
异步电动机直接转矩控制系统的研究与仿真
2017-10-19 20:13冯娜,郭涛
现代职业教育·高职高专 2017年11期
冯娜,郭涛
[摘 要] 针对异步电动机的直接转矩控制系统进行了Matlab/Simulink的建模与仿真研究。并在原有基础上对转速调节器进行了改进,通过对仿真波形的比较与分析,表明系统的动态性能有了很大提高,为实际的异步电机直接转矩控制系统的设计提供了思路。
[关 键 词] 直接转矩控制;Matlab;动态性能
[中图分类号] G712 [文献标志码] A [文章编号] 2096-0603(2017)31-0192-02
一、直接转矩控制的基本原理
直接转矩控制系统原理框图图1所示:
交流电经整流器整流后输出直流,为逆变器提供工作电压。电动机侧测得电压和电流值,并经3/2坐标变换成两相静止坐标系下的对应值uα、uβ、iα、iβ,然后经磁链观测器得到电机的定子磁链分量ψα、ψβ,经转矩观测器得到转矩实际值Tf。定子磁链给定值ψg和反馈值ψf比较输出偏差信号,经磁链调节器后产生磁链开关信号ψQ。转矩给定值Tg和转矩实际值Tf比较后输出的偏差信号经转矩调节器后产生转矩开关信号。通过判断、的位置可得到磁链所处扇区,此功能由扇区判断模块实现。开关信号选择模块综合三个输入信号:磁链开关信号ψQ、转矩开关信号TQ、扇区N号,产生正确的电压开关信号给逆变器,完成该闭环控制。
二、系统改进与建模
进行电机速度的控制,本质就是是对电机输出转矩的控制。要想使系统稳定运行在某一转速n1时,必须在该转速下使Te=TL,若要使系统稳定在一个比n1高的转速n2时,则首先在n1转速下使Te>TL,电机加速,当到达转速n2后,再使Te=TL,则电机就在新的转速下稳定运行了。本文采用比例积分控制器,构成转速PI调节器的无静差系统。
改进后的速度调节器模型如图2所示:
模型中利用条件模块来实现积分作用与不作用状态的切换,当转速偏差大于给定值(u值)时只接通上面的一路即只比例部分起作用;当转速偏差小于给定值时,开关接通下面一路比例积分同时作用。这样,无论转速降低或升高时均可以实现转速比例和比例积分的分离式调节,大大提高了系统的动态性能。
建立直接转矩控制系统的整体仿真模型图3:
针对常用的单相220 V交流输入三相输出的变频器,本仿真系统设计了整流和逆变电路。由单相交流220 V经倍压整流后得到约622 V的直流,并经逆变过程输出三相交流的380 V额定电压给电机,并通过磁链和转矩的配合调节实现了异步电机的直接转矩控制方法。
三、仿真结果分析
采用Simulink中simpowersystems工具箱中的已有电机模块,将其设置成鼠笼式异步电动机,仿真参数设置如下:
电机参数,极对数np=1,额定功率PN=3.73 kw,额定电压UN=380 V,额定频率f=50HZ,定子电阻Rs=1.115 ?赘,转子电阻Rr=1.083 ?赘,定子漏感LS=0.005974 H,转子漏感lr=0.005974 H,定转子互感Lm=0.2037 H,轉动惯量J=0.02 kg·m。
调节器参数设置如下:
kp=0.4,ki=2,eo=500 r/min,磁链给定值为1.5 wb,磁链滞环比较器容差εψ为0.01 wb,转矩滞环比较容差εm±1N·m。
定子磁链仿真波形如图4所示:
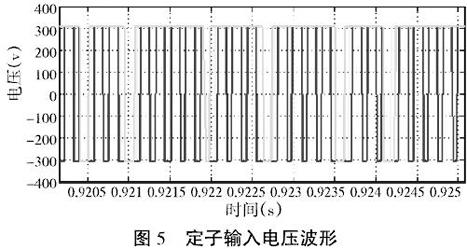
定子输入电压仿真波形如图5所示:经电压型逆变电路,为定子提供的电压波形。
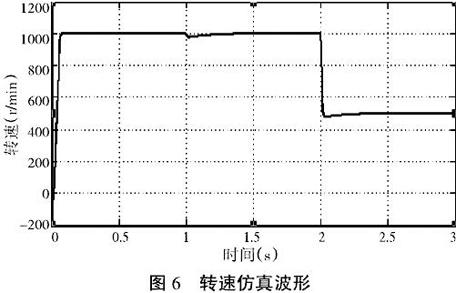
转速仿真波形如下:
仿真情况:在1s后负载转矩由10 N·m增加到
20 N·m,2s后转速由1000 r/min降到500 r/min,得到
的转速波形如图6所示:
可以看到,由于积分器的作用转速基本上是无静差的。通过调节转速PI调节器的比例与积分参数,使得转速上升速度较快且基本上无超调。当1s加负载后转速有所下降但很快跟随到给定,而且由于负载转矩已变所以实际速度和给定值有较小的差值。当调节给定速度时,系统虽然有一个笑得超调,但也在很短的时间内进行跟随。
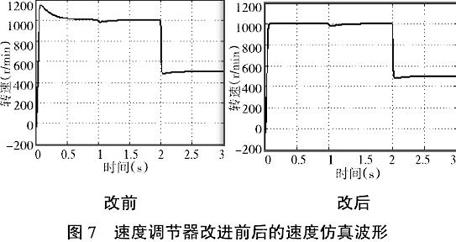
速度调节器改进前后转速的仿真波形如图7所示:
可以看出速度调节器改进后,系统的超调量明显减小甚至消失,表明了积分分离式PI调节器的优越性,而且结果表明转速的波动性减小,提高了系统的稳
定性。
可以看出该仿真模型实现了对异步电机的直接转矩控制,得到了理论分析中的定子磁链近似圆形的轨迹,并在设定的加减转速的情况下能很好地跟随给定变化,表明本实验采用的直接转矩控制系统具有较好的稳态和动态性能。经比较分析后由仿真结果可以看出经过转速调节器的改进,系统的动态性能提高了,在原有基础上达到更好的静动态性能。
四、总结
本文介绍了一种基于Matlab的异步电动机直接转矩控制系统仿真模型,并对转速调节器进行了改进。在仿真调试过程中,通过反复调节PI调节器的参数进行匹配使系统的动态响应达到较好的状态,而且对直接转矩控制技术有了更深层次的理解。仿真结果表明各仿真波形符合理论分析,系统能够平稳运行,具有较好的静动态性能。
参考文献:
[1]李华德.交流调速控制系统[M].北京:电子工业出版社,2003.
[2]黄永安,马路,刘惠敏.MATLAB7.0/Simulink6.0建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.
[3]张德丰.MATLAB/Simulink建模与仿真[M].北京:电子工业出版社,2009.
[4]潘晓晟,郝世勇.MATLAB电机仿真精华50例[M].北京:电子工业出版社,2007.
猜你喜欢
科学家(2022年3期)2022-04-11
科技创新与应用(2020年15期)2020-05-21
电机与控制学报(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
魅力中国(2016年52期)2017-09-01
科技创新导报(2017年7期)2017-06-03
科技与创新(2015年10期)2015-07-07
计算技术与自动化(2014年1期)2014-12-12
科技经济市场(2014年10期)2014-11-27
少年文艺·少年读者文摘(2014年1期)2014-02-27
