航道视频监控与船舶AIS动态数据在航道行政执法中的应用
2017-11-01 12:32:35杨建乐
福建交通科技 2017年5期
■杨建乐
(湄洲湾港口管理局,泉州 362001)
航道视频监控与船舶AIS动态数据在航道行政执法中的应用
■杨建乐
(湄洲湾港口管理局,泉州 362001)
介绍了港口航道视频监控与船舶AIS动态数据融合在航道执法中的应用,通过AIS数据对航道上港作船舶异常行为分析,实现对港作船舶异常行为的报警及跟踪,调用多个视频摄像机联动监控取证,使得港口航道执法更为高效。
航道 视频 AIS数据 执法
近7年来,湄洲湾港口每年的港航建设投资量都在30亿元到40元亿间,有大量的工程船舶在港作业,港作船舶违法事件时有发生,特别是抛泥船非法抛泥成为一个监管的难点。笔者在福建省湄洲湾港口管理局“船舶动态与航道监控信息系统”建设中,运用视频监控技术与船舶AIS(Automatic Identification System船舶自动识别系统)为航道监管执法提供信息化手段,取得较好的效果。本文就实时视频数据与船舶AIS动态数据整合、港作船舶异常行为分析和自动报警跟踪等主要技术应用进行阐述。
1 相关研究
船舶自动识别系统(AIS)是新型的助航安全信息系统,世界各地广泛开展了AIS数据应用的研究,我国对AIS动态数据在视频监控方面的应用也进行了许多深入的研究。例如:周剑敏和王捷的“基于AIS数据的智能船舶动态视频监控系统设计[1]”提出了从船舶自动识别系统中获取AIS船舶的动态位置信息,设计自动监控决策控制模块,然后建立待监控船舶的被监控优先因子算法,利用智能摄像球机实现对海上航行的船舶进行自动化智能视频跟踪监控;严忠贞的“内河在航船舶动态跟踪和航迹融合方法研究[2]”提出了基于内河视频监控的在航船舶目标识别方法,实现了视频、AIS、雷达数据的船舶运动轨迹融合;冯爱国的“导航雷达或AIS引导的视频监控系统设计[3]”提出了一种利用导航雷达自动跟踪参数或AIS动态数据引导的智能视频监控方法。该方法采用了船用雷达数据或AIS数据包,来控制视频监控云台,同时研究了云台姿态参考系统(AHRS)的方位及仰角数据回传、越界报警等。这些研究都是福建省湄洲湾港口管理局 “船舶动态与航道监控信息系统”建设和撰写本文的重要参考。
2 主要应用技术
要对抛泥船等港作船舶在航道及其附近区域的行为进行有效的远程监管,需要解决几个重要的技术环节。
(1)在数百甚至上千平方公里的海域范围内快速、准确地将目标船舶从众多的船舶中识别出来。
(2)用远程摄像机快速、准确捕获目标船舶,对其进行行为观察,必要时进行取证。
(3)能够在众多的港作船舶中识别出行为异常的船舶作为重点监管对象。
(4)必要时能够调用多个远程摄像机自动、稳定跟踪目标船舶并持续取证。
2.1 AIS技术
在事先知悉目标船舶的船名或者MMSI码的情况下,应用目前技术已经十分成熟的船舶自动识别系统在电子海图上识别目标船舶已经是很容易的事,这里无需赘述。
2.2 摄像机指向提示
在电子海图上识别出目标船舶之后,想要人工操作远程操作摄像机观察目标船舶仍然不是易事。由于海上缺乏参照物,摄像机拍摄的画面往往是无差别的海面,操作者很难通过判读画面决定摄像机的转向、俯仰角、焦距等操作技术参数以达到快速准确捕获目标的目的。
测定摄像机的大地坐标,在电子海图上进行标识,以此点为原点,以摄像机的主光轴为线,在电子海图上画出摄像机的指向的指示线。摄像机云台安装时的初始指向角度为正北,而系统控制摄像机转动的最小步进角度为0.3度,当系统控制云台进行转动时它的角度变化将实时传回系统,那么通过摄像机云台转动角度的变化进行计算得出指示线将随着摄像机的转动同步转动,用以指示摄像机的实际指向,操作者可借助电子海图界面上代表摄像机指向的指示线和目标船舶的相对位置关系来决策摄像机的转向、俯仰角、焦距等操作技术参数。
2.3 船舶异常行为分析
港作船舶异常行为分析是航道监管及行政执法的重要手段,对于发现船舶违法行为、提高航道执法工作效率具有重要意义。目前,所有港作船舶都安装了AIS系统,为船舶异常行为分析提供了技术条件。

图1 摄像机指示线及视频监控画面
港作船舶一般都有特定的正常行为规律,如果船舶打破常规,出现异常行为,往往违法的可能性很大,应该作为重点的监管对象。以抛泥船为例,往往有如下异常行为:
(1)AIS数据中断;
(2)离开装载点后偏离历史航行路线;
(3)离开装载点后未到达指定抛泥区域即返回;
(4)全航程时间明显变短 (可能在航行过程中抛泥,减少吃水,提高航速,节省燃油)。
利用现有研究成果“基于AIS数据的船舶异常行为检测方法[4]”,对船舶行为进行分析对比,包括航迹分割、正常行为建模和异常行为检测等技术环节,识别出行为异常的抛泥船,作为重点的监管对象。
2.4 船舶自动跟踪监控
通过AIS数据对船舶进行异常行为分析,一旦发现船舶有异常行为,系统通过AIS动态数据计算及预判得到船舶的位置,驱动远程摄像机捕获监控画面,实现对异常船舶跟踪监控。
船舶自动跟踪监控需要通过实时访问船舶动态数据库中的AIS船位数据,系统根据船舶的位置信息(AIS动态数据)和视频监控云台设备的初始位置信息进行计算得到视频监控云台的水平和垂直最佳角度,并控制云台在初始参数的基础上进行相关参数的变化调整以达到船舶目标的捕获与自动跟踪,计算过程如下:

图2 云台和目标位置关系图
水平方向是云台地面位置D点与目标海面位置C点它们的经纬度连线cd与正北的夹角;垂直角度为云台最高位置A点和目标最高位置B点的连线为ab,A点D点的连线ad为云台高度,ab与ad的夹角即为云台与目标的垂直夹角。
其中CD两点已知经纬度分别为 (lonc,latc)和(lond,latd),cd与正北的夹角(bearing)的计算公式为:
distance_North=R×(lat1-lat0)
distance_East=R×cos(lat0)×(lon1-lon0)
bearing=mod(atan2(distance_East,distance_North),2×pi)
通过余弦定理可求得垂直角度A,计算公式如下:

通过以上计算视频监控云台通过水平方向和垂直角度的调整即可保持对运动船舶的动态跟踪监控。
2.5 智能化联动
由于港口航道场景较为开阔,航道长度较长且远离海岸,对于同一港作船舶的跟踪监控可能需要多个监控点联动协作才能完成。视频的联动控制需要对AIS动态数据进行实时的分析,得出船舶实时位置信息,然后系统通过分析对比船舶与监控点的位置关系进行智能匹配,通过视频联动控制服务器向离船舶最近的视频监控点下发指令对船舶进行跟踪监控。如果有监控设备发生故障,没有监控画面回传,那么系统将故障设备排除在外,重新匹配视频监控点对船舶进行监控。
如图4所示,当船舶在不同的航段时,系统通过分析船舶AIS动态数据获取船舶实时位置,再和已知的视频监控点位置信息做分析匹配,选取距离船舶最近的监控点对其进行跟踪监控,当船舶进入下一航段时自动切换至下一视频监控点进行跟踪监控,实现视频监控的全航段覆盖监控。
3 应用案例
福建省湄洲湾港口管理局港口信息化支持保障系统(一期)项目将上述主要技术应用到船舶动态与航道监控信息系统建设中,主要硬件由5套高倍光学变焦摄像机(32X)、3台AIS基站接收机、以及视频与AIS数据融合服务器等构成。实现湾内主航道全覆盖,如图5。

图3 抛泥船舶监控示意图

图4 视频联动监控示意图
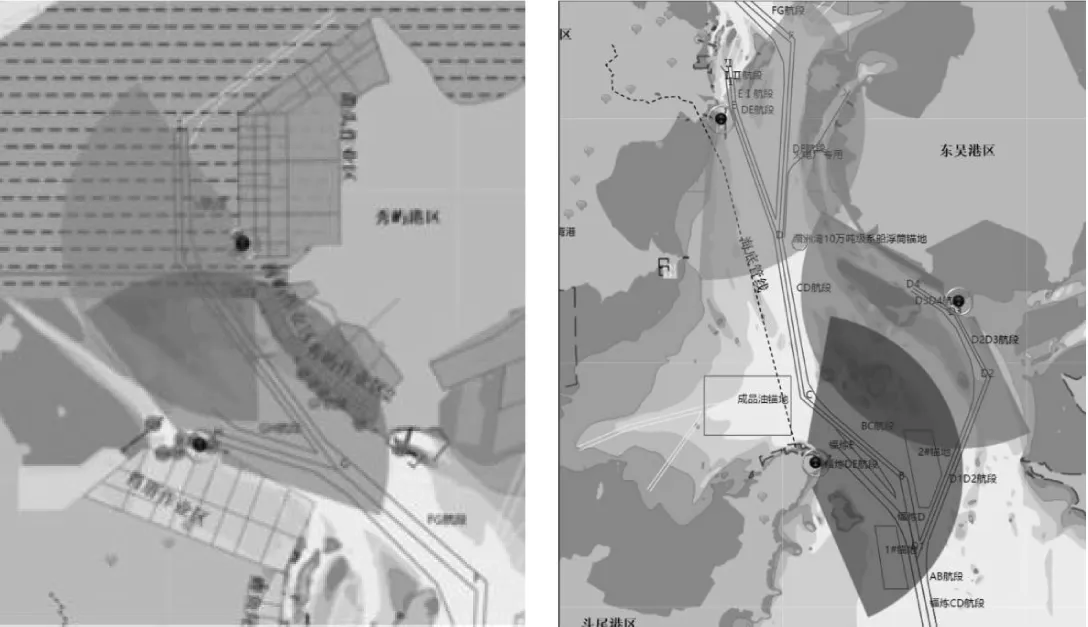
图5 湄洲湾主航道监控覆盖图

图6 海图上摄像机与船舶位置

图7 抛泥船跟踪监控画面
软件主要由AIS数据接收处理模块、监控平台数据库、智能决策模块、视频摄像机管理模块组成。智能监控模块通过结合电子海图、船舶AIS数据,计算及预判得到船舶的位置,来驱动远程摄像机获取监控画面,实现主航道上船舶跟踪监控。
为举例说明本文所述应用,截取了2017年8月13日上午某抛泥船在航道上跟踪监控情况:
系统在2017年8月13日识别到MMSI码为413907174的船舶触发异常行为监控启动条件。按系统预设,所有抛泥船舶正常情况下应从装泥点向湄洲湾出口方向航行,到湄洲湾外指定海域抛泥,而该船的航向是从装泥点向北偏东方向,即向湾内方向航行,因此被系统判定为异常行为,启动自动摄像跟踪并报警。经执法人员查证,该船原指定的抛泥区为湄洲湾外某海域,因莆头作业区某水运工程建设项目需要泥砂填方,经福建省湄洲湾港口管理局批准,该船被许可运送疏浚泥砂前往填方,但有关方面未通知系统管理人员改变该船的异常行为触发条件,改变设定条件后,系统即解除了对该船舶的异常行为监控,改为正常轮流监控。
4 结语
湄洲湾港口管理局的船舶动态与航道监控信息系统自2014年投入使用以来,已经协助执法部门查处违法抛泥等10多起违法案件,对违法行为形成威慑,减少违法行为的发生;可以有效地替代执法船海上巡查,降低执法船舶出动率,节约成本,提高执法效率。应用实践表明,综合运用远程视频、AIS船舶动态数据、智能分析判别、自动跟踪等多种技术可以为航道执法部门提供有效的信息化监控手段。实际应用中,该系统也还存在着一些不足,在自动跟踪模式下,很难对目标船舶实施长时间的稳定跟踪,出现“跟丢”现象。系统自动设定的摄像机水平角度、俯仰角度和焦距等参数也很难完全匹配,有时造成监控场景不完整、画面不清晰等问题。多数情况下仍需要监控人员做人工调整才能获得比较满意的监控效果,进一步改进的空间仍然很大。
[1]周剑敏,王捷.基于AIS数据的智能船舶动态视频监控系统设计[J].上海海事大学学报,2009.
[2]严忠贞.内河在航船舶动态跟踪和航迹融合方法研究[D].武汉理工大学,2013.
[3]冯爱国,薛丛华,吴炜.导航雷达或AIS引导的视频监控系统设计[J].电视技术,2016.
[4]张树波,唐强荣.基于AIS数据的船舶异常行为检测方法[J].Artificial Intelligence/s&/srobotics Research,2015.
猜你喜欢
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
电子制作(2019年23期)2019-02-23 13:21:16
计算机测量与控制(2018年1期)2018-02-05 02:07:24
留学(2017年5期)2017-03-29 03:03:54
中华老年口腔医学杂志(2016年3期)2017-01-15 14:25:02
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:17
现代情报(2014年6期)2014-08-18 12:16:59
水道港口(2014年1期)2014-04-27 14:14:38