
关于比幅制测角技术的仿真
2017-11-01 06:35:42民航宁夏空管分局
电子世界 2017年19期
民航宁夏空管分局 柳 斌
关于比幅制测角技术的仿真
民航宁夏空管分局 柳 斌
测角就是测量目标的方位角,二次雷达比幅制单脉冲测角,只用分析一个回波脉冲就可以确定目标到达角,因此称为“单脉冲”。本文使用ADS工具搭建仿真,模拟了单脉冲二次雷达比幅制的工作原理和实现过程。通过仿真,我们得到雷达测角受到目标距离,信道增益、衰减和相位差等几方面的影,研究内容可为雷达系统测角精度研究提供参考。
二次雷达;比幅制;单脉冲
一、二次雷达比幅制介绍
民航二次雷达采用比幅制测角时,波束以匀角速度旋转,所以相当于有两个脉冲相同并有重叠。当目标位于两个波束中间时,处于等信号轴,此时接收机收到的回波信号强度相等,当有偏离等信号轴时的,则收到的波束强度不等,偏离方向强度大于另一波束强度。因此,通过比较两波束回波的强弱就可以判断偏离方向,估算出偏离角度值得大小。
设已知天线方向性函数为f(θ),等信号轴OA的角度为θ0,则波束1、2的方向性函数可分别写为式(1),式(2):

θb为θ0与波束最大值方向的夹角。
采用等信号法,1号波束收到的回答信号:

2号波束收到的回答信号:

θT为偏离OA轴的角度,将从天馈系统接受到R1,R2信号送入汇流环(也称和差电桥)进行处理,产生相互正交的和、差信号。如图1所示。
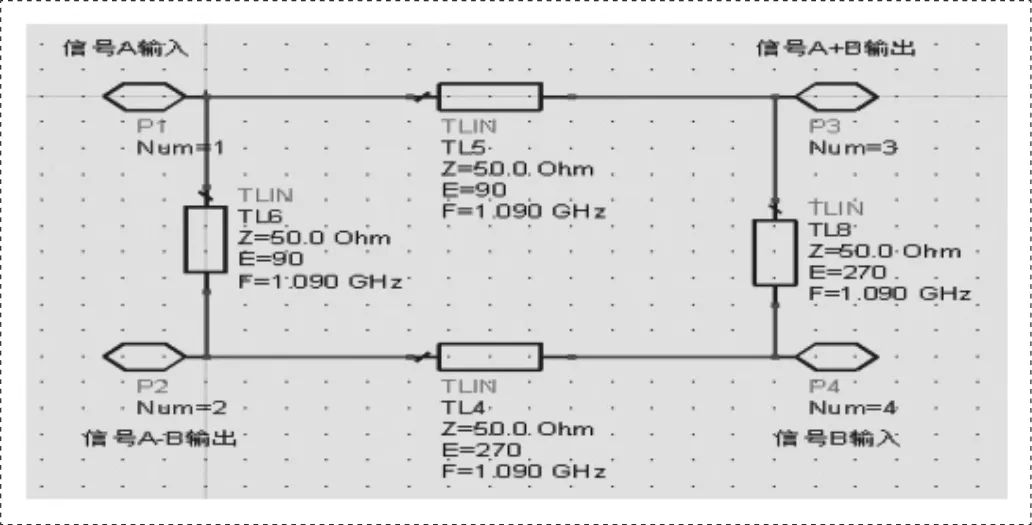
图1 和差电桥
R1,R2分别从P1和P4端口进入信号,P3端口将对这两个信号矢量叠加,由于传输到P3端口的相位变化相等因此号进行相加。P2端口输出的信号为P1和P4端口信号两个信号的相差λ/2个相位所以给他们做矢量差,。此时,相当对单脉冲二次雷达天馈系统的两个等效辐射单元接收的信号进行和、差处理。P2端口输出差(Δ)信号P4端口输出和(Σ)信号[1]。
差波束中心有一个左右对称很窄且很深的零值。若在波束的一侧存在回答信号,偏离瞄准轴的角度为θT,该信号同时被天线的和波束及差波束接收、并被检测[2]。通过差信号强度与偏离瞄准轴角度的关系,便可以得到对应偏离瞄准轴角度的大小。由于飞机距雷达站的远近距离不同,导致接收机收到回波信号强度也有所不同,当目标偏离瞄准轴的角度不变时,仅利用差信号回波输出幅度就可能造成测角误差。因此,使用和信号对差信号归一化。可通过测量相对比例(D/S或S/D)来克服了不同距离差信号强度不同的影响。如式(3),式(4)。


在θ0附近时,给他们归一化,θ0和θt成正比,因此可以算出角度,根据正负确定方向。如式(5):

二、利用ADS的仿真
利用ADS建模,二次雷达和差信号分别进入接收机系统,经过低噪放大器,镜像滤波器,然后进入混频器下变频,得到一个60MHZ的中频信号,接着送入带同滤波器滤波,再经过一个可变衰减器,同时对和差信号进行一个衰减,防止功率过大烧毁器件,最后进入一个单脉冲检测器进行一个和差信号的比幅。在实际过程中,考虑到雷达接收通道是有噪声的,使用谐波平衡模拟器模拟振荡器的行为模型带来的相位噪声,同时设置一个射频源模拟雷达天线进来的1090MHZ信号,考虑雷达的标称灵敏度最低可接收信号为-82dBm,用OSCwPhNoise连到混频器上,则如图2所示。

图2 含相位噪声的模拟图
在仿真中,滤波器采用巴特沃茨滤波器,设置中心频率为1090MHZ,通带带宽200MHZ,同时放入两个放大器,在中频放大器设置增益分别为10dB,20dB分别模拟两个通道增益不同时的状态。模拟运行,分别得到他们的S21参数。在中频放大器末端插入节点Vout,绘制Vout输出,单位采用dBm,在中频信号100MHz处放置一个marker标记,接收通道因为有23dB的功放增益和转换增益,所以输出为-59dBm。如图3所示。
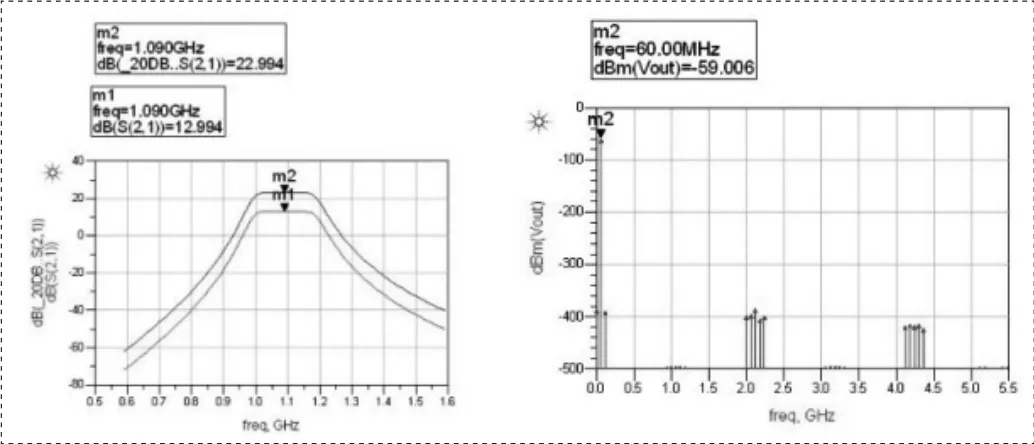
图3 S21和Vout输出结果
三、测量以及误差分析
1.增益或者衰减的变化造成误差。
两个接收通道的增益或者传输通道衰减应保持一致,这样最终信号就会按照固有的幅度成比例地放大。在实际过程中由于各种因素的影响,两接收通道应能够动态地调整增益,使增益偏差尽可能地小。当偏差超过门限值时,应能自动调整。当通道增益或衰减不一致时,如图,分别模拟了增益10Db,20dB时接收机系统获得的信号幅度,也就会使:
得值就会发生变化,从而得到错误的偏离值,在瞄准轴附近误差较小,但是目标偏离越大时测角误差也会随着越大[3]。
2.相移引发误差
这主要集中在两方面,一方面和(S),差(D)接收机应必须采用同一本振信号。这样经过混频以后和,差信号仍然保持原有(输入时)的相位关系。以便能够正常检测偏离瞄准轴方向的相位信息(符号信息);另一方面两等效辐射单元收到的回波信号存在一定的相差j。在设计和生产上应保持两个信号通道传输过程中保持固有的相位关系避免附加相移。因此在传输的过程由于两射频通道的相位误差,以及中频放大过程引起的附加相移,必须进行人为的调整,达到上述的要求。这样在电路设计上采用相位均衡电路,以保持和,差信号处于正交关系。
3.目标的远近不同造成回答信号进入接收机强度不同引发误差
不能单纯使用差(Δ)信号幅值作为判决目标偏离瞄准轴角度的依据。由式(6):

我们可以发现,在同一个方位上,目标距雷达站的远近不同所合成的差(Δ)信号的强度不同的,单纯使用差(Δ)信号就会造成判决偏离瞄准轴角度的错误。所以就必须得和(Σ),差(Δ)信号进行归一化,如式使方位相同信号的比例相同来保证偏离瞄准轴一致。
四、结束语
本文主要是研究了单脉冲雷达的运行原理和测角实现过程,通过仿真,模拟了单脉冲和差脉冲测角的实现过程,总体说来,主要有以下几个方面: 1)简化信号流程处理,以超外差接收机为模型,在不考虑外界环境和波束不对称情况下,从二次雷达和差接收通道对测角精度影响做以仿真。 2)系统的从原理上进行数学推导,分析了单脉冲比幅制的数学实现方法,同时结合具体型号雷达从功能实现上进行仿真分析。3)设计实现了测角仿真系统,模拟理想状态下,通道不同增益下和差信号对归一化的误差影响和在有相位噪声下接收系统Vout的输出曲线。
由以上所述分析可知雷达测角受到目标距离,信道增益、衰减和相位差等几方面的影,通过仿真结果,我们可以方便地观测出接收通道在增益和相位不一致对定向曲线和测角的影响,以及单脉冲比幅值为何采取和差归一化的重要性,分以上研究内容可为雷达系统测角精度研究提供参考。
通过分析可知,单脉冲技术作为新一代的测角技术优点毋庸可言,其方位分辨率较于传统测角技术有了大大的提高,当采取14位的编码器时,其角度误差小于。
[1]何光桥.民航系统中防撞告警技术的仿真研究.科技视界[J].2013(19).[2]李欣.浅谈二次雷达单脉冲测角技术.黑龙江科技信息[J].2011(30).
[3]M.C.Stevens.Secondary Surveillance radar. Artech House[M].1988.
猜你喜欢
北京航空航天大学学报(2020年3期)2021-01-14 00:37:00
通信技术(2019年3期)2019-05-31 03:19:08
数学物理学报(2018年4期)2018-09-14 03:41:08
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
测绘科学与工程(2016年6期)2016-04-17 06:51:25
制导与引信(2016年3期)2016-03-20 16:02:00
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
雷达学报(2014年4期)2014-04-23 07:43:19
