
声纳基阵信号模拟器设计与实现∗
2017-10-23 07:40:38齐正云褚福照
舰船电子工程 2017年9期
齐正云 褚福照
(上海船舶电子设备研究所 上海 201108)
声纳基阵信号模拟器设计与实现∗
齐正云 褚福照
(上海船舶电子设备研究所 上海 201108)
声纳基阵信号模拟器是在实验室条件下对声纳信号处理算法进行研究的重要工具,也是对声纳性能进行初步检验的主要技术手段。对声纳接收信号模拟的真实程度直接决定了模拟器是否能够有效对声纳性能及新算法进行有效验证,论文采用现代数字信号处理技术结合当今先进的数字信号处理板构建了声纳基阵信号模拟器。该模拟器可为声纳提供不同水文条件、海洋环境、目标状态时的基阵接收信号,它可以依据一定的阵列形式完成流噪声、海洋环境噪声和水面舰噪声阵元级信号的模拟,并将以上信号与模拟的拖曳线列阵阵元接收目标信号进行集成,为声纳性能测试及信号处理算法的研制、改进提供了前提条件,缩短了研制周期。通过对该模拟器所产生的基阵信号进行处理得到的波束形成结果验证了该模拟器的有效性。
基阵信号;模拟器;背景噪声
C lassNum ber TP391.9
1 引言
从20世纪80年代起,几乎每一台新型声纳的研制同时都研制对应的信号模拟器。所谓的声纳信号模拟器,就是模拟不同水文条件、海洋环境、目标状态时声纳所接收到的信号的模拟装置。声纳基阵信号模拟器作为声纳技术发展中的一个重要组成部分,在实验室条件下就可完成陆上试验声纳所需接收信号的模拟,为声纳样机提供测试调试环境,对声纳的报警正确率、漏报率等指标进行初步验证传统的声纳信号模拟器一般采用硬件的方式来实现,它的最大优点在于工作比较稳定,其缺点主要是体积大,灵活性比较差。运用现代数字信号处理技术结合当今先进的数字信号处理板而研制的声纳信号模拟器可以很好地解决上述问题,它体积小,通过嵌入不同的软件包,可以满足不同系统的要求[1~4]。
声纳基阵信号模拟器提供一种实用的、可近似仿真实际探测目标及海洋环境的阵元级信号发生器。它能够对目标辐射噪声、水面舰辐射噪声,海洋环境噪声,流噪声等进行阵元级信号仿真。
2 系统设计
2.1 系统功能
声纳基阵信号模拟器是声纳接收信号的集成端,以通用信号阵列处理系统为运行环境,实现了大量仿真算法,包括仿真来自多个运动目标的辐射噪声信号、来自水面舰的辐射噪声信号、来自海洋环境的背景噪声信号、流噪声信号,以及对传播信道的仿真。
2.2 系统组成
声纳基阵信号模拟器系统框图如图1所示。该模拟器主要由显示控制软件和信号处理程序组成。显示控制软件主要完成参数设置、实体运动模拟、系统运行控制、运行态势显示以及波束形成结果显示功能。信号处理程序主要包括目标辐射噪声模拟、目标信号时延实现、流噪声模拟、海洋环境噪声模拟和水面舰辐射噪声模拟,其中水面舰辐射噪声模拟在刀片服务器上实现,其余模块在信号处理平台实现。
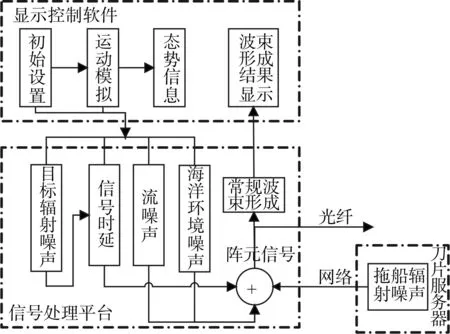
图1 系统组成框图
1)显示控制软件
显示控制软件主要由参数设置模块、各实体模型以及显示模块组成。其中参数设置模块由初始参数设置、鱼雷攻击方案设置和声场环境设置组成;各实体模型由水面舰模型、小目标模型以及潜艇模型组成;显示模块由运动态势图和波束形成结果图组成。
2)目标辐射噪声
在水声对抗过程中,目标辐射噪声是声纳对水下小目标进行检测和识别的重要信息来源。目标辐射噪声产生模块承担模拟鱼雷及其他干扰小目标的辐射噪声的任务。该模块可以模拟水下小目标辐射噪声的线谱、平稳连续谱、时变调制谱等特征,这些特征随目标的类型、航速等参数的变化而变化[5~6]。
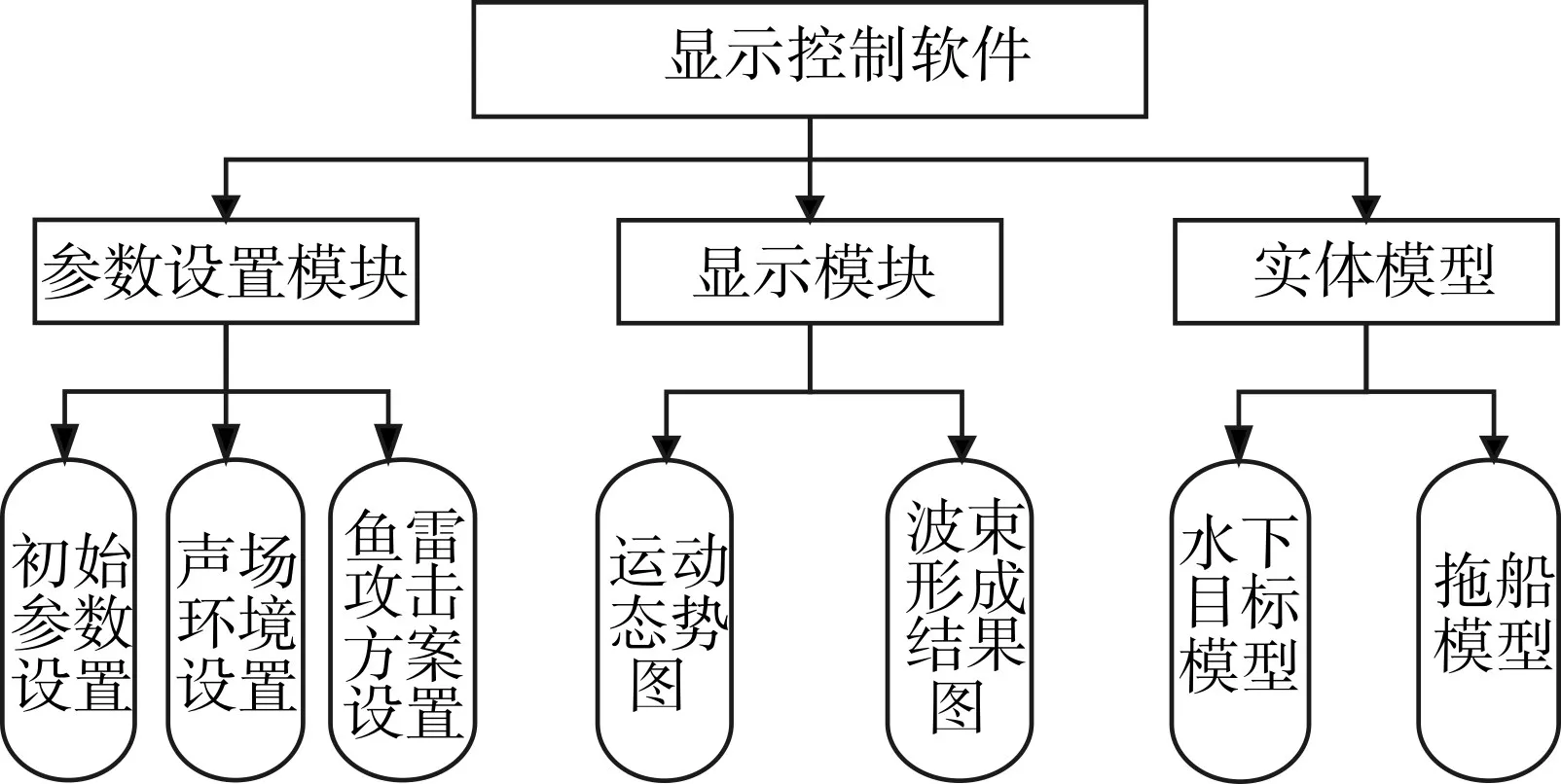
图2 显示控制软件组成图
3)流噪声
流噪声生成模块承担声纳流噪声模拟的任务。该模块由完全相同、相互独立的若干通道构成,每一个通道用于模拟一路流噪声信号,可以通过航速和声阵外径的改变控制流噪声的强度[7~8]。
4)海洋环境噪声
背景噪声为水面舰自噪声、流噪声和海洋环境噪声综合的干扰噪声。主要的背景噪声为水面舰自噪声。故海洋环境噪声近似采用高斯白噪声进行模拟。海洋环境的噪声级依据深海平均海洋环境噪声谱,查表并插值得到。
5)水面舰辐射噪声
水面舰辐射噪声生成模块承担水面舰辐射噪声模拟的任务,它在IBMBladeCenter HS21刀片服务器上完成。该模块可以模拟不同航速、吨位下的水面舰辐射噪声。
3 系统实现
基于上述系统设计的基础上,本系统实现所需主要硬件设备及软件运行环境如下:
1)信号处理机一台:包括四块信号处理板(共24片ADSPTigerSharc201处理芯片),一块主控板,一块网络交换板;
2)IBMBlade Center HS21刀片服务器一台;
3)主控板使用Windows XP操作系统作为运行平台,显示控制软件使用VisualC++;
4)信号处理程序编译软件使用VisualDSP++;
5)IBMBlade Center HS21刀片服务器使用Red Hat企业版RHEL5.4操作系统作为运行平台。
3.1 目标辐射噪声
水下运动目标辐射噪声谱的模型可按如下函数表示:

其中,GL(f)为低频线谱,GX(f)为平稳连续谱,m(t)为时间调制函数,m(f)为幅度调制函数。其功率谱模型采用

其中参数α影响谱线峰的尖锐程度,f0决定G(f)的曲线峰值位置;fm决定曲线的尖锐程度和高度,采用该模型,高频段大致有-6dB/oct的衰减率;时变噪声谱主要是指螺旋桨叶片速率谱对平稳连续谱的幅度调制,其谱特征可以用如下函数描述:

其中,m(t)是周期调制函数,反映辐射噪声时变调制的时变规律,采用幅度和宽度可调节的矩形脉冲串模型,该模型很好地反映出螺旋桨主轴转速和叶片数对包迹谱的影响。m(f)是调制深度谱,可用简单的矩形函数来实现。
连续谱信号依据信号形式的不同建立具有特定谱形状的功率谱模型;由功率谱模型做IFFT得到自相关函数;采用Levison算法产生AR滤波器;使均值为0,方差为1的高斯白噪声通过AR滤波器,就产生了具有指定谱形状的连续谱信号。
线谱的模拟可通过以下公式:

其中Ai、ωi、φi分别是振幅、频率和相位信息。这三个量的前两个是根据实际情况对线谱的振幅和频率进行估算来确定,而相位信息相对而言不是很重要,可以用一个随机量来表示。
3.2 流噪声
功率谱模型采用下式计算:
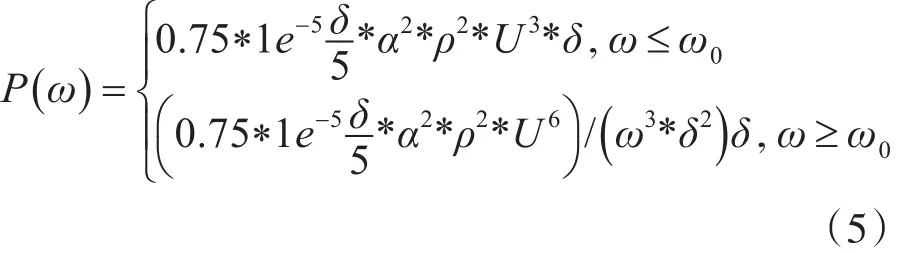
其中,U 为航速,单位m/s;ω0为截止频率;δ=U/ω0为边界层排挤厚度;ρ为水密度,单位kg/m3。依据设定的海水密度、截至频率以及显示控制软件实时写入的水面舰航速计算出流噪声的功率谱模型。由功率谱模型做IFFT得到自相关函数;采用Levison算法产生AR滤波器;使均值为0,方差为1的高斯白噪声通过AR滤波器,就产生了具有指定谱形状的流噪声信号。
3.3 水面舰辐射噪声
水面舰辐射噪声级:

其中,V为水面舰航速,单位节;D为水面舰重量,单位吨;f0为频率。
水面舰辐射噪声模块由水面舰辐射噪声发生模块、多途信道模块和运行轨迹模块组成[9~12]。
1)水面舰辐射噪声发生模块
被动拖曳线列阵声纳通过检测目标辐射的噪声来发现目标,并进行测向、测距和识别。研究被动声纳的信号处理首先必须克服声纳安装平台(水面舰)辐射噪声的影响,针对其特性采用相应的最佳处理方法。水面舰声源被假定为点源,它辐射连续谱噪声和线谱序列。“辐射噪声发生模块”产生水面舰辐射噪声的仿真信号。水面舰辐射的连续谱和线谱均和舰船的船型和航速有关。
2)多途信道模块
根据水文条件、海洋中海面和海底的声学特性、目标实体的位置和深度等参数,利用射线声学本征声线的方法建立海洋多途信道模型,计算出目标实体之间的海洋信道的冲激响应函数,从而对声学参数和信道进行处理。
3)运行轨迹模块
实际水面舰在航行过程中,必然存在直航和转弯情况,为了更加真实模拟水面舰的运行轨迹,分别将直航和转弯情况嵌入到并行程序中,可以实时地实现舰船的任意角度的转弯情况信号模拟。
由刀片服务器产生水面舰辐射噪声信号,通过千兆网口传输至交换板,交换板利用winpcap方式从网络抓包,将抓到的数据包通过LINK传输方式发到指定的信号处理芯片上。
4 系统测试验证
下面给出两种态势下,声纳基阵信号模拟测试结果。
1)水面舰的初始坐标为(0,0),航速DI节,航向90度;鱼雷的初始坐标为(8718,-5000),航速DA节,初始航向90°;目标1的初始坐标为(2500,-4500),航速 DB 节,航向 300°,作直线运动;目标2的初始坐标分别为(3500,2500),航速DD节,航向210°,作直线运动。未融合水面舰信号下的仿真态势图和信号波束形成结果图如图3和图4所示。
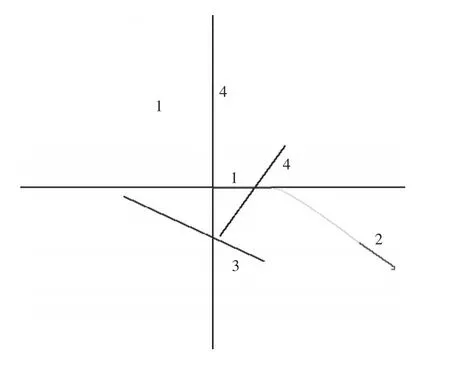
图3 运动态势图

图4 信号波束形成结果
2)水面舰的初始坐标为(0,0),航速DI节,航向90°;鱼雷的初始坐标为(0,-8000),航速DB节,初始航向90°;目标1的初始坐标为(2500,-4500),航速DB节,航向300°,作圆周运动;目标2的初始坐标分别为(3500,2500),航速DD节,航向210°,作直线运动。融合水面舰信号下的仿真态势图和信号波束形成结果图如图5和图6所示。
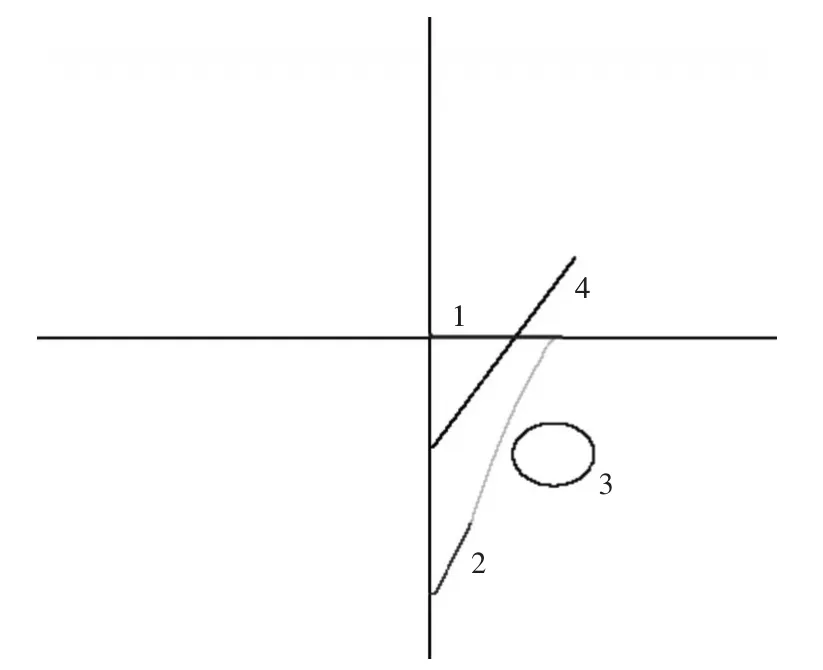
图5 运动态势图
图3 和图5为俯视图,没有体现目标运动过程中深度的变化。其中:1为表示水面舰的运动轨迹线;2为表示鱼雷的攻击过程轨迹线;3为表示目标1的运动轨迹线;4为表示目标2的运动轨迹线。
从上述两种态势的声纳基阵信号模拟测试结果图中可以看出:波束形成结果与仿真态势一致。
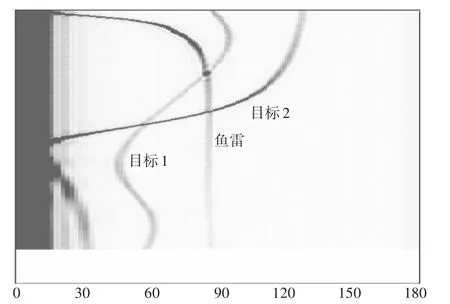
图6 信号波束形成结果
5 结语
本文介绍了某型声纳基阵信号模拟器的设计与实现过程,该模拟器对声纳基阵信号接收的运动目标的辐射噪声信号、水面舰的辐射噪声信号、海洋环境噪声信号以及流噪声信号进行仿真,并对信号传播信道进行仿真。其中的理论模型是对实际噪声的近似描述,还不是很全面,但可以体现出声纳基阵信号的基本特征,通过对产生的信号进行常规波束形成得到的结果与运动态势图进行实时比对进行验证,可以看出在一定程度上此仿真是有效的。
[1]汪德昭,尚尔昌.水声学[M].北京:科学出版社,1984:25-50.
[2]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨船舶工业学院出版社,1993:215-240.
[3]李磊,吴培荣等.矢量水听器拖曳阵的信号模拟器设计[J].应用声学,2010(1):28-35.
[4]王振华.声纳模拟器及显控软件的研究与开发[D].郑州:郑州大学,2011.
[5]赵军,张洪刚.水下目标辐射噪声高精度仿真方法[J].海军工程大学学报,2011(5):68-71.
[6]杨鹏,苑秉成.实时水中目标辐射噪声仿真技术研究[J].武汉理工大学学报,2008,32(3):492-495.
[7] Knight A.Flow noise calculations of extended hydrophones in fluid and solid-filled towed arrays[J].JASA,1996,100(1):245-251.
[8]Beerens SP.Flow noise analysis of towed sonararrays[C]//UDT:Undersea defence technology.Swanley:Nexus House.1999:392-397.
[9]赵闪,孙长瑜等.水面舰辐射噪声特性分析及实用抵消[J].声学技术,2013(2):92-95.
[10] WALES S C,HEITMEYER R M.An ensemble sourcespectra model for merchant Ship-radiated Noise[J].J.Acoust.Soc.Am.2002,111(3):1211-1231.
[11]张明敏,王平波,谈亮.拖曳声纳的本舰噪声仿真[J].系统仿真学报,2003,15(3):426-428.
[12]马徐琨.浅析水下高速航行体对转螺旋桨辐射噪声线谱建模[J].声学学报,2002,27(11):502-506.
Design and Im p lementation of Sonar Array Signal Sim ulator
QIZhengyun CHU Fuzhao
(ShanghaiMarine Electronic EquipmentResearch Institute,Shanghai 201108)
Sonar array signal simulator isan important researchmethod for the sonar signal processing algorithmsunder laboratory conditions,also is themain technicalmeans for preliminary testof the sonar property.The really degree of the signaldirectly determine whether can effective verification sonar property and new algorithms.This paper constructs a sonar array signal simulator with the digital signal processing technique and the signal processing board.The simulator can simulate the sonar array signal at differenthydrological conditions,ocean conditions and targetstate.Itcan simulate the flow noise,ocean noise and ship noise in different array form,then plus these signals with the target signal.At last,It can provide precondition to preliminary test of the sonar property and signal processing algorithms,shortening development cycle.The validity of the simulator can prove by the beam forming resultof the array signal,which simulate by this simulator.
sonararray signal,simulator,background noise
TP391.9
10.3969/j.issn.1672-9730.2017.09.029
2017年3月9日,
2017年4月28日
齐正云,女,硕士,工程师,研究方向:水声对抗系统仿真。褚福照,男,博士,高级工程师,研究方向:阵列信号处理及水声对抗系统仿真。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
水下无人系统学报(2018年5期)2018-11-09 07:40:54
电子测试(2018年14期)2018-09-26 06:04:12
舰船科学技术(2018年7期)2018-07-25 06:30:18
声学与电子工程(2017年1期)2017-06-22 11:30:07
舰船科学技术(2016年1期)2016-02-27 15:39:23
火控雷达技术(2016年2期)2016-02-06 02:29:03
