基于爬行运动的脊柱康复训练仪的设计*
2017-10-18 01:39肖阳徐秀林
生物医学工程研究 2017年1期
肖阳,徐秀林
(上海理工大学医疗器械与食品学院,上海 200093)
1 引 言
如今脊椎病已经成为中老年人的多发病,且趋于年轻化。有研究显示[1],现在由于青少年生活、学习、工作习惯不好,造成了青少年脊柱侧弯症发病率高达25%[2],我国仅上海脊椎病发病率高达13.7%[3],国外有些国家脊椎病的发病率大约在40%左右[4],因此,对于脊椎病的康复治疗非常迫切。人体脊柱具有支撑躯干,吸收震荡,保存脊髓,保护内脏等作用[5]。一个好的脊椎对于人们的身心健康起着至关重要的作用,可是现在人们上班工作大多是坐姿或者站姿,而且坐姿不标准且坐立时间较长,极易导致脊椎关节错位压迫神经、腰椎间盘突出以及附着在脊椎上的器官受到损伤而引起疾病[6-7]。科学家研究发现,爬行动物由于长期进行爬行运动,所以很少患有脊椎病[8-9]。有大量调查研究表明,爬行训练能有效治疗腰肌劳损、坐骨神经痛、颈椎病等脊柱相关的疾病[10]。但是进行爬行运动时有很多不便,如场地限制。而且对于患有严重脊柱病的患者根本不能自主爬行。因此,许多爬行器应运而生,爬行器对场地要求不高,在家里就可以进行爬行运动。
国外对爬行运动训练设备的研究较早。在70年代中期Tidwell[11]等发明了身体协调性训练装置,该装置具备三种爬行模式:双臂和双腿同时前后往复运动;同侧手臂和腿同时前后往复运动;对侧手臂和腿同时前后往复运动,实现训练儿童或肢体脊柱患者肢体运动的协调性。1989年,Iams[12]等发明了爬行运动装置,Canela[13]等上世纪90年代设计的残疾儿童运动训练装置是一款专为肌肉运动障碍的儿童设计的运动训练装置。在我国,有关爬行运动对脊柱的康复临床作用研究较早,但没有适合脊柱病康复的被动训练仪。但也有一部分研究人员设计出了不少爬行训练机[14-15],虽然功能不够完善,但也算是一个开端。目前市场上的爬行器产品功能比较单一,且以主动运动的健身器械为主,不利于脊椎病较严重的患者使用。针对上述缺陷,本研究设计了一套俯卧式多态脊柱康复训练与评估系统,为脊柱侧弯等脊柱疾病患者提供多种模式的人体俯卧式脊柱康复训练。
2 机械设计
该俯卧式多态脊柱康复与评估系统主要分为爬行训练装置主体、控制主机和控制软件三部分。训练装置主要包括上肢爬行机构、下肢爬行机构、腹部支撑机构、摆尾机构、升高机构等。结构见图1。
2.1 上、下肢爬行机构
由于需要进行摆尾运动,所以采用上下肢运动机构分体设计。爬行机构分为下肢爬行机构(见图2)和上肢爬行机构(见图3)。上肢把手和下肢腿托都是通过滚珠丝杠模组驱动的,被动运动时,上肢把手和下肢腿托通过插销片连接模组上的滑块,在滚珠丝杠传动机构的驱动下做往复运动。为了保证滚珠丝杠的刚度,在其两侧安装有导杆,并在其上方安装有支撑板,在把手和腿托下方各安装有四个尼龙滚轮。主动运动时,插销片拔起,上肢把手和下肢腿托与滚珠丝杠传动机构脱离。为了防止把手与腿托左右运动,在支撑板上开一个槽,在槽两侧安装直线滑轨,并配有小滑块。把手和腿托固定连接在小滑块上。为了适应不同身高的患者,腿托后侧脚蹬通过插销固定,插销拔起可调节腿托的长度,根据文献[16]选择腿托调节范围为400~600 mm。被动运动时,在滚珠丝杠的带动下,同侧上下肢运动方向相反,左右两肢的运动方向也相反,如此协调往复运动,模拟爬行运动。

图1训练装置整体结构
1.腹部支撑机构 2.上肢爬行机构 3.下肢爬行机构 4.摆尾机构 5.升高机构
Fig1Overallstructureofthetrainingdevice

图2 下肢爬行机构

图3 上肢爬行机构
2.2 摆尾机构
摆尾运动是此训练系统的一大亮点,此功能可以帮助不能自主进行扭腰运动的患者进行较小幅度的扭腰运动。这样可以刺激到相关神经和肌肉,从而促进患者大脑皮质重组恢复扭腰的能力。摆尾机构是通过一个曲柄滑块机构来带动下肢支撑板绕转动轴左右摆动,见图4。曲柄滑块机构安装在下肢支撑板的中间位置,转动轴在支撑板前面,支撑板后面通过支撑台来支撑,支撑台上安装有牛眼以减小左右摆动时的摩擦力。运动时,患者跪在腿托上,俯卧在腹部支撑上,双手抓住把手保持稳定,曲柄滑块机构带动下肢支撑板摆动从而带动患者进行扭腰运动,摆动角度为-12°~12°,此角度不宜过大以免造成运动损伤。

图4摆尾机构
1.转动轴 2.牛眼 3.曲柄滑块机构 4.支撑台
Fig4Waggingtailinstitution
2.3 腹部支撑机构
结构中创新引入腹部支撑及调节机构,实现在不同程度减重下进行多种模式的训练,适合脊柱病较严重的患者进行初期康复训练。腹部支撑位置可以前后、上下调节,以适应不同要求的患者。此机构由三部分组成前后调节机构、高度调节机构、托腹板,见图5(a)。前后调节机构是一个直线滑轨与滑块的配合,滑轨上开有槽口,滑块侧边安装有固定夹,调节时按开夹子,调好后松开夹子,这样夹子就会夹紧在滑轨的槽口里了,其放大结构见图5(b)。高度调节机构是安装在滑块上面的,此机构是齿轮齿条配合。拔起插销,拧动齿轮,齿条可以上下运动以调节合适的高度,调好后放下插销,机构就固定住了。托腹板是通过连接块固定在齿条顶端的,其与连接块之间安装有压力传感器,这样就可以测出减重程度,有利于医生对患者康复状况进行评估。高度调节范围为295~415 mm。
2.4 升高机构
攀高爬行、俯式爬行是两种比较特殊的脊柱康复训练模式,且强度比较大不太适合脊椎病严重的患者。为了实现这两种运动模式,在系统中加入了升高机构。在侧梁的两侧各安装了一个升高机构。升高机构以滚珠丝杠模组为传动机构,通过柱形滑轨与侧梁上固定的直线滑轨机构相连,滚珠丝杠由伺服电机带动。当需要进行攀高爬行时,前侧的升高机构将运动平台前侧整体抬高,与地面最大倾角为20°,后侧升高机构保持不动,见图6。进行俯式爬行时,前、后升高机构运动情况对调。

图5(a) 腹部支撑机构;图5(b)锁定机构
Fig5(a)Abdominalsupportmechanism;Fig5(b)Lockingmechanism
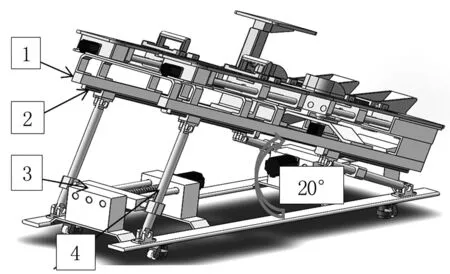
图6升高机构
1.侧梁 2.直线滑轨机构 3.滚珠丝杠模组 4.柱形滑轨
Fig6Raisingmechanism
3 运动学分析
由于没有加工实物,所以下面通过仿真软件对训练装置的主要运动进行仿真,从而得到一些运动数据,方便控制电机的选择,也有利于对训练装置进行结构的优化设计。
3.1 上下肢运动机构
通过对已有爬行机进行测绘,设定上下肢运动机构可运动的最大距离分别为545 mm和450 mm。正常人行走的速度为1 m/s,人在跪姿时腿长相对缩短了一半,所以爬行速度取0.5 m/s,由于运动时左右相对运动,所以正常单边速度为0.25 m/s,由于是被动运动而且患者行动能力差,所以速度不宜过快以免造成运动损伤,综合考虑,最高被动运动速度定为0.2 m/s,患者最高重量按100 kg算,四肢分别承重25 kg,以上肢运动为例,手把重量为2 kg,导轨摩擦系数为u=0.1,患者在被动运动时,四肢与支撑板的角度会不断变化,会产生轴向负载,轴向最大负载按患者四肢与支撑板成45°角时计算。
F=250/√2+(250/√2+20)×0.1=196 N取200 N进行计算。
将上肢运动机构导入SolidWorks Motion模块进行运动仿真。仿真结果见图7(a)、7(b)。

图7(a) 上下肢运动机构马达角速度
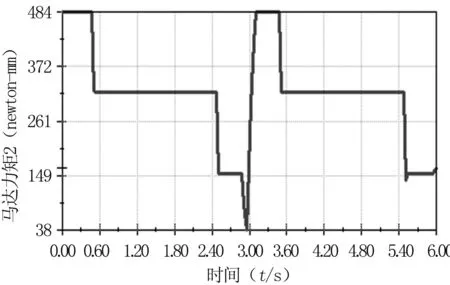
图7(b) 上下肢运动机构马达转矩
Fig7(b)Themotortorqueofupperandlowerlimbsmovingmechanism
3.2 升高机构
此机构主要用于构造运动角度,实现俯式爬行和攀高爬行。由于运动模式单一,所以选择普通电机即可。将升高机构导入SolidWorks Motion模块进行分析。在丝杠上添加旋转马达,转速见图8(a),在两个支撑杆上添加竖直向下的力F=1 000 N,经仿真得出旋转马达力矩变化见图8(b)。由图可知运动速度较慢,但是所需转矩还是很大的,为以后电机选型提供了参考。
3.3 摆尾机构
此机构电机转速不高但对于转矩要求比较高。仿真时,在曲柄上添加旋转马达M,马达转速恒定为12 RPM,根据运动平台和人体下肢的总重量500 N,滚动摩擦系数按u=0.05来算,得出摩擦阻力F=25 N。仿真算出马达力矩见图9,马达最大力矩为6.813 Nm,此数值对于一般步进电机来说还是很大的,所以在保证电机尺寸合适的基础上,又要满足大力矩、慢转速,还是较难选择的。因此采用减速增力装置与电机配合带动摆尾机构运动。
4 有限元分析
分析整个运动系统的受力情况,升高机构为主要受力机构,其中支撑杆和导杆为主要受力部件。升高机构承担了患者及上、下肢运动机构的全部重量,根据国民体质监测公报以及人机工程学相关数据显示[15],我国成年男性平均体重为67.8 kg,成年女性平均体重为59.6 kg,加上上下肢机构及侧梁的重量,考虑安全性,将分析重量设计为400 kg。由于支撑杆有4个,所以平均每个承重100 kg。对以上部件采用ANSYS Workbench进行应力、变形量的分析,从而判断其是否满足强度和刚度要求。

图8(a) 升高机构马达角速度
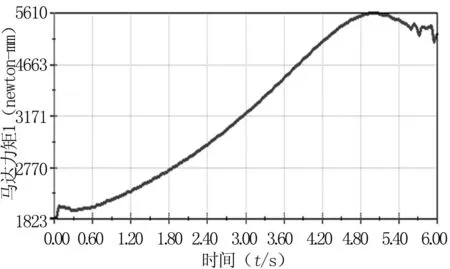
图8(b) 升高机构马达转矩
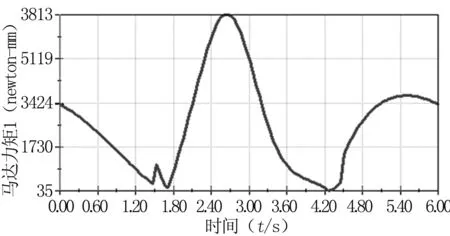
图9 摆尾机构马达转矩
4.1 升高机构支撑杆的受力分析
由于受力较大,选择普通碳钢,其各种属性见表1。
在装配体中,支撑杆的下端与底座铰接在一起,中间部分与滚珠丝杠模组通过套筒连在一起,所以选择简单支撑约束支撑杆的下端,约束掉支撑杆的所有线性位移自由度,但旋转自由度是自由的。中间部分采用圆柱面约束,选择约束掉面径向、切向位移。支撑杆上端与侧梁是铰接在一起的,受力方向竖直向下,给其上端施加集中力1 000 N,选择通过分量定义此力,方便控制力的方向。本零件的分析结果选取典型的等效应力和变形量色带表达图,支撑杆的应力图见图10(a),变形量色带图见图10(b)。由图可知,应力、变形量最大点都为铰接处,且最大应力为5.129 MPa,远小于普通碳钢的屈服强度220.594 MPa,所以满足强度要求。最大变形量为0.00102 mm,满足刚度要求。计算结果表明支撑杆满足使用要求。
表1 普通碳钢的属性

图10(a)支撑杆应力分析图10(b)支撑杆变形量分析
Fig10(a)StressanalysisofthesupportbarFig10(b)Analysisoftheamountofdeformationofthesupportrods
4.2 升高机构导杆受力分析
由于受力较大,对材料刚度要求较高,所以选择轴承钢GCr15,其各种属性见表2。

表2 轴承钢GCr15的属性
在装配体中,导杆的两端是固定在支撑台上的,所以导杆的两端采用固定约束。由于当滑块运动到导杆中间时,其形变最大,经过计算此时导杆所承受的力为1804 N,方向竖直向下,所以添加集中力1804 N在导杆中间,选择通过分量定义此力,方便控制力的方向。导杆的应力见图11(a),变形量色带图见图11(b)。由图11(a)可知,应力最大点都为两端固定处,且最大应力为31.33 MPa,远小于普通碳钢的屈服强度518.42 MPa,所以满足强度要求。由图11(b)可知,导杆中间的变形量最大,最大变形量为0.11 mm,满足刚度要求。计算结果表明支撑杆能满足使用要求。
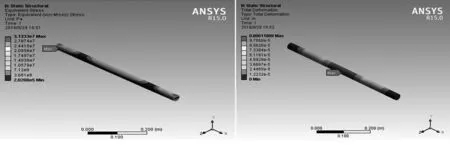
图11(a)导杆应力分析图11(b)导杆应变分析
Fig11(a)StressanalysisofguiderodFig11(b)Strainanalysisofguiderod
5 结果与讨论
本设计是基于爬行运动的脊柱康复训练仪,其最大优点就是运动模式多样化。在被动运动模式下,可以实现跪撑爬行、攀高爬行、俯式爬行、扭腰摆动;在主动运动模式下,可以实现跪撑爬行。该设计还有运动数据反馈的功能,方便医生进行评估。不过由于功能多样,所以结构比较复杂,导致训练仪整体偏重,不利于搬运。在以后的研究中可以精简结构,而且随着材料科学的发展,可以选择更轻便的材料,从而减轻训练仪整体的重量。还有该设计主动运动模式过于单一,以后可以加入抗阻模式,从而可以满足更多患者康复后期的要求,通过不同阻力的加入,让主动运动变的更加具有挑战性。
猜你喜欢
机械设计与制造工程(2022年1期)2022-02-19
橡塑技术与装备(2021年23期)2021-12-13
模具制造(2019年10期)2020-01-06
装备机械(2019年4期)2019-12-26
制造技术与机床(2019年11期)2019-12-04
华北理工大学学报(自然科学版)(2017年4期)2017-11-29
中国新闻周刊(2017年23期)2017-07-12
中国机械工程(2017年12期)2017-07-03
通信电源技术(2016年1期)2016-04-16
深圳职业技术学院学报(2015年5期)2015-11-30