基于闭环负反馈控制的翻渣门式起重机研究
2017-11-01 21:03:17程雪利安林超
河南工学院学报 2017年4期
程雪利,安林超
基于闭环负反馈控制的翻渣门式起重机研究
程雪利,安林超
(河南工学院 机械工程系,河南 新乡 453003)
传统的翻渣门式起重机大多是人工控制翻渣过程,其在翻渣效率、翻渣动作控制等方面有很大的欠缺。基于闭环翻渣动作控制系统和采用液压驱动的四连杆翻渣机构的新型翻渣门式起重机,以理想翻渣位置作为输入信号,液压驱动的四连杆机构运动轨迹作为反馈信号,实现自动翻渣,提高了翻渣门式起重机的翻渣效率和作业可靠性。
翻渣门式起重机;闭环控制;四连杆翻渣机构
0 引言
翻渣门式起重机是一种将地下泥浆输送到地面、辅助地下盾构机等设备拆装的新型起重机,主要用于城市轨道交通施工,在地铁施工中运用最多。目前,国内地铁施工用的门式起重机是人工翻渣,人工打开渣斗底板,待翻渣结束后人工合上渣斗底板。这种方法工艺烦琐、效率低、操作工人危险性大。因此研究翻渣门式起重机的自动翻渣机构和翻渣动作的控制方式对生产安全和生产效率有重大意义。目前国内外对门式起重机的研究已很成熟,但对用于城市轨道交通建设的翻渣门式起重机研究较少。本文采用理想翻渣位置作为输入信号,将液压驱动的四连杆机构运动轨迹作为反馈信号,设计出基于闭环负反馈的翻渣动作控制系统和采用液压驱动的四连杆翻渣机构的新型翻渣门式起重机,为改进翻渣门式起重机的作业效率和稳定性提供科学依据[1-2]。
1 翻渣门式起重机结构及主要技术参数
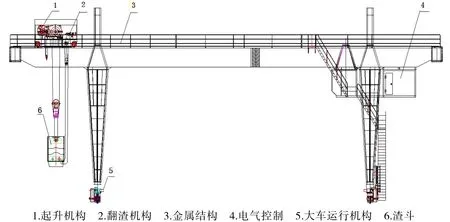
图1 翻渣门式起重机总体结构示意图
翻渣门式起重机总体结构如图1所示,主要由起升机构、翻渣机构、金属结构、电气控制系统和渣斗等组成,翻渣机构采用闭环控制的变频调速电机驱动,具有安全高效、翻渣位置准确等特点。该起重机起重量为45t,起升高度为9m,跨度为24.6m。翻渣门式起重机的主要技术参数见附表。
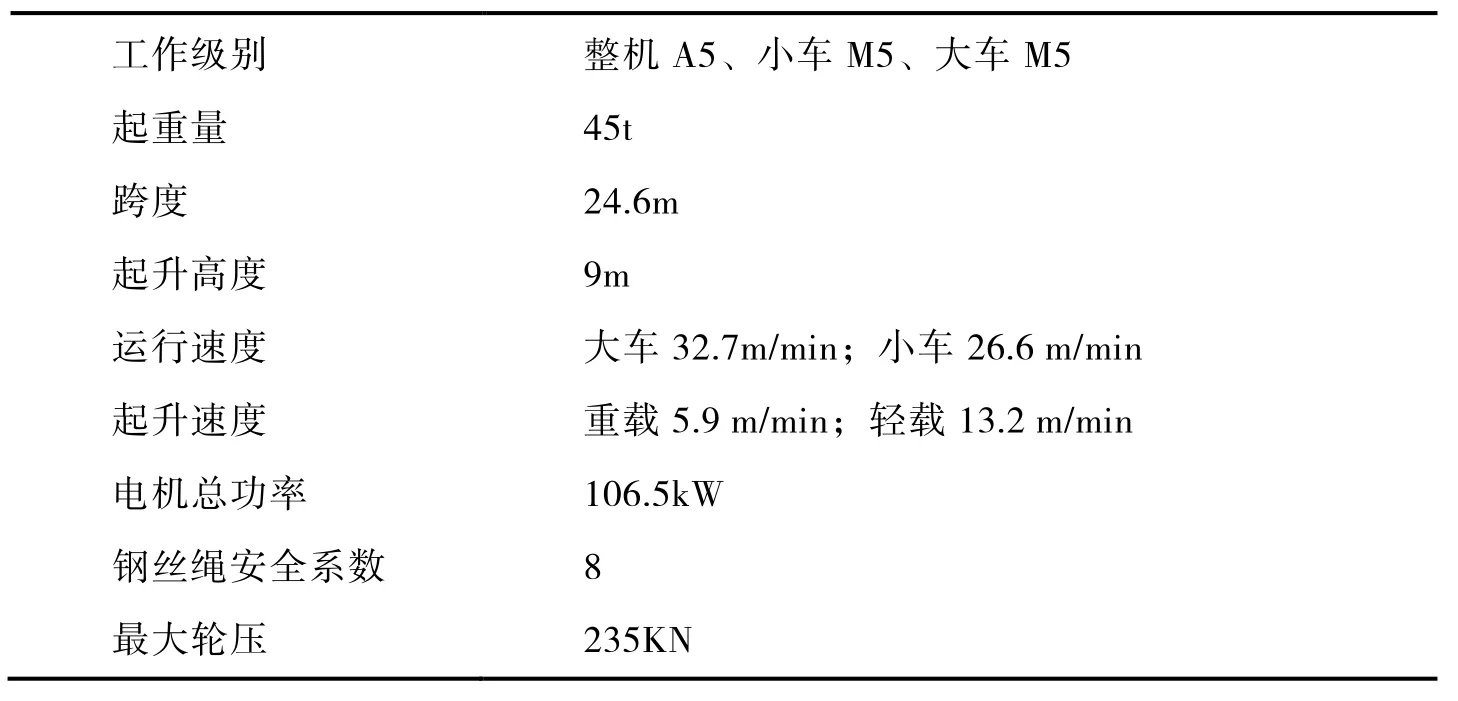
附表 翻渣门式起重机的主要技术参数
2 翻渣门式起重机工作原理
该门式起重机翻渣工作过程可以分为渣斗起升、带载运行到翻渣位置、渣斗下降、自动翻渣四个过程。这四个过程循环工作,不断把地下泥渣运送到地面泥渣回收站。其翻渣原理为:起升机构通过专用吊具将装有泥渣的渣斗从巷道中吊起,通过起升小车运行到翻渣位置,此时启动液压翻渣机构,液压油缸伸出带动四连杆机构运动,使拐壁钩住渣斗的偏心挂点位置,小车制动,启动起升机构,吊具下降带动渣斗倾斜到固定位置,渣斗自动翻转卸料;卸完料后,启动起升机构,使渣斗复位,再启动液压系统,推动液压缸带动拐臂脱离渣斗,由此完成一个工作循环[3-4]。
3 闭环翻渣动作控制系统
为了准确控制翻渣门式起重机的翻渣动作,设计了一套闭环负反馈控制系统。其控制原理如图2所示。该闭环控制系统以理想翻渣位置为输入信号,以液压驱动的四连杆机构运动轨迹为反馈信号,以液压缸和限位开关的动作为执行机构,以四连杆机构的动作为被控对象。
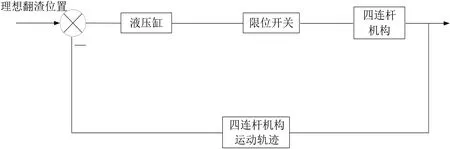
图2 翻渣起重机闭环控制原理图
开始翻渣时,启动液压系统,液压油缸推动四连杆机构运动,测量元件会实时把四连杆机构的运动轨迹反馈到控制系统,并和理想的翻渣位置(输入信号)进行对比求出偏差,当四连杆机构的运动轨迹和理想的翻渣位置(输入信号)一致时(偏差为零),限位开关起作用,使液压缸停止工作并自锁,起升机构下降开始自动翻渣。翻渣动作实现自动控制,大大提高了翻渣门式起重机的翻渣效率和安全可靠性[5-7]。
4 门式起重机翻渣机构
该起重机翻渣机构采用液压驱动的四连杆新型结构,其结构如图3所示。
液压驱动的四连杆翻渣机构固装在起升机构的小车架9上,由液压缸2、连杆3、限位开关4、挂臂5、渣斗7构成。其中液压缸2一端铰接在小车架9上,一端和连杆3铰接,小车架9、液压缸2、连杆3和挂臂5构成四连杆机构。
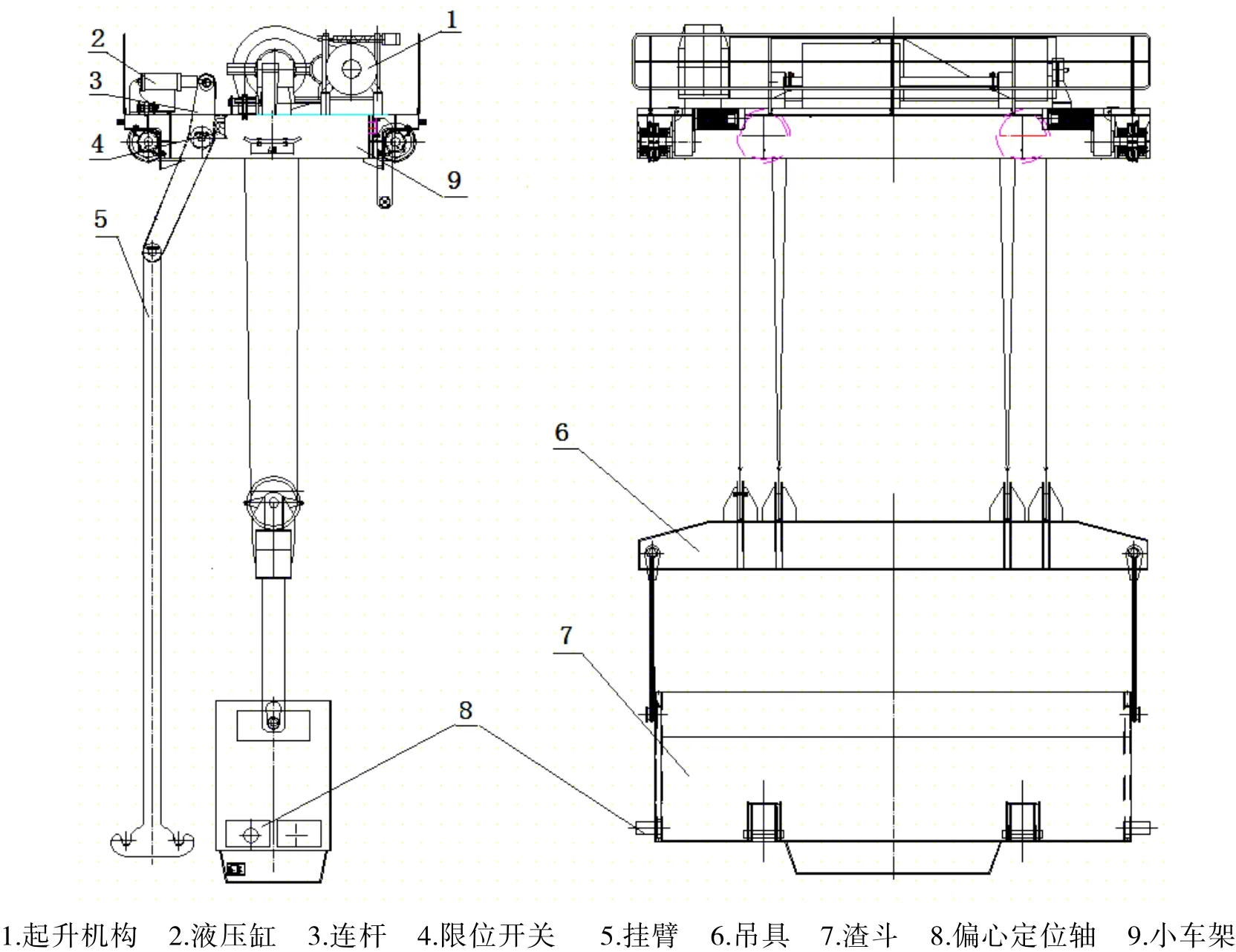
图3 翻渣机构示意图
当起重机需要翻渣时,启动起升机构 1,起吊渣斗 7到翻渣所需高度,通过小车运行机构把渣斗运送到渣场的正上方,然后启动液压系统,推动液压缸2带动连杆3转动,连杆3再驱动挂臂5平动,使挂臂5运行到偏心定位轴8的正下方,此时连杆3转动碰撞限位开关4,限位开关4起作用,液压缸停止工作并自锁;起升机构1带动渣斗7下降,使偏心轴8落到挂臂5的凹槽中,此时挂臂5挂好渣斗7,起升机构1继续下降,带动渣斗7绕偏心轴8转动到固定位置,起升小车制动,渣斗7自动翻转卸料;卸料完成后,启动起升机构1,使渣斗7复位,再启动液压系统,带动液压缸2回收,驱动连杆3和挂壁5转动复位,连杆3转动碰撞限位开关4,限位开关4起作用,液压缸停止工作,使渣斗和挂壁脱离,由此完成一个工作循环。
该四连杆翻渣机构采用限位开关进行限位,同时利用液压驱动的四连杆机构来实现偏心自动翻渣,不但结构紧凑、操作简单,而且定位准确、安全性能好[8-10]。
5 结语
本文通过对门式翻渣起重机的翻渣过程和四连杆翻渣机构进行分析,设计出基于闭环负反馈的翻渣动作控制系统和采用液压驱动的四连杆翻渣机构的新型翻渣门式起重机,提高了翻渣门式起重机的作业效率和可靠性。
[1] 程雪利,安林超,岳大灵,等.基于整机的龙门起重机动态特性分析[J].兰州理工大学学报,2013(4):28-31.
[2] 徐格宁.机械装备金属结构设计[M].北京:机械工业出版社,2009.
[3] 张质文,王金诺,包起帆,等.起重机械设计手册[M].北京:中国铁道出版社,2001.
[4] 安林超,田长留,岳大灵,等.基于闭环控制的过轨起重机设计[J].兰州理工大学学报,2014(5):38-40.
[5] 葛万成,皮尔考安东. 运用Matlab/Simulink R14实现实时位置控制[J].同济大学学报(自然科学版), 2006(1):126-128.
[6] 北京起重运输机械研究所.GBT3811—2008,起重机设计规范[S].北京:中国标准出版社,2008.
[7] 严大考.起重机械[M].郑州:郑州大学出版社,2003.
[8] 秦强,姚雄华,冯蕴雯,等.空间四连杆机构过中心锁定可靠性分析[J].机械强度,2014(5):710-715.
[9] 杨帆,王细平.门座起重机四连杆臂架系统Excel辅助设计程序的研究与开发[J].起重运输机械,2014(1):16-18.
[10] 顾井峰,冯蕴雯,冯元生.任意空间四连杆机构运动精度及其可靠性分析[J].机械科学技术,2012(5):814-817.
Study on Flipped Muck Gantry Crane Based on Closed Loop Negative Feedback Control
CHENG Xue-li,et al
(Department of Mechanical Engineering, Henan Institute of Technology, Xinxiang 453003, China)
Traditional flipped muck gantry crane control its flipped muck process by manual control,its flipped muck accuracy and action are very lack. Study of the ideal flipped muck position as the input signal,trajectory of hydraulic driven four-bar linkages as the feedback signal, design the flipped muck action control system which based on closed loop and the new flipped muck gantry crane which use hydraulic to drive four-bar linkages flipped muck mechanism, improved flipped muck gantry crane on flipped muck precision and reliability.
flipped muck gantry crane; closed loop control; flipped muck mechanism of four-bar linkages
TH218
A
1008–2093(2017)04–0001–04
2017-05-10
河南省高校青年骨干教师资助计划(2014GGJS-131)
程雪利(1978―),女,河南濮阳人,副教授,硕士,主要从事精密制造及计算机仿真优化设计研究。
(责任编辑 吕春红)
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10 02:36:20
中国特种设备安全(2022年6期)2022-09-20 02:53:48
冶金设备(2020年2期)2020-12-28 00:15:26
重型机械(2020年2期)2020-07-24 08:16:20
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
石油化工建设(2018年2期)2018-07-11 01:24:56
石油化工建设(2018年2期)2018-07-11 01:24:56
猪业科学(2018年4期)2018-05-19 02:04:36
石油化工建设(2015年6期)2015-12-01 04:17:35
石油化工建设(2015年6期)2015-12-01 04:17:34