
集装箱桥吊吊具定位系统的总体设计
2017-10-21 13:11吴克锤
科技风 2017年12期
摘要:船舶集装箱这一发展形式,给起重机设备提出全新标准要求:需要设备速度快、外伸距离大、效率和质量高等。为了实现集装箱桥吊吊具最大应用目标,需要做好系统定位工作,发挥起重设备最大应用性,利用串口形式芯片编程展开实践,利用单片机开展设计工作,发现其应用效果好,确保数据和信息收集设备处于安全运作状态。本文主要就集装箱桥吊吊具定位系统的总体设计进行分析和研究。
关键词:集装箱桥吊;吊具定位系统;总体设计;分析和研究
利用单片机设备,对数据和信息处理,可以实现集装箱桥吊吊具系统远距离定位目标。驾驶人员可以利用驾驶室内存在的显示器和语音提示设备,了解集装箱桥吊吊具位置,把集装箱合理科学运作到指定位置。特别是在高空运作环节,在距离驾驶室几十米高度处,驾驶人可以准确把集装箱运作。
1 框架设计分析
集装箱桥吊吊具系统框架设计需要全面贯彻以下几个标准,实现以下不同功能。框架设计下需要实现16个线路模拟输入需求,支持24和8路数字运作输入量,利用串口形式开展通讯作业,实现输出和输入目标。整合系统中指示灯应用性,利用板块化中存在电源,确保数据和信息收集设备处于运作状态,建立异常处理机制和保护机制。详细来说,系统框架设计,在全面贯彻上述功能要求基础上,需要做好系统构建工作。在系统内容构建时,把CPU系统、电路监控系统、输入体系、采集体系、RAM体系、电源系统、ADC7109等等全部构建到系统框架设计中。在设计数据采集系统时,需要设置16个模拟采集通道,而ADC7109系统,在每次运作时,只可以利用一个通道开展采集工作。结合相应逻辑性,管理和控制电路,确保每次只可以选择一个运作线路,开展A/D转换工作。在实现转换目标后,把结果运作到单片机系统中。其次,在数据采集设备设计为24个数据输入量时,就单片机来说,其在每次数据和信息运作时,仅仅可以给出一个字节。面对单片机这一发展形势,需要充分发挥逻辑系统作用。建立在读写基础上,把逻辑输入划分为三个时间段,设置为路输入数据量。如果采集设备设置为8个输出线路,可以直接利用着八个继电设备对数据信息输出,控制和管理外部开关数目[1]。
2 系统分析和设计
2.1 系统分析
为了达到集装箱桥吊吊具定位要求,做好单片机数据传输工作和微机数据信息传输工作,首先选择满足无线接收设备需要和板块需要的器件,保证外围器件数量构建科学性。因为无线器件具有多样性特点,在选择芯片时种类较多,数量大。为了实现芯片设计科学目标,在設计师,需要了解芯片特点和应用性,关注下文几个问题。其一:在选择器件时,注意观察芯片数据信息运作形式和编码特点。利用曼彻斯特芯片开展编码设计,对编程要求高,技术确保成熟性,经验丰富,对内存和容量需求大。而且利用曼彻斯特芯片编码,数据和信息运作效率低下,和标准速率相比,是标准速率的三分之一。由此可见,利用曼彻斯特芯片编程应用效果一般。在调查和分析后,利用串口形式芯片编程展开实践,发现其应用效果好,避免曼彻斯特芯片编程效率低下弊端,例如:在集装箱桥吊吊具定位系统设计中,利用nRF401串口关联芯片,编程灵活简单,数据和信息运作效率高,标准速率就是nRF401串口关联芯片实际运作速率,开发难度小[2]。
2.2 外围原件分析
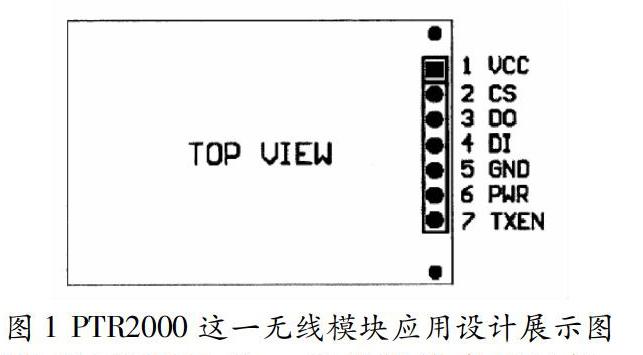
芯片外围原件首先选择合理数量,其数量选择,对系统体系和质量联系密切,关系着系统 结构性能。如果外围原件数量较多,会增加系统重量和复杂性。因此,在实际设计环节,优先选择外围原件数量合理的芯片开展接收工作。在调查和研究后,发现nRF401串口关联芯片,在外围设计中应用效果佳。nRF401串口关联芯片外围原件仅仅需要10个上下,不需要滤波器,变容管等等财务支出较多设备和元件。仅仅利用4Mz晶体,和收发天线整合应用即可。在确定好外围元件数量后,做好功耗和功率设计。因为芯片是在检测体系中,功耗消耗较为主要。因此,需要系统选择功率小板块。在相同形势和条件下,为了实现通信稳定运作目标和安全运作目标,选择发射能力好,功率高产品。其次,做好无线数据模块选择工作,保证无线模块选择科学性与合理性。例如:选择PTR2000这一无线模块,在集装箱桥吊吊具定位系统发挥积极影响。模块结构科学,属于超小类型,功率消耗小,速率高,利于实现无线接收目标。PTR2000这一无线模块其在通讯时,速率可以达到20kbit/s,在实际工作环节中,在4800bit/s和不同速率环境中,均具有实际应用性。如下图1,是PTR2000这一无线模块应用设计展示图[3]。
为了实现PTR2000这一无线模块应用目标。在利用PTR2000这一无线模块开展通讯时,在数据和信息输送前期,把整个系统板块设计为发射形式,也就是把系统设计为TXEN=1形式。设计为TXEN=1形式后,大约5ms后,就可以得到发射时间和转换时间,对不同长度和规模信息數据开展发送工作。在发送工作结束后,将系统设置为接收形式。也就是设计为TXEN=0。当PTR2000处于接收状态时,TXEN=0。这时就可以把收入到信息和数据,运作到单片系统中,运作到系统关联口处,在电平处理后,向计算机终端运输。如果PWR处于零状态。意味着PTR2000步入待机形式,其在待机形势下,不进行数据接收和发射工作。
3 电路设计
硬件电路设计集装箱桥吊吊具定位系统的硬件设计主要包括以下几点内容。
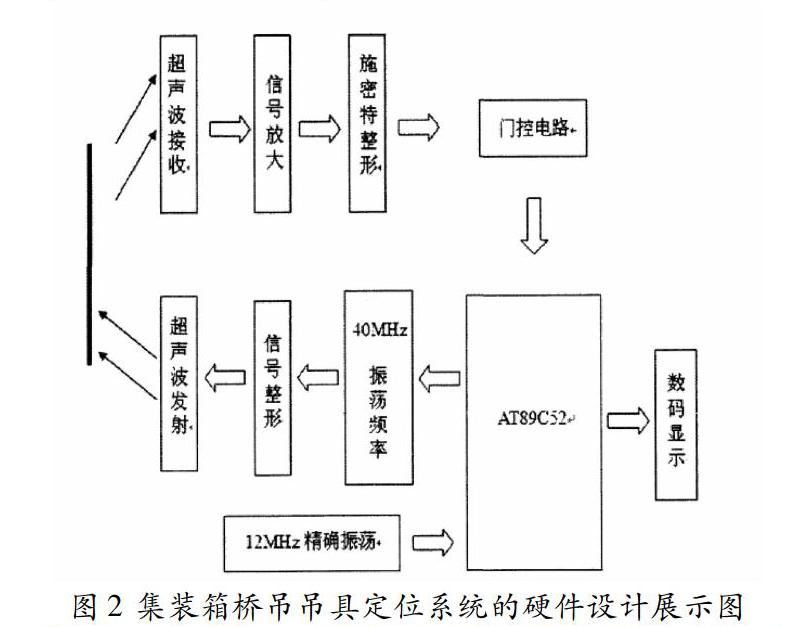
其一:就产生频率电路来说,在实际设计环节,需要确保频率输出科学性和准确性,充分利用单片机开展设计工作。由于产生频率的电路,是整个电路系统的关键和核心。因此,系统设计时,结合设计准确性来说,单片机产生频率保证处于一致条件下,不然会导致测试距离增加,出现误差,导致距离显示和实际不符合。在总体方案设计时,利用一块单片机集合电路,实现频率和信号运输目标,也可以实现电路的实际性,但是其精准度,和单片机无法比较。其次,门控设计环节,需要控制好闸门信号和现有脉冲信号,保证具备良好关联性。本文硬件电路系统单片机选择,利用AT89C52这一单片机开展设计。利用AT89C52这一单片机对软件编制,利用单片机控制外部电路,为外部系统提供信息和信号。例如:为外部系统提供频率信号、震荡信号 、数据信息处理信号等等,降低吊装外部设计难度,降低设计财务支出,经济支出合理。如下图2,集装箱桥吊吊具定位系统的硬件设计展示图。
其二:驱动电路系统设计。在集装箱桥吊吊具定位系统的总体设计时,驱动电路系统设计,在超声波设计时,超声波发射设备,产生最小电流,需要高于单片机设备电流。因此,在系统设计期间,在和UIACD4001非门系统设计时,后部位置设计一个不同级别放大电路,提高系统应用性。例如:利用一级和三级放大电路开展设计,应用性较好。在利用一级和三级放大电路开展设计时,就可以利用9018这一高频管,利于超声波发射。利用超声波的接收和发射设备,把其运作到集装箱桥吊吊具系统中,超声波发挥接收功能和发射功能,做好硬件设施安排工作,利于实现集装箱桥吊吊具定位目标。
4 结论
单片机在集装箱桥吊吊具定位系统应用,主要是结合应用人员实际需求,利用合理单片机,选择科学和适合的外围器件,构建一个稳定和安全的单片机系统。其次,需要保证设计科学性,站在集装箱桥吊吊具定位系统整体基础上,利用科学化的方法开展设计工作,优化应用系统,把不同系统和程序结合,利用固定形式,在集装箱桥吊吊具内部系统和外部系统存储设备中固定。单片机系统中,CPU处理等等设备,在一块芯片上整合,构建完善性计算机系统。利用计算机系统,对集装箱桥吊吊具实际运作监督和管理,对信号和数据信息采集和处理。需要注意的是,在数据运输环节,选择适合运输形式。例如:利用串联线路设计形式,无线数据运作形式等等,满足集装箱桥吊吊具定位系统设计需要。
参考文献:
[1]武玉升.集装箱桥吊吊具定位系统的总体设计[D].哈尔滨工程大学,2007.
[2]陈良玉.岸边集装箱起重机司机操作专家系统的设计与实现[D].上海海事大学,2006.
[3]周灌中.基于TS模型集装箱桥吊防摇控制方法的研究[D].天津大学,2006.
作者简介:吴克锤(1987),男,浙江温州人,本科,电气工程师,研究桥吊电气施工调试 。
猜你喜欢
青年时代(2017年2期)2017-02-16
法制博览(2017年1期)2017-02-14
东方教育(2016年8期)2017-01-17
海峡科技与产业(2016年11期)2016-12-26
科教导刊·电子版(2016年29期)2016-12-23
电脑知识与技术(2016年10期)2016-06-16
中国高新技术企业(2015年32期)2015-09-01
现代电子技术(2014年21期)2014-11-07
