舵机加载试验系统设计与实现
2017-11-02 01:54:56李倩吴亮田建升
航空科学技术 2017年12期
李倩,吴亮,田建升
西安飞豹科技有限公司,陕西 西安 710089
电动舵机作为飞行控制系统至关重要的执行机构,其性能特性以及与飞控系统综合后所呈现的性能对飞机飞行品质具有重要影响。实际飞行过程中,受气流作用影响,飞机舵面存在复杂的铰接力矩,为测试舵机系统在铰接力矩作用下的性能,需研制专用地面半实物仿真设备,以完成舵机装机前的性能检查。
在地面试验中,铰接力矩由加载系统模拟实现,由电机给被测舵机提供可控力矩,再由旋转编码器与扭矩传感器实时检测反馈舵机状态,通过分析舵机运动参数,从而判定舵机性能指标。因此,能否精确的加载是衡量加载系统性能优劣的关键指标,研究加载系统控制算法具有重要的意义。
本文所设计舵机加载系统采用PXI总线作为基础硬件平台,结合虚拟仪器、模块化设计、面向对象等方法进行软硬件设计与实现。通过建立加载系统数学模型,利用Simulink进行建模仿真,对不同控制算法下的性能反馈进行了分析比较,从而验证了系统设计的可行性及有效性。
1 系统构成
舵机加载系统主要由负载模拟器、被测舵机、舵机驱动系统以及控制算法等构成。其中,被测舵机及舵机驱动系统属于被测试的部分,是现成的试验件,所以只需要对负载模拟器和控制算法进行设计。
1.1 负载模拟器
负载模拟器为舵机加载系统核心设备,其主要功能为:当试验台计算机发出负载设定指令时,由负载模拟器向产品机构施加对应模拟载荷。负载模拟器组成如图1所示。
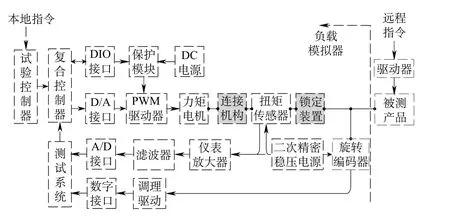
图1 负载模拟器组成Fig.1 Composition of load simulator
负载模拟器在试验过程中实现载荷模拟、测量反馈、参数计算及调整、安全保护等功能。
被测舵机与负载模拟器在安装台面上的连接关系如图2所示。

图2 负载模拟器与舵机的安装连接Fig.2 Installation and connection of load simulator and steering gear
为确保测试系统的安全与可靠,安装时注意连接轴杆的同轴度、间隙以及刚度等问题,本系统采用三维制图软件对结构件进行了配合设计,并对传动轴强度及连杆的压杆稳定性等进行了理论分析与验证,以确保系统的可靠运行。
1.2 控制算法
由于电动伺服系统及现场存在非线性、时变性等不确定因素,故常规PID无法满足预期控制精度。模糊控制作为一种非线性控制,将模糊控制思想和常规PID控制算法相结合,以实现高精度的控制效果。当所控系统误差偏大时,模糊控制能够实现快速响应,且动态性能优良[1]。
模糊控制工作原理为:首先由测量变送装置获取被控量的实时参数,经转换和处理后反馈回当前被测量的精确值,给定控制量与测量变送装置的反馈值做差值运算,得到系统偏差量,将偏差量送入模糊控制器,经过模糊运算处理后,再将控制量输出给执行机构,以实现精确控制。
为解决系统对某一频率控制效果良好的PID参数在系统频率改变后会造成系统响应衰减的状况,可采用模糊PID控制算法给予及时修正和补偿。
本系统模糊算法中,以系统误差e和误差变化ec作为输入,以PID控制器的参数增量Kp、Ki、Kd作为输出,所构建系统模糊PID控制结构如图3所示。
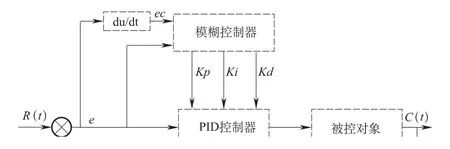
图3 模糊PID控制结构图Fig.3 The control structure diagram of fuzzy PID
在总结专家经验的基础上,结合模糊规则的完整性、干涉性以及相容性等要求,建立Kp、Ki、Kd模糊规则表用于仿真模型中模糊控制规则的建立。
2 数学建模
在实际工作过程中,负载模拟器输入来自软件设定的模拟载荷,将负载模拟器视为理想情况下的线性连续系统进行建模分析。当实际载荷与设定载荷存在偏差时,复合控制器将对偏差做算法解算,再通过D/A接口输出一定控制量由PWM驱动后使力矩电机进行载荷调整。
2.1 模型依据
加载系统输出为力矩,转速通常较低。为保证较高加载精度及较快响应速度,选用力矩电机配合齿轮减速器驱动负载,能够放大电机输出力矩,从而保证系统足够大的力矩模拟[2]。直流力矩电机的电压平衡方程式为:

电枢感应电动势em1为:

直流力矩电机转矩平衡方程式为:
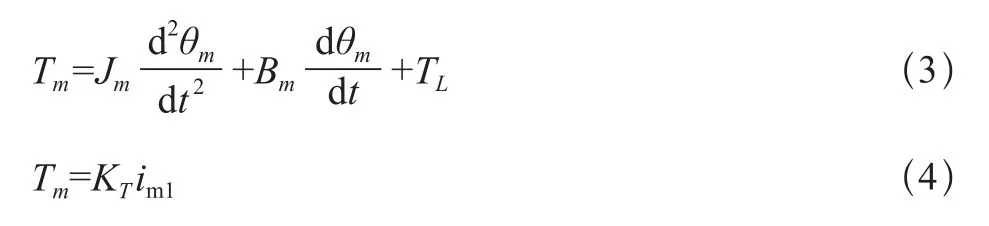
式中:Ud为电机电枢电压;im1为电机电枢电流;ωm为电机转动角速度;Tm为电机电磁转矩;KT为电磁转矩常数;Bm为电机黏性阻力系数;Lm1为电机电枢回路总电感;Rm1为电机电枢回路总电阻;Ke1为反电动势系数;θm为电机转动角位移;Jm为转动部分转动惯量;TL为电机输出转矩。
对式(1)~式(4)进行拉氏变换,可得直流力矩电机动态结构图,再结合电机驱动、载荷传感器、反馈比较环节数学模型,可得负载模拟器系统结构图,如图4所示。

图4 负载模拟器系统结构图Fig.4 Structure of load simulator system
根据上述结构框图可得系统传递函数为:

由式(5)及负载模拟器系统结构图可知,加载系统输出力矩受两部分影响:一是计算机控制输入载荷谱或输入力矩;二是电动舵机角位置的θr作用,其将导致干扰力矩G2(s)θr(s)的产生,该部分所产生输出力矩即为多余力矩。多余力矩对系统整体而言是强干扰项,因此,需采取控制措施对其进行抑制或补偿。
2.2 干扰补偿
采用前馈校正的方法对系统性能进行校正。前馈校正是专门针对外部扰动施加的控制信号,且是预先施加的控制信号,可以有效减小外部扰动带来的影响[3]。按扰动补偿的前馈校正控制系统结构如图5所示。
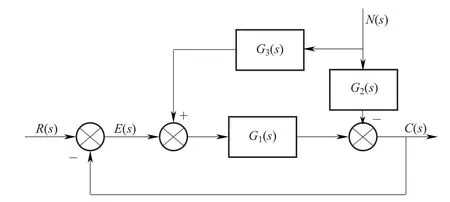
图5 前馈校正控制系统结构图Fig.5 Structure of feedforward correction control system
图5中,R(s)为系统控制输入量;C(s)为系统输出量;E(s)为系统误差;N(s)为系统可测干扰量;G1(s)为正向通道传递函数;G2(s)为干扰通道传递函数;G3(s)为针对干扰量设计的前馈校正装置传递函数。前馈校正的目的是通过G3(s)的补偿作用,使干扰通道与前馈控制通道的作用正负相消,从而达到消除扰动影响的效果。
根据前馈校正补偿原理,系统干扰量为可用传感器实时量测的舵机角速度,从干扰输入端引入前馈补偿装置GR(s)后,可得系统的输出载荷TL可表示为:

3 建模仿真
3.1 前馈自适应PID
经前馈自适应PID校正后,加载系统仿真模型如图6所示。图6中,Sine Wave1为系统输入控制量;Sine Wave2为系统干扰量;PID Controller为PID控制器;Transfer Fcn1为系统前向通道传递函数;Transfer Fcn2为系统干扰通道传递函数。
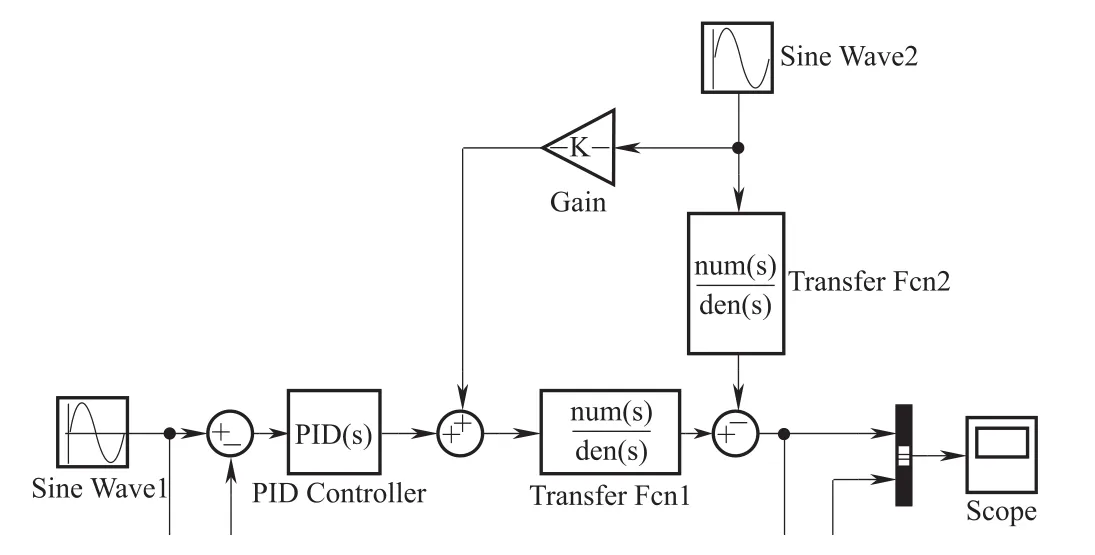
图6 加载系统PID+前馈校正仿真模型Fig.6 The simulation model of PID and feedforward of loading system
3.2 前馈自适应模糊PID
根据电动舵机加载系统输入控制量与传感器实时反馈量作差,以所得偏差e和误差变化ec为两输入变量的模糊二自由度控制算法构建系统模糊PID控制器仿真模型,如图7所示。图7中,ke、kec分别表示e、ec的量化因子;k1、k2、k3分别表示模糊PID控制器输出量kp、ki、kd的模糊运算比例因子;kp0、ki0、kd0分别表示模糊PID控制器输出量初始参考值。

图7 加载系统模糊PID+前馈校正仿真模型Fig.7 The simulation model of fuzzy PID and feedforward of loading system
4 仿真分析
设定系统输入载荷谱为TR=60.209sin(62.832t)N·m,干扰输入量为θr=1.75sin(62.832t)rad/s。绘出系统输入、未校正前系统输出、PID校正后系统输出以及模糊PID校正后系统输出曲线,如图8所示。
图8中,虚线为旋转式加载系统输入载荷谱曲线,短划线为未加入任何校正补偿装置时系统输出载荷曲线,图8(a)实线为系统经前馈自适应PID校正后输出载荷曲线,图8(b)实线为系统经前馈自适应模糊PID校正后输出载荷曲线,得出曲线参数见表1。
通过仿真效果对比可知,前馈补偿器可较好地抑制系统干扰载荷,模糊PID控制算法较常规PID而言,系统输出跟随输入能力增强,滞后减小,且系统非线性得到抑制,采用前馈自适应模糊PID使得输出力矩在一定范围内准确跟随系统输入,具有较优的控制效果。
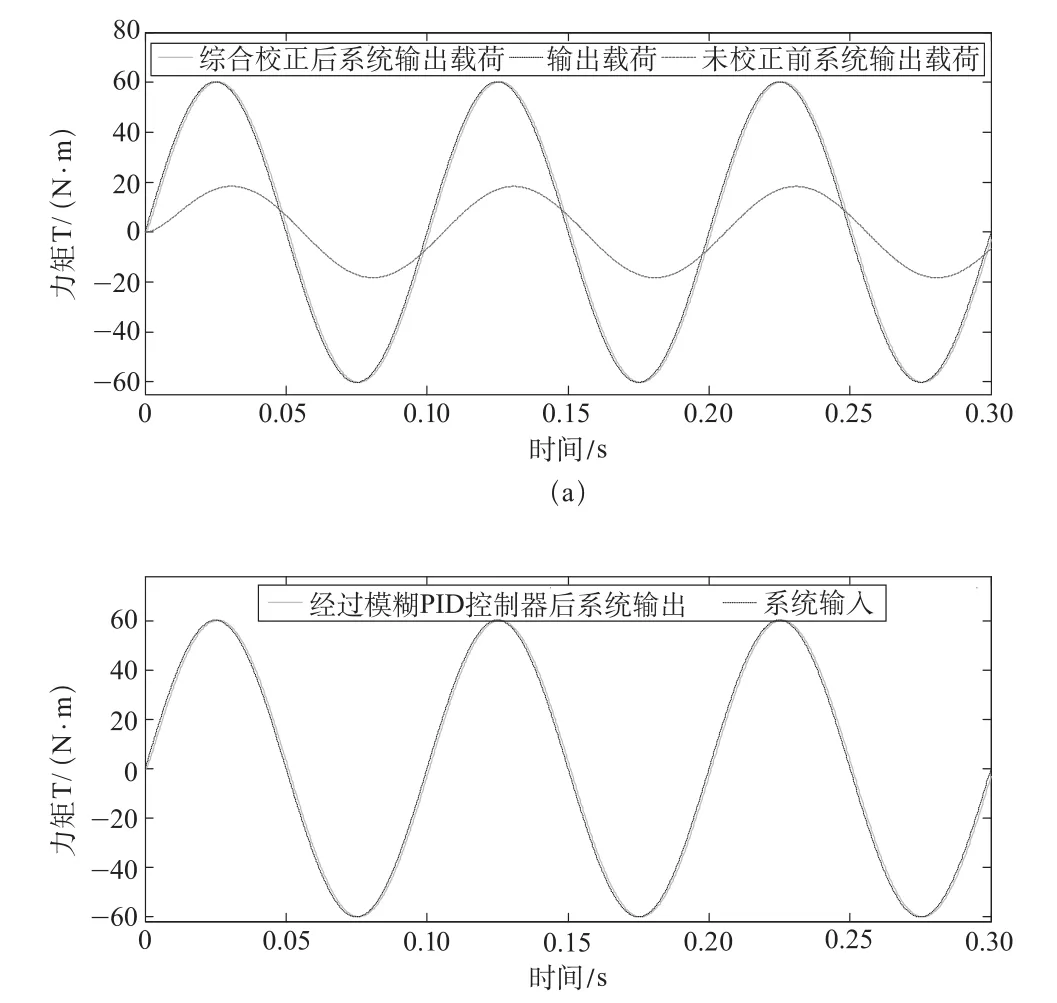
图8 仿真结果曲线图Fig.8 The curve chart of simulation result
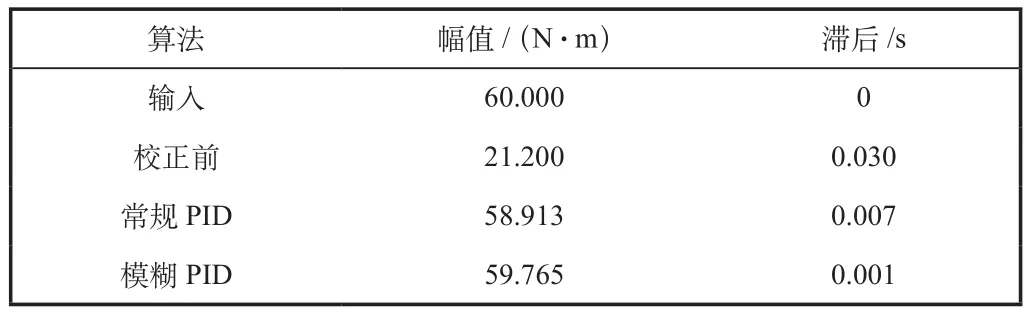
表1 校正效果对照表Table1 The table of correction effect
5 结束语
为满足舵机地面加载测试试验需求,搭建了基于计算机测控技术的综合测试平台,并利用Simulink对设计中的控制算法进行了建模仿真。对被动加载中存在的多余力矩采取了前馈补偿的方式予以抑制和消除,通过对常规PID与模糊PID控制效果的比较,可知模糊控制算法更优。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
自动化学报(2019年6期)2019-07-23 01:18:36
测控技术(2018年7期)2018-12-09 08:58:46
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
光学精密工程(2016年4期)2016-11-07 09:05:39
装备环境工程(2015年5期)2015-02-28 01:20:24
舰船科学技术(2015年8期)2015-02-27 15:38:46