
一种方便上下爬楼的轮椅
2017-10-23 18:19李小齐
学习导刊 2017年1期
李小齐
摘要:
普通轮椅一般由轮椅架、车轮、刹车装置及座靠四部分组成。手摇轮椅在普通轮椅基础上,增加手摇装置。楼梯台阶等却使轮椅的使用受到很大限制,传统的轮椅智能在平地上行走,不能顺利通过台阶等障碍物,更不能上下楼梯,一般需要借助外人进行搬抬,这对于一些住在没有安装电梯楼房中的轮椅使用者造成了麻烦。本设计将轮式和履带型结合,以及轮椅自动化设计有效的解决了目前轮椅无法顺利通过台阶楼梯等障碍的问题。
关键词:轮椅 履带型 自动化
技术背景:
轮椅是年老体弱者以及下肢伤残者必不可少的代步工具。目前年老体弱者以及下肢伤残者所用轮椅大多都是普通车轮式轮椅。随着无障碍设施的增多,轮椅使用者的活动范围逐步加大。但楼梯台阶等却使轮椅的使用受到很大限制,因此研发价格低廉简单易用的可爬楼梯台阶等障碍的轮椅是一项比较紧迫的任务。本设计主要用于解决目前轮椅无法顺利通过台阶楼梯等障碍的问题。保证能够在平地行走的同时,还能够顺利通过台阶登爬楼梯。本设计老人上下台阶轮椅具有占用空间小,使用方便,运动平稳,安全高效,行走效率高等特点。另外,本设计老人上下台阶轮椅中座椅高度具有可调节功能,以及在爬楼梯和斜坡时座椅可调节角度保证座椅水平平衡。
技术特点:
本设计主要用于解决目前轮椅无法顺利通过台阶楼梯等障碍的问题。保证能够在平地行走的同时,还能够顺利通过台阶登爬楼梯。本设计老人上下台阶轮椅具有占用空间小,使用方便,运动平稳,安全高效,行走效率高效等特点。另外,本设计老人上下台阶轮椅中座椅高度具有可调节功能,以及在爬楼梯和斜坡时座椅可调节角度保证使用者平衡舒适。
技术介绍:
1. 首先调整好座椅到适当高度和角度位置,之后使用者通过控制手柄可以对轮椅进行操作。
2. 在平地行走时,通过控制器,选择使用轮式机构操作模式模式行走
3. 挡遇到台阶和楼梯等时,选择履带型机构行走模式,液压控制系统降出内置履带型机构,此时可调节座椅姿态,并调整座椅到合适高度和角度,保持座椅平衡和稳定。不用时,履带型机构收回内部。
4. 通过控制器控制行走速度和方向。
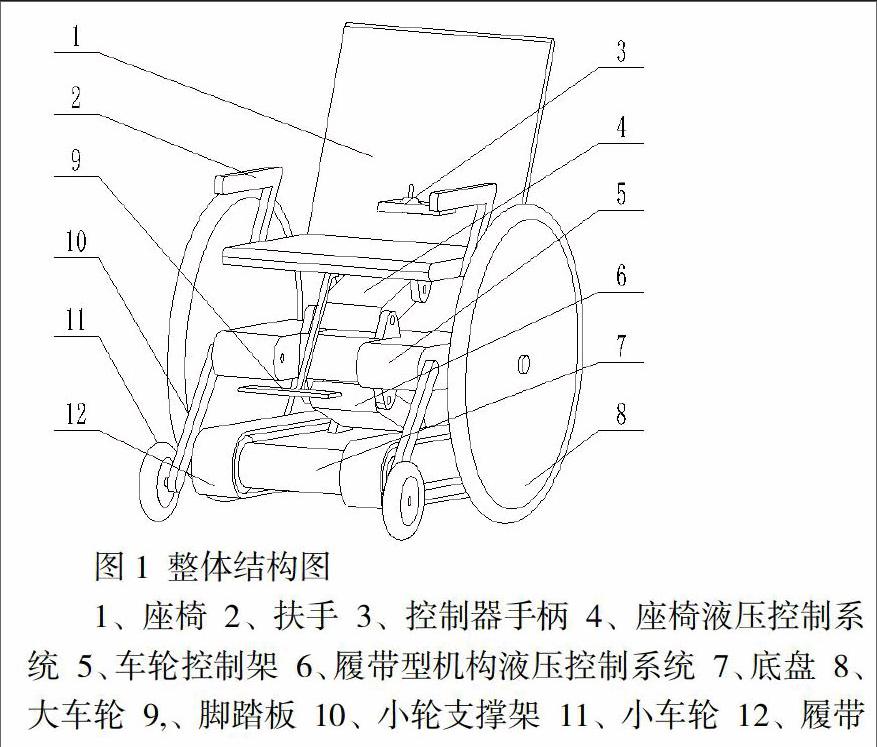
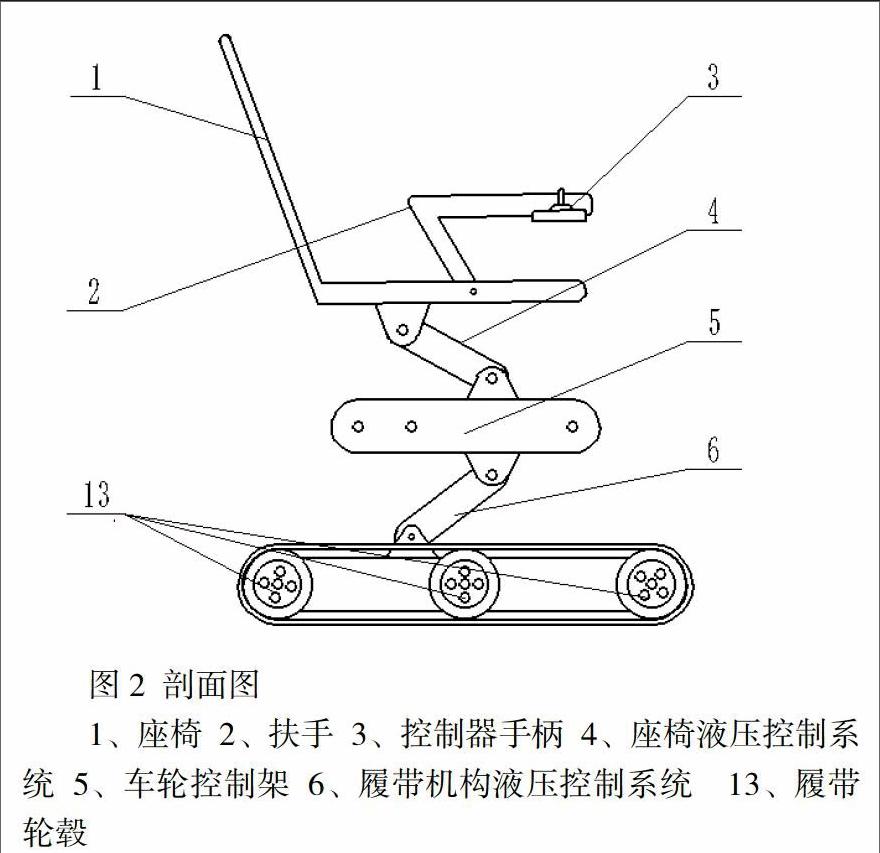
结构介绍:
控制器手柄用于选择行走模式,智能调空座椅姿态以适应使用者,以及控制行走速度。调整座椅高度。如图所示控制器手柄固定在右扶手一侧,适应使用者右手控制轮椅。脚踏板用于放置使用者双脚,防止触碰地面和履带型机构,保证使用者安全。
座椅液压控制系统控制调节座椅姿態,保持一定高度和水平,适应使用者;履带机构液压控制系统控制调节履带型机构。
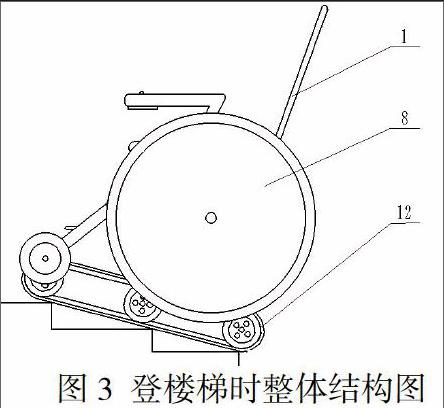
如图3所示上述老人上下台阶轮椅遇到楼梯时,使用者在控制器手柄选择履带型行走模式,履带型机构液压控制系统控制履带型机构,降下内置履带型机构,并自动调整角度适应楼梯坡度,底盘控制驱动履带运动登爬楼梯,使用控制手柄控制前进速度,同时可调节座椅到合适姿态。在平地行走时,选择车轮行走模式,履带型机构收回,车轮触及地面,车轮控制架驱动大车轮前进,手动操作控制手柄控制前进速度和方向。
工作原理:
使用时,首先调整座椅到适当高度和角度位置,之后通过控制器手柄对轮椅进行操作。在平地行走时,通过控制器手柄,选择使用轮式机构操作模式行走;挡遇到台阶和楼梯等时,选择履带型机构行走模式,此时内置履带型机构液压控制系统将履带机构降下,随着履带机构的下降整个座椅抬起,直到大车轮离开地面,根据需要通过控制器手柄调节座椅的姿态,并调整座椅到合适高度和角度,保持座椅平衡和稳定,操控控制器手柄通过控制履带型机构液压控制底盘控制履带车轮的行走速度和方向,进行爬楼。爬楼梯结束后,履带型机构液压控制系统收回内部。
部分零部件:
参考文献
[1] 李超, 胡延平, 韦端利,等. 一种轮组结构的爬楼梯轮椅的设计[J]. 现代机械, 2010(6):42-44.
[2] 郭永利. 一种爬楼梯的轮椅: CN, CN2461518[P]. 2001.
[3] 王淑坤, 孟晓东, 尚鸿鹏. 一种轮履组合式爬楼轮椅的设计[J]. 机械传动, 2013(10):156-159.
[4] 周秋雨, 邢晓冬. 一种可全向移动爬楼梯轮椅的结构设计与分析[J]. 机械传动, 2016(4):74-80.
[5] 李育文, 位建康, 王红卫,等. 一种新型的可爬楼梯轮椅结构设计及运动分析[J]. 制造业自动化, 2014(7):135-137.
[6] 张林, 黄亚宇. 基于TRIZ理论的爬楼轮椅行走机构创新分析与设计[J]. 新技术新工艺, 2014(10):62-64.endprint
猜你喜欢
小天使·一年级语数英综合(2019年4期)2019-10-06
微型小说选刊(2019年5期)2019-09-10
金山(2018年9期)2018-11-21
中国市场(2016年36期)2016-10-19
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
爆笑show(2015年5期)2015-07-09
人生与伴侣·共同关注(2009年36期)2009-01-15
科学启蒙(2006年1期)2006-01-11
