工作原理可知,其功率变换器的不但起到开关作用,还能为SRM提供电能量,同时为绕组的储能提供回馈路径。由于轮毂电机具有高压大功率的特性,功率变换器一般采用不对称半桥结构。这种结构能提供各相间的完全独立控制,主开关器件的电压容量要求较低,且控制简单。
在Simplorer环境下构造好功率变换器系统电路,其中开关管选用IGBT,续流二极管直接选取二极管模块,并将这些模块元件与导入的SRM有限元模型对接。连接好后的电路拓扑结构如图6。
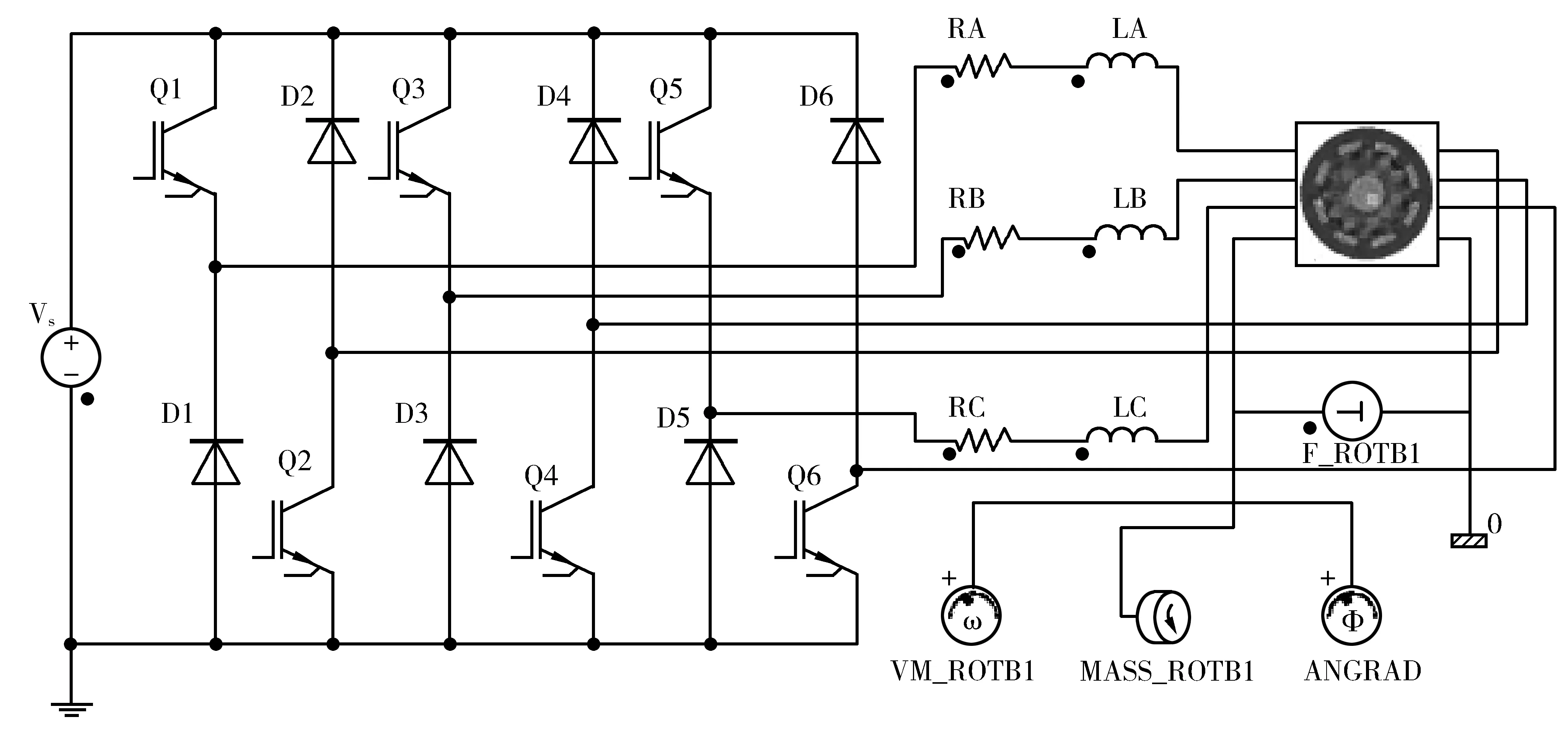
图6功率变换器电路Fig.6Power converter circuit
2.3SRM启动控制模型
SRM工作是在功率变换器中IGBT有规律的通断下进行的。因此针对SRM的控制,主要是针对IGBT通断逻辑的控制。SRM启动工况仿真时,对SRM的控制主要是内环电流斩波控制和外环转速PI控制。
PI控制是在长期的工程实践中总结出来的一套控制方法,其控制结构简单,参数调整方便,已经成为系统控制理论中技术最成熟、应用最广泛的一种控制技术[6]。
同时,由于运转过程中SRM的高度非线性,使系统整体控制性能分析变得困难。小信号的扰动可局部线性化SRM的非线性特性,降低运算难度[7]。根据小信号模型建立的SRD的控制框图如图7。
由于外环PID控制的传递函数:
GC(s)=kp+ki/s+kds

图7SRD控制框图Fig.7Block diagram of SRD control
则系统的开环传递函数G(s)=GC(s)GP(s)为

式中:i0为稳态电流;L为任意转子位置角θ对应的相电感。该传递函数是设计外环PID控制器所必的[8]。
在Simplorer环境下,根据控制框图搭建外环转速PI控制和内环电流斩波控制模型如图8。
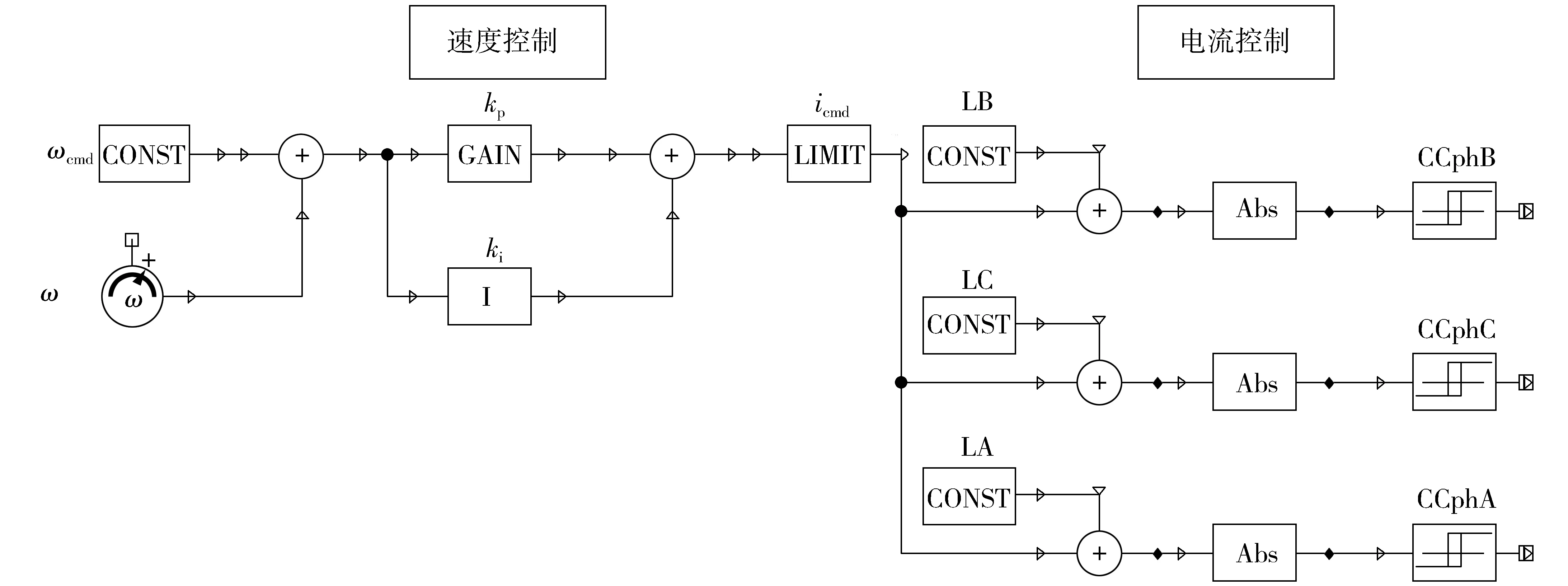
图8双闭环控制模型Fig.8Control model of double closed loop
通过将SRM实际转速信号ω和给定转速信号ωcmd进行比较,从而产生速度偏差信号e。该偏差信号经外环PI调节,输出参考电流icmd作为电流环的输入信号,将其与相电流信号LA/LB/LC进行比较所得的电流值经由电流滞环比较器进行限幅,从而实现电流斩波控制。
同时在PI控制中,系统要得到预期效果往往取决于对各控制参数的选择。kp值小易产生偏移,值大会引起振荡;ki值过大也会使系统振荡、不稳定。不同的运行阶段,kp、ki的取值也有不同的要求。因此,PI参数可以用位置或转速的误差e函数表示:


由上两式可以看出,kp、ki能在一定的范围内随系统输入误差e的变化作出即时调整,更好地满足系统的动态控制要求[9]。
2.4SRM稳定控制模型
SRM启动后,为了让SRM运行平稳,要确定换相电流的通断顺序及每相的通断时间,这时用到的主要控制方式是角度位置控制(APC)。
对IGBT的通断控制是建立在Simplorer平台的状态机模块上,如图9。笔者的SRM是三相电机,功率电路采用单相导通,三相导通顺序为B-C-A-B,各相导通相差15°,周期为45°。在单个周期内,一个通断循环可以被分为6个状态,每相包括接通与否两个状态。期中一个状态一直处于激活状态(a_on),直到转子通过关断角位置(a_off)才关断。
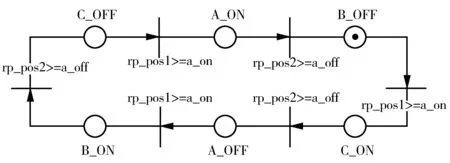
图9位置控制模型Fig.9Position control model
3启动和稳态工况仿真分析
按上述方法完成模型搭建后,进行SRM启动工况仿真。为了不使绕组启动电流限值过小以保证轮毂能顺利启动,电流斩波法设置的斩波电流对应的转矩应大于电动车启动所需转矩。根据电动车启动所受的行驶阻力(包括滚动阻力、加速阻力、空气阻力),设置电机所带负载,内环电流斩波控制中电流斩波设置为上斩90A,下斩70A,直到电机进入稳定运行停止。仿真后得到SRM相电流曲线、转速曲线、输出转矩曲线,如图10~图12。
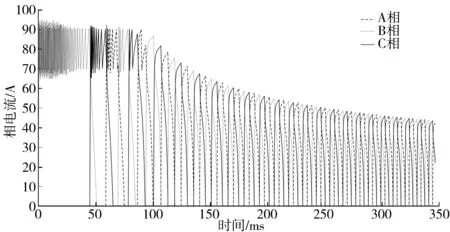
图10相电流曲线Fig.10Phase current curve
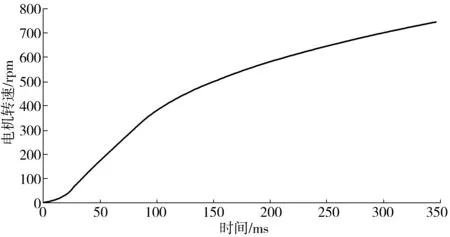
图11转速曲线Fig.11Rotating speed curve

图12输出转矩曲线Fig.12Output torque curve
从图10可以看出,在启动时由于斩波上限设置较低,则电机的励磁电流偏低,转子转动较为缓慢,B相电流持续了较长时间才换相到下一相。如将斩波上限设置较高,则启动状态的转矩与稳定状态的转矩落差会加大,转矩波动也更为剧烈,这不利于SRM的稳定运行。
SRM进行稳定工况模拟仿真时,由于外转子式轮毂电机没有减速装置,车轮转速与电机转速相同,因此设定稳定转速为800 rpm。得到电机的IGBT通断信号曲线、相电流曲线和输出转矩曲线,如图13~图15。

图14相电流曲线Fig.14Phase current curve

图15输出转矩曲线Fig.15 Output torque curve
从图14可知,在SRM稳定运行时的电流峰值为40 A,与斩波法稳定后的峰值电流非常接近;图15所示的输出转矩曲线也与图12后半部位达到稳定的输出转矩接近,这间接验证了启动工况的准确性。
从图15可知,SRM稳定工况的转矩脉动为30~100 N·m,波动较大,同时谐波含量较多。这可能和此时的通电方式为单相通电有关。SRM的通电方式对电机的特性影响较大,常用的通电方式有单相通电和双相通电。单相通电是通过位置信号确定定转子间的相对位置和各相所处电感曲线的位置以确定通电绕组。单相通电电机容易出现无法起动或出现振荡现象。双相通电方式是根据定转子位置对处于电感上升区的所有绕组同时通电,选择合适的通电组合可实现最小转矩达到单相的峰值转矩,有效提高了电机的起动性能。对SRM电机采用双相通电方式,输出转矩曲线如图16。
从图16可以看到,采用双相通电的SRM不但平均转矩有较大提高,而且转矩波动有明显减小。
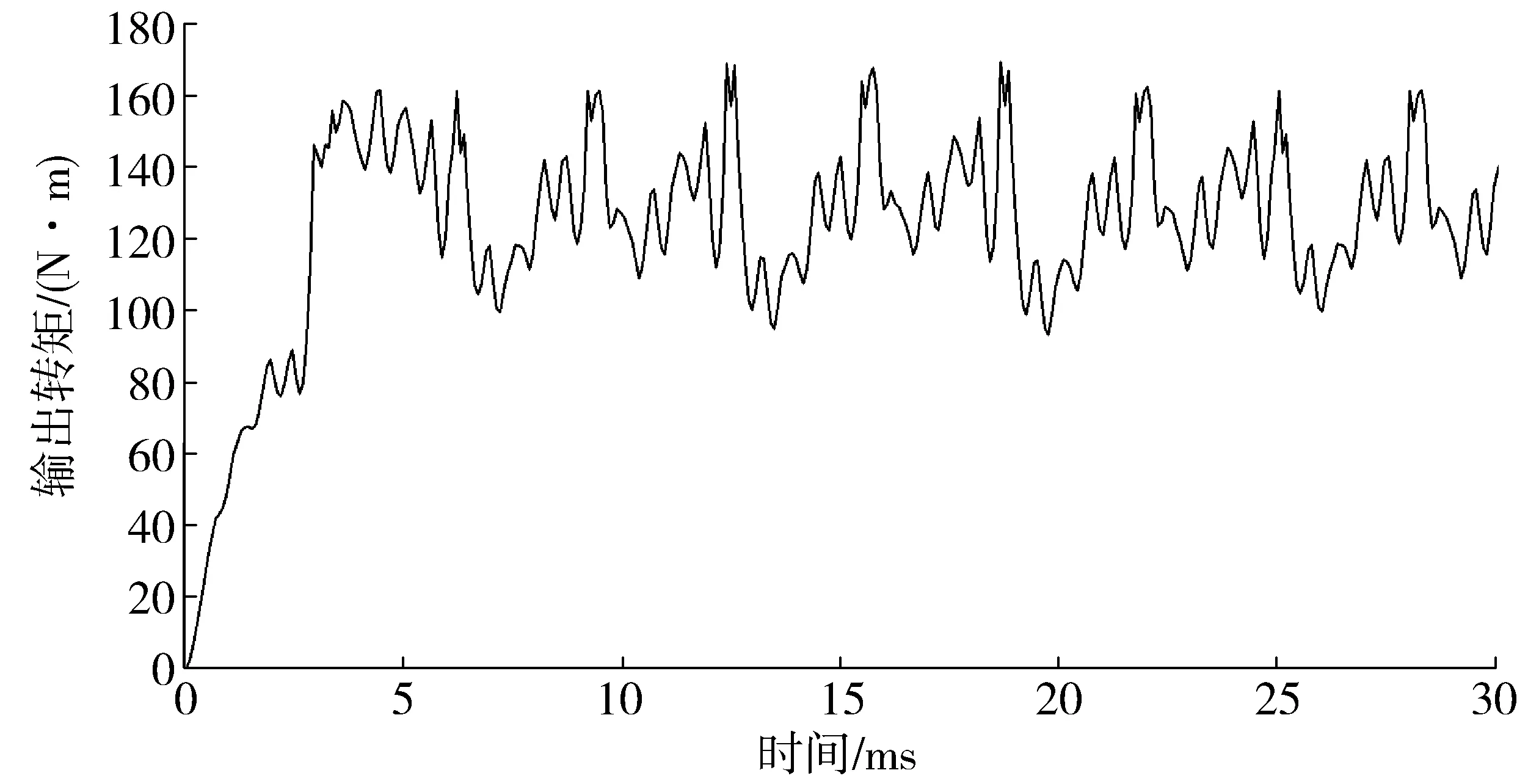
图16双相导通输出转矩曲线Fig.16 Two-phase output torque curve
4结语
笔者利用电磁场分析软件Maxwell和磁路计算软件Simplorer,对轮毂式外转子开关磁阻电机进行联合仿真分析。仿真结果较为准确地反应了在启动和稳定运行两种工况下开关磁阻电机各相相电流的走势和输出转矩特性。在模拟仿真SRM启动工况时,如果电流斩波法设置的斩波上限大,斩波区间较宽,会使电机输出转矩波动增大,不利于电机运行;但此时电机进入稳定运行的时间相对较短,电机启动迅速,此种工况下的控制还有进一步优化的空间。
[1] 李元东.电动汽车用轮毂式开关磁阻电机及驱动系统研究[D].山东:山东大学,2014.
LI Yuandong.TheStudyofIn-WheelSwitchedReluctanceMotorandDrivingSystemBasedonUseofElectiveVehicle[D].Shandong: Shandong University,2014.
[2] 闫大伟,陈世元.电动汽车驱动电机性能比较[J].汽车电器,2004(2):4-6.
YAN Dawei,CHEN Shiyuan.Performance compare of driving motors on EV[J].Auto Electric Parts,2004(2): 4-6.
[3] 吴建华.电机开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
WU Jianhua.SwitchedReluctanceMotorDesignandApplication[M].Beijing: China Machine Press,2000.
[4] 刘国强,赵凌志,蒋继娅.Ansoft工程电磁场有限元分析[M].北京:电子工业出版社,2006.
LIU Guoqiang,ZHAO Lingzhi,JIANG Jiya.FiniteElementAnalysisofProjectofAnsoftElectromagneticField[M].Beijing: Electronic Industry Press,2006.
[5] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
WU Hongxing.SwitchedReluctanceMotorSystemTheoryandControlTechnology[M].Beijing: China Electric Power Press,2010.
[6] 夏长亮,王超明.基于RBF神经网络的开关磁阻电机单神经元PID控制[J].中国电机工程学报,2005,25(15):161-165.
XIA Changliang,WANG Chaoming.Single neuron PID control for switched Reluctance motors based on RBF neural network[J].ProceedingsoftheChineseSocietyforElectricalEngineering,2005,25(15): 161-165.
[7] HOSSAIN S A.ModelingandFourQuadrantControlofASensorlessSwitchedReluctanceMotorDrivenActuatorSystem[D].Akron,USA: University of Akron,2002.
[8] 梁得亮,丁文,程竹平.基于Simplorer的三相开关磁阻起动/发电系统建模研究[J].西安交通大学学报,2007,41(10):1210-1213.
LIANG Deliang,DING Wen,CHENG Zhuping.Modeling for three-phase switched reluctance starter/generator system[J].Journal of Xian Jiaotong University,2007,41(10):1210-1213.
[9] DING Wen,LIANG Deliang,CHENG Zhuping.Dynamic model and simulation for a 6/4 switched reluctance machine system assisted by maxwell spice and simplorer[C]//Proceedingsofthe2007IEEEInternationalConferenceonMechatronicsandAutomation. New York,US: IEEE,2007:1699-1704.
(责任编辑:谭绪凯)
Analysis and Research of In-wheel SRD Based on Maxwell and Simplorer
JIANG Baojun1,ZHOU Lin1,HUANG Dafei2
(1.School of Electromechanical & Automotive Engineering,Chongqing Jiaotong University,Chongqing 400074,P. R. China;2.China Automotive Engineering Research Institute,Chongqing 401122,P. R. China)
Due to the structure characteristics of in-wheel switched reluctance motor,its electromotive relationship was quite complex.Modeling and simulation of individual motors could not simulate their actual operation conditions accurately.Therefore,finite element model of in-wheel switched reluctance motor was established at Maxwell environment,and then power converter and control circuits were also established to run “filed-path” coupled calculations,combining with Simplorer software.Simulation analysis on two working conditions of starting and steady running of motor was carried out,and its operation characteristics were obtained.The results of the combined simulation accurately reflect the motor’s actual operation situation,which provides reference to control and optimize the speed regulating system of in-wheel switched reluctance motor.
vehicle engineering; switched reluctance motor; Maxwell; Simplorer; angular position control; current chopping control
U469.72;TM352
A
1674-0696(2017)10-112-06
2016-05-21;
2017-01-16
姜保军(1965—),男,黑龙江绥化人,博士,副教授,主要从事电机驱动与控制及电机驱动系统电磁兼容方面的研究。E-mail:jiang031@163.com。
周林(1990—),男,四川遂宁人,硕士,主要从事新能源汽车开关磁阻电机方面的研究。E-mail:519464718l@qq.com。
10.3969/j.issn.1674-0696.2017.10.19
猜你喜欢
大电机技术(2022年5期)2022-11-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年2期)2022-04-26
微电机(2022年1期)2022-03-21
防爆电机(2021年4期)2021-07-28
电子制作(2018年19期)2018-11-14
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年1期)2016-04-12
客车技术与研究(2015年3期)2015-08-24
微特电机(2015年1期)2015-07-09
