
基于非同步采集方式小型声源定位系统设计*
2017-11-01 07:19:14冷先帅汪华俊朱亚萍
传感器与微系统 2017年10期
冷先帅, 汪华俊, 朱亚萍
(杭州电子科技大学 浙江省物联感知与信息融合技术重点实验室,浙江 杭州 310018)
基于非同步采集方式小型声源定位系统设计*
冷先帅, 汪华俊, 朱亚萍
(杭州电子科技大学浙江省物联感知与信息融合技术重点实验室,浙江杭州310018)
利用非同步采集设备,通过广义互相关(GCC)时延估计算法,估算出通道间的相对时延;对非同步采集方式产生的时延误差进行软件补偿;利用基于到达时间差(TDOA)声源定位算法的双步定位特性,估算出声源的位置。分别设计了四元均匀线阵系统和四元平面十字阵列系统对以上方法进行验证,系统能够较准确地实现对声源方位的估计。
非同步采集; 声源定位; 广义互相关; 到达时间差; 补偿时延差
0 引 言
声源定位技术[1~4]广泛应用于各个领域中,军事上对低空飞机、炮弹、潜艇、机器人等的定位;民用上应用于视频会议系统、智能监控系统等。在声源定位系统中,希望以较低设计成本达到较高的声源方位估计精度。实际中,声源定位的实现多数建立在昂贵的多通道同步采集设备基础上,系统硬件成本较高。若采用非同步采集设备,可大幅度削减硬件成本,但轮回采集方式使得通道间存在时延误差。
本文基于到达时延差(time delay of arrival,TDOA)的声源定位具有运算量小、实时性高、定位精度高等优点,利用其双步定位特性,首先补偿非同步采样产生的时延差,再将声源与麦克风阵元之间几何关系,分别运用于四元均匀线阵和平面十字阵列中,实现对声源方位的估计。整个系统简单小巧、成本低、定位精度较高。
1 采集系统设计
采集系统[5~7]主要由驻极体麦克风阵列、放大电路、ART USB2810非同步数据采集卡、处理平台构成,系统框架如图1所示。

图1 采集系统框架
1.1 麦克风阵列设计
麦克风阵列指一组按照一定拓扑结构排列的若干个麦克风组成的阵列,其构建需要考虑阵列的几何结构、阵元间距、阵元个数和采用的麦克风的类型等因素。均匀直线阵列和平面阵列在特定的区域内定位性能优越,系统数学模型简单,运算复杂度较低,适用于绝大多数基于时间序列的算法,可选择性大,并且阵列实现成本低。因此,定位系统设计采用四麦克风的均匀线阵和十字平面阵分别实现。
图2四元均匀线阵中,M1,M2,M3,M4分别为4个等间距麦克风,其阵元间距为d,S为声源。选M2作为参考阵元,l1,l2,l3,l4分别为声源S到麦克风M1,M2,M3,M4的距离,4个麦克风阵元在平面直角坐标系中的位置分别为M1(-d,0),M2(0,0),M3(d,0),M4(0,2d)。声源S到参考阵元的距离为l=l2,与x轴方向夹角为θ,即声源方位角。图3中平面四元十字阵列中,4个麦克风阵元在空间直角坐标系中的位置分别为M1(d,0,0),M2(0,d,0),M3(-d,0,0),M4(0,-d,0)。声源S到原点的距离为l,声源方位角为θ,俯仰角为φ。
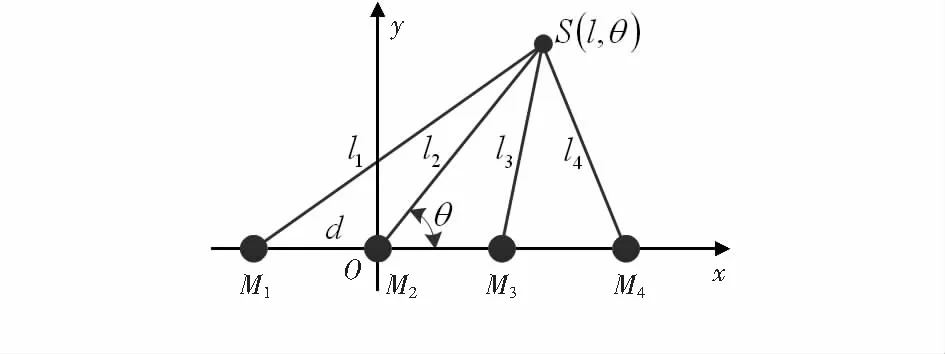
图2 四元均匀线阵几何定位模型

图3 平面四元十字阵列几何定位模型
1.2 信号采集电路
驻极体麦克风输出电压为毫伏(mV)级别,需要设计音频前置放大电路,将麦克风输出的电压信号放大到A/D设备能够采集的电压范围内。图4为麦克风前置放大电路的电路原理。采用集成运算放大器LA3210,具有较宽的线性工作区,放大信号改善信噪比,另外前置放大电路匹配阻抗防止信号衰减、差分放大降低了共模电噪声。

图4 麦克风前置放大电路
1.3 信号预处理
在采集的声音信号中,夹杂着电子噪声或者背景信号,对声源信号造成污染。抑制噪声信号对声源定位的影响,需要对信号进行预处理。首先进行带通滤波,采用巴特沃斯型有限冲击响应(finite impulse response,FIR)数字滤波器,抑制声源频率范围之外的其它频率信号,防止混叠干扰,同时软件滤波有利于节约成本;其次分帧处理,采用帧与帧之间重叠的方法,相邻两段数据重叠70%,避免失帧;再次加窗处理,设计中使用汉明窗,取窗函数h(n)和声源信号s(n)的乘积,保持信号的连续性,并可以有效地抑制旁瓣。汉明窗表达式如下(N为一帧数据序列的长度)
h(n)=0.54-0.46cos(2πn/(N-1)),
n=0,1,2,…,N-1
(1)
最后计算短时能量E和短时过零率Z,若E小于门限值可认为是噪声;否则,进入下一步骤。同样若Z在门限内,则表示检测到语音。E和Z的计算方法如下
(2)

s(n-1)]|}
(3)
2 基于麦克风阵列的声源定位
本文采用基于TDOA的声源定位方法:1)估计出同一声源信号到达各麦克风对之间的相对时延;2)在己获得时延的基础上,通过结合麦克风阵元间的几何关系确定声源的位置。此方法的关键是估计声源到达各麦克风对的相对时延,每得到一个时延值即可得到唯一的一个双曲面,因此,多个麦克风对即可得到多个时延值,多个时延值即可得到多个双曲面,声源的次优估计即为双曲面的交集。
2.1 时延估计算法
设计中采用广义互相关(generalized cross correlation,GCC)法估计时延[8,11]。通过求两信号之间的互功率谱,并在功率谱域内给予一定的加权,来对信号和噪声进行白化处理,增强信号中信噪比较高的频率成分,抑制噪声的功率,然后再反变换到时域得到广义互相关函数,从而在一定程度上锐化互相关函数的峰值,提高时延估计的精度。图5为GCC原理框图。

图5 GCC原理框图
麦克风接收到的声源信号数学模型
xi(k)=αis(k-τi)+Ni(k)
(4)
式中xi(k)为第i个麦克风接收到的声源信号;s(k)为声源信号;τi,αi,Ni(k)分别为声源信号到达第i个麦克风时的时延值、衰减系数和加性高斯噪声。
广义相关函数

(5)


(6)
此时GCC函数法称为GCC-PHAT[3]法,相对于其他GCC函数法,该方法对混响的抑制效果更佳。
2.2 基于非同步采集方式时延估计算法
本文采用ART USB2810采集卡,采集方式为多通道轮回采集,其应用的时间交替顺序采样技术不同通道之间有一定的时延,但时延时间固定,可以利用软件补偿的方法使各个通道达到近似同步采集的效果。在图2和图3的四元麦克风阵列中,以M2为参考阵元,其他阵元相对于M2接收

(7)
时延估计中,M1,M3,M4接收信号与M2接收信号时延差
(8)
综上,在时延估计阶段整个流程为通过GCC-PHAT法分别获得3对通道时延点数n21,n23,n24估算出对应的时延值;利用得到时延点数除以A/D的采样率得到相对时延值τ


图6 时延估计流程
2.3 声源位置估计算法
在图2四元均匀线阵中,由阵列与声源之间对应的几何关系,利用声速c和两阵元间的距离关系

(9)
可得如下方程组
(10)
根据均匀线阵的特性,可以得到3组声源位置的估计值分别为

(11)
(12)
(13)
最终的声源位置取该3组值的平均值
(14)
同理,在图3平面四元十字阵中根据几何关系有
(15)
结合式(9)可得声源位置为
(16)
3 实验结果与分析
实验在实际声场环境下采集声音数据,以验证系统的实际效果。选择空旷的室内作为声场环境,声源选择正弦波声源,分别对四元均匀线阵和平面十字阵系统进行测试。2个系统的测试结果如表1和表2所示。

表1 均匀线阵声源定位实验结果

表2 平面四元十字阵声源定位实验结果
由以上的实验结果可以看出,在室内混响和噪声较弱条件下,基于非同步采样时延补偿的方法能够实现对声源位置的有效估计。
4 结束语
当前基于麦克风阵列的声源定位技术广泛应用于室内会议系统。本文应用非同步采样设备,结合TDOA声源定位的方法,利用TDOA双步定位的特性,首先做时延估计,通过软件补偿非同步采样造成的采集通道之间的时延差,其次利用声源与麦克风阵元之间几何位置关系分别实现了四元均匀线阵和平面十字阵列对声源位置的确定,经过实验验证,该方法能够较为准确地实现对声源位置的确定,并且整个系统相对实现成本较低,简单小巧。
[1] 李大伟,慈林林,李 钊,等.声源定位在Micaz节点上的实现[J].无线电工程,2008,38(2):38-40.
[2] 吴 晓,靳世久,李一博.基于麦克风阵列声音信号定位方法的研究[J].传感技术学报,2010,23(5):682-686.
[3] 刘云武,杨卫.基于传声器阵列声源定位系统设计[J].压电与声光,2014,36(2):314-316.
[4] 王 楷,宗志亚,孙小惟.改进的自适应特征值分解声源定位算法研究[J].仪器仪表学报,2013,34(6):1241-1246.
[5] 张大威,鲍长春,夏丙寅.复杂环境下基于时延估计的声源定位技术研究[J].通信学报,2014(1):183-190.
[6] Akbari F,Moghaddam S S,Vakili V T.MUSIC and MVDR DOA estimation algorithms with higher resolution and accuracy[C]∥International Symposium on Telecommunications,2010:76-81.
[7] 罗中明,邴哲松.运动控制系统中数据实时采集的实现[J].自动化技术与应用,2008,27(7)56-58.
[8] 范卓立,黄根春.基于传声器阵列的声源定位算法与误差分析[J].传感器与微系统,2014,33(10):108-110.
[9] 马 驰,陈建峰,叶 永.基于四元十字阵的分布式声源定位实验研究[J].传感器与微系统,2013,32(11):52 -54.
[10] Pengcheng M U,Dan L I,Yin Q Y,et al.Robust MVDR beamforming based on covariance matrix reconstruction[J].Science China Information Sciences,2011,56(4):1-12.
[11] 杨 鹏,邢钰姣,孙 昊,等.基于BP神经网络的正四面体阵列声源定向研究[J].传感器与微系统,2012,31(5):8-9.
Designofsmallsoundsourcelocalizationsystembasedonasynchronousacquisitionmode*
LENG Xian-shuai, WANG Hua-jun, ZHU Ya-ping
(KeyLaboratoryforIOTandInformationFusionTechnologyofZhejiangProvince,HangzhouDianziUniversity,Hangzhou310018,China)
Use non-synchronous sampling equipment,by generalized cross correlation(GCC) time delay estimation algorithm to estimate the relative delay between channels.Second,compensate delay time error generated by non-synchronous collection method by software.Third,the location of sound source is estimated by the two-step localization feature of time difference of arrival(TDOA) sound source location algorithm.Four element uniform linear array and planar four element cross array system are designed to verify the above methods,the results prove the method can more accurately realize the estimation of the sound source orientation.
asynchronous acquisition; sound source localization; generalized cross correlation(GCC); time delay of arrival(TDOA); compensating time delay difference
10.13873/J.1000—9787(2017)10—0073—04
2016—10—24
国家自然科学基金资助项目(61427808)
TN 401
A
1000—9787(2017)10—0073—04
冷先帅(1990-),男 ,硕士研究生,主要研究方向为智能交通、嵌入式系统集成与开发。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:30
文史春秋(2022年4期)2022-06-16 07:12:52
数学大王·趣味逻辑(2021年3期)2021-03-10 11:21:26
复旦学报(自然科学版)(2019年3期)2019-07-19 09:48:04
复旦学报(自然科学版)(2019年3期)2019-07-19 09:48:04
电子制作(2019年23期)2019-02-23 13:21:12
电子测试(2018年23期)2018-12-29 11:11:24
汽车观察(2018年12期)2018-12-26 01:05:24
数学大世界(2018年1期)2018-04-12 05:39:05
小学科学(2016年12期)2017-01-06 19:36:17
