
能见度不良条件下海上交通风险动态预评估
2017-10-30 08:43:37戴厚兴吴兆麟
中国航海 2017年2期
戴厚兴,吴兆麟
(1.大连海事大学 航海学院,辽宁 大连 116026;2.交通运输部 烟台打捞局,山东 烟台 264012)
能见度不良条件下海上交通风险动态预评估
戴厚兴1,2,吴兆麟1
(1.大连海事大学 航海学院,辽宁 大连 116026;2.交通运输部 烟台打捞局,山东 烟台 264012)
为提高海事主管部门的海上交通安全监管能力和服务保障水平,降低在能见度不良条件下发生海上交通事故的可能性,提出运用模糊综合评价方法建立能见度不良条件下的海上交通风险动态预评估模型,确立风险矩阵,拓展海上风险管理的思路和方法。实例分析结果表明,提出的风险动态预评估模型可有效提供具有实际指导意义的风险预警和安全操作建议,可为研发具有可视化、智能化预警监控功能的能见度不良条件下的海上交通风险动态预评估系统提供重要的理论支持。
交通运输工程;海上交通安全;能见度不良;模糊综合评价;动态风险预评估
当海上因出现大雾等能见度不良天气而使能见距离<1 km时,船舶安全航行将受到较大影响。尤其是在港口水域或海上通道水域航行时,受航道宽度、航道弯曲程度、航道水深和船舶交通流量等因素影响,一旦能见度骤降,船舶发生碰撞、搁浅、触礁和触损等海上交通事故的概率将大幅增大。
2010年5月2日,装载有约2.5万t钢材的利比里亚籍散货船“SEA SUCCESS”轮在能见距离<50 m的浓雾中航行时,在成山头东偏北约25 n mile处与装载有17.5万t铁矿石的香港籍超大型散货船“BRIGHT CENTURY”轮碰撞,导致“BRIGHT CENTURY”轮沉没、“SEA SUCCESS”轮艏部严重破损,并因燃油外泄而造成重大环境污染。[1]对此,研发具有可视化、智能化预警监控功能的能见度不良条件下的海上交通风险动态预评估系统,提供具有实际指导意义的风险预警和安全操作建议,使事故预防关口前移,有效提高海事主管部门的海上交通安全监管能力和服务保障能力,从而降低能见度不良条件下海上交通事故发生的可能性,具有重要意义。
运用现代数学方法、风险管理理论及风险评估技术标准,借鉴国内外有关海上交通风险评估技术、气象应用技术的研究成果和我国海事主管部门的事故调查报告及其数据分析,经过多方面、多层次、多渠道的问卷调查和现场调研,研究确定能见度不良条件下的海上交通风险等级。在此基础上,运用模糊综合评价方法建立能见度不良条件下的海上交通风险动态预评估模型,重点研究能见度、交通密度及船舶种类和尺度等3个因素相互作用下的海上交通风险问题,并确立风险矩阵。
提出的模型突出风险的动态可变性和预先可测性;突出船长的专业判断、海员的通常做法和实践经验的量化;突出重点关注船舶、重点关注海域和重大风险。该模型通过拓展海上交通风险管理的思路和方法,进一步提高能见度不良条件下海上交通风险管理的科学性、针对性和实际应用的可操作性。[2]
1 能见度不良条件下的海上交通风险等级的确定
这里研究的能见度不良条件下的海上交通风险主要是指船舶航行海域因在能见度不良条件下存在通航环境复杂、通航密度大、工程作业船或渔船活动频繁等现象而使船舶存在碰撞、搁浅、触礁和触损等事故风险。
考虑到现代海事管理中重点监管与差异化管理的理念,突出海上交通风险管理的科学性、针对性和有效性,提出的能见度不良条件下的海上交通风险预评估主要针对容易引发恶劣社会影响的群死群伤事故、重大环境污染事故和重大财产损失事故的船舶,主要包括客船、危险品船(含油船)、大型散货船和大型集装箱船等重点关注船舶。同时,对于实施海上交通风险预评估的海域,主要考虑重要航(路)道、事故多发区和船舶定线制水域等重点关注海域。[3]
目前国内外针对海上交通风险评估的研究多是宏观的、总体性的,而实际上当上述重点关注船舶在能见度不良条件下航经上述重点关注海域时,海事主管部门、船舶所属航运公司和船舶驾驶员都应对船舶未来在该海域航行时的海上交通风险进行预评估。这种评估是一种能结合航行海域各种可能影响航行安全的环境要素的预报状况进行的实时动态预评估。[4]
根据对海事主管部门、航运企业安全监督管理部门及32位资深船长的问卷调查结果和现场调研成果,结合相关航运企业船舶安全管理体系文件对能见度不良条件下船舶安全操作的有关规定,在深化《1972年国际海上避碰规则》第五章“船舶在能见度不良时的行为规则”的基础上,研究确定能见度不良条件下的海上交通风险等级(见表1)。

表1 能见度不良条件下的海上交通风险等级
2 能见度不良条件下的海上交通风险动态预评估模型的建立
在确定能见度不良条件下的海上交通风险预评估等级之后,即可建立能见度不良条件下的海上交通风险动态预评估模型。海上交通风险可表示为

(1)

海上交通风险具有时间变化波动性、空间分布差异性、时空变化不均衡性、单因素变化灵敏性和多因素耦合复杂性等特点,尤其是时空分布差异大、时空变化率不均衡,对变化速率大的风险因素及系统风险变化率大的状态进行预评估有助于将事故预防关口前移。[6]
在能见度不良条件下航经某一海域时,可能引发海上交通事故的主要因素应包括航道自然条件、交通条件、船舶条件和人员条件。由于这里重点分析的是环境因素对海上交通风险的影响,同时考虑到在实际工作中航道的规划和交通管理应是科学、有序的,船舶应是适航、可靠的,驾驶员和引航员应是合格、适岗的,因此假定这些方面的因素不对船舶的交通安全产生不良影响。
这样,可认为船舶在能见度不良条件下航经某一海域时可能引发海上交通事故的主要因素(即造成海上交通风险的致灾因子)主要包括当时的能见距离、船舶交通密度及作业工程船或渔船的数量等。
采用专家调研法(即与具有上述重点关注船舶操纵经验的资深船长研究讨论),根据在海上航行时上述致灾因子实际可能出现的状况,确定致灾因子的值域。
若能见度不良条件下的海上交通风险致灾因子可能的组合状态个数为m,则致灾因子A的论域为
A=(a1,a2,…,am)
(2)
由此可知,在能见度不良条件下的海上交通风险致灾因子A不同组合的取值状态ai下,可对应产生不同等级风险的模糊关系矩阵(即风险矩阵),可表示为
(3)
在得到能见度不良条件下的海上交通风险矩阵之后,可通过预报、预测等手段得到船舶未来各航行时段内各致灾因子的具体取值。例如:能见距离可通过当地气象部门得到;交通密度可依据船舶交通管理系统(Vessel Traffic Services,VTS)的实时监测数据,采用基于人工神经网络的预测方法得到。这样即可得到船舶航经某一海域时的海上交通风险预评估值。
能见距离和交通密度等致灾因子的预报值可能存在误差,因此应对预报值的准确性予以考虑。记某一时刻能见度不良条件下的海上交通风险致灾因子A不同组合的取值状态ai出现的概率为
P=(p1,p2,…,pm)
(4)
则该时刻、该海域海上交通风险预评估等级的模糊子集可表示为

(5)
式(5)中:xi(i=1,2,3)为预计在能见度不良条件下该时刻、该海域船舶交通风险状况对黄色(I级)、橙色(II级)和红色(III级)风险等级的隶属度,0≤xi≤1.0。
3 能见度不良条件下的海上交通风险矩阵的确立
从上述分析中可看出,能否得到科学可靠、与实际船舶风险状况相符合的能见度不良条件下的海上交通风险矩阵,直接关系到能见度不良条件下海上交通风险动态预评估结果的准确性。
这里选取客滚船、大型油船、大型散货船和大型集装箱船等重点关注船舶,结合专家问卷和讨论得到的能见度不良条件下的船舶交通风险状况原始数据,采用不完备信息条件下的风险评估理论和技术确定其能见度不良条件下的海上交通风险矩阵。[7]在这些船舶中:散货船按吨位大小分为0.3万~0.5万吨级、1万~3万吨级、4万~8万吨级和10万~20万吨级;集装箱船按箱位数分为500~<1 000箱级、1 000~<3 000箱级、3 000~<5 000箱级和8 000~10 000箱级;油船按吨位大小分为1万吨以下级、1万~2万吨级、3万~5万吨级、10万吨级和20万吨级以上;客滚(箱)船主要考虑吨位在2万t左右、航速在20 kn左右的高速客滚班轮或客箱班轮。调研得到的4万~8万吨级散货船在能见度不良条件下的海上交通风险矩阵见表2,相当于众多具有丰富航海资历的船长对某类船舶在各种可能的能见距离和船舶交通密度条件下所面临的海上交通风险的一种共同认知及专业判断。这种共同认知及专业判断正是船长长期以来对该环境状况下的海上交通风险的科学认识和实践总结,是《1972年国际海上避碰规则》第2条指出的“海员通常做法”的具体体现。
在船舶航行过程中,驾驶员正是按照这种专业判断和“海员通常做法”来操纵船舶的。因此,采用这种方法得出的风险矩阵和海上交通风险的评估结果,对于航海者(特别是缺乏经验的船长和驾驶员)而言,其指导意义和应用价值是显而易见的。
4 实例验证分析
在实际采用该模型对某类重点关注船舶的海上交通风险进行预评估时,可先在其航经某一重点关注海域之前通过预测得到该海域的能见距离、船舶交通密度等数据,然后选择事先通过不完备信息条件下的风险评估理论和技术得到的该类船舶在能见度不良条件下的海上交通风险矩阵,从而得到该类船舶通过该海域时的海上交通风险预评估值。[8]
例如,某日13:15时预计会有一艘8万吨级散货船在13:50—16:10航经某一海域,根据气象部门的预报可得到该船未来所经海域的能见距离。考虑到天气预报的准确性,将气象部门对历史预报情况进行统计得到的该海域大雾的预报准确率近似代替各时刻预报能见距离发生的概率。[9]同时,使用交通流预报工具得到上述3个时刻相应海域的船舶交通密度和出现概率。按照2个独立事件同时发生的概率公式计算出未来各时刻船舶所在海域出现某一能见度状况和船舶交通密度状况的概率。14:00时的计算结果见表3(15:00时和16:00时的计算结果略)。

表2 散货船(4万~8万吨级)在能见度不良条件下的海上交通风险矩阵
由此可知,该船在14:00时各种可能的致灾因子组合的出现概率为
表3未来船舶所在海域出现某一能见度状况和船舶交通密度状况的概率(14:00时)
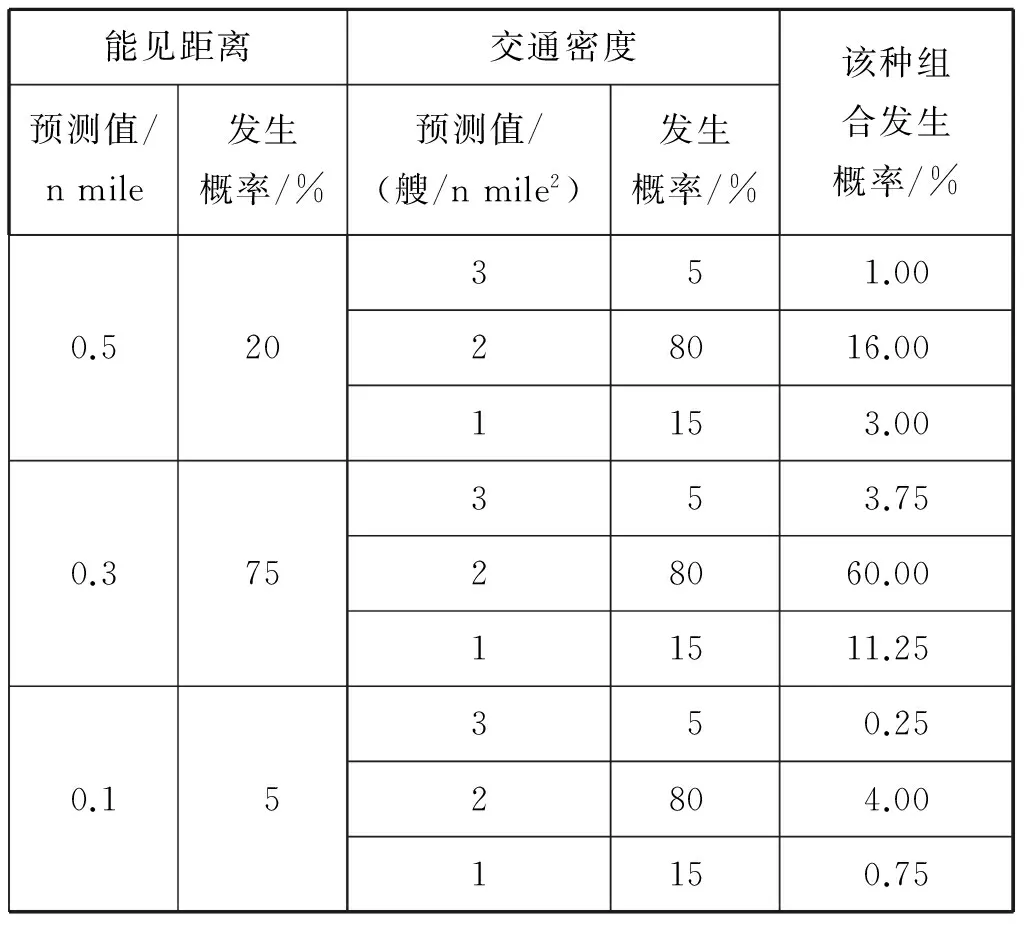
能见距离交通密度预测值/nmile发生概率/%预测值/(艘/nmile2)发生概率/%该种组合发生概率/%0.5200.3750.15351.0028016.001153.00353.7528060.0011511.25350.252804.001150.75
P14:00=(0.010 0,0.160 0,0.030 0,0.037 5,0.600 0,0.112 5,0.002 5,0.040 0,0.007 5)
(6)
根据表2给出的4万~8万吨级散货船的风险矩阵,可得到对应该船未来风险状况的风险矩阵为
(7)
由此,将式(6)和式(7)代入到式(5)中并进行归一化处理,即可得到未来14:00时船舶所在海域海上交通风险状况预评估结果为
B14:00=(0.20,0.50,0.30)
(8)
即14:00时船舶所在海域隶属于黄色、橙色和红色风险的隶属度分别为0.20,0.50和0.30。
同理可得15:00 时和16:00时船舶所处海域的风险状况预评估结果分别为
B15:00=(0.03,0.29,0.68)
(9)
B16:00=(0.10,0.40,0.50)
(10)
综上,可认为14:00时船舶所在海域隶属于橙色风险等级的概率大,而15:00时和16:00时船舶所在海域隶属于红色风险等级的概率大。从海上交通风险控制的角度来看,继续航行的安全风险过大,应考虑择地锚泊或滞航,待航行海域的能见距离增大或在海域内活动的船舶数量减少之后再继续航行。
5 结束语
现有的针对海上交通风险的评估理论和技术在能见度不良条件下的海上交通风险实时动态预评估方面与实际应用尚有较大差距。
本文建立的能见度不良条件下的海上交通风险动态预评估模型可有效提供能见度不良条件下的海上交通风险预警和安全操作建议,对海事主管部门的海上安全监管和航海者的安全操作具有重要的实际应用价值。
[1] 邹俊.成山头附近海域船舶雾航安全监管对策研究[D].大连:大连海事大学,2014.
[2] 范道津,陈伟珂.风险管理理论与工具[M].天津:天津大学出版社,2010.
[3] 范中洲.船舶定线制优选方法的研究[D].大连:大连海事大学,2013.
[4] 刘大刚,吴彬贵,解以扬,等.海事气象保障服务现状及发展趋势[J].中国航海,2014,37(1):131-135.
[5] BALMAT J F,LAFONT F,MAIRRET R,et al.A Decision-Making System to Maritime Risk Assessment[J].Ocean Engineering,2011,38(1):171-176.
[6] KUJALA P,HANNINEN M,AROLA T,et al.Analysis of the Marine Traffic Safety in the Gulf of Finland[J].Reliability Engineering and System Safety,2009,94(8):1349-1357.
[7] 黄崇福.自然灾害动态风险分析基本原理的探讨[J].灾害学,2015,30(2):1-7.
[8] 傅刚,徐杰,张树钦.数值模拟和卫星反演大气能见度对比分析[J].中国海洋大学学报(自然科学版),2011,41(4):1-10.
[9] 张苏平,鲍献文.近十年中国海雾研究进展[J].中国海洋大学学报(自然科学版),2008,38(3):359-366.
DynamicRiskPre-EvaluationforMaritimeTrafficUnderLimitedVisibility
DAIHouxing1,2,WUZhaolin1
(1.School of Navigation,Dalian Maritime University,Dalian 116026,China;2.Yantai Salvage Bureau,Ministry of Transport,Yantai 264012,China)
The general idea and method to determine the risk matrix for maritime traffic under restricted visibility is presented for maritime departments to improve the supervision of maritime traffic and their service level.The example analysis shows that the proposed new pre-evaluation model can effectively provide practical early warning and operational suggestions for maritime traffic management under restricted visibility.This work can provide important theoretical support for developing the visualized and intelligent dynamic risk pre-evaluation system.
traffic and transportation engineering; maritime traffic safety; restricted visibility; fuzzy comprehensive assessment; dynamic risk pre-evaluation
U698
A
2017-01-15
交通运输部海事局项目(0706-14400003N010)
戴厚兴(1966—),男,山东临沂人,高级工程师,船长,博士生,主要从事交通运输安全保障与防护技术研究。E-mail:capt.dai@163.com
1000-4653(2017)02-0065-04
猜你喜欢
中国宝玉石(2021年5期)2021-11-18 07:42:32
船舶(2021年4期)2021-09-07 17:32:22
石油化工建设(2020年1期)2020-08-24 07:02:02
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
海洋信息技术与应用(2017年2期)2017-06-21 19:51:29
中国船检(2017年3期)2017-05-18 11:33:09
中国交通信息化(2016年6期)2016-06-06 07:11:30
海洋气象学报(2016年3期)2016-02-28 14:27:42
