
基于电流跟踪控制法的比例电磁阀驱动控制系统
2017-10-18 09:42蔡胜年王玉川庞宝麟
沈阳化工大学学报 2017年3期
蔡胜年, 王玉川, 庞宝麟
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
基于电流跟踪控制法的比例电磁阀驱动控制系统
蔡胜年, 王玉川, 庞宝麟
(沈阳化工大学 信息工程学院, 辽宁 沈阳 110142)
在分析电流跟踪控制器参数变化对比例电磁阀流量滞环影响的基础上,设计了一种简单、可靠的比例电磁阀驱动控制系统.以比例电磁阀驱动电流脉动量作为控制目标,通过改变电流跟踪控制器的滞环宽度来精确地控制比例电磁阀的流量滞环.以STC12C5A60S2单片机为核心器件设计了比例电磁阀电流跟踪PWM控制系统,并通过比对实验,验证了该控制算法应用在比例电磁阀流量控制上的实用性.实验证明:该系统具有控制精度高、价格低廉、操作简单、运行稳定等特点.
电流跟踪; 比例电磁阀; 脉动量; 脉冲调制
比例电磁阀[1]阀芯的静摩擦力是引起流量(压力)滞环的主要原因之一,脉宽调制驱动电压作用在比例电磁阀线圈时将使驱动电流产生脉动量,驱动电流的脉动量能够使比例电磁阀的移动铁芯产生相应的颤振效果,使移动铁芯运动时的静摩擦变成动摩擦,从而减小流量滞环.比例电磁阀的开环PWM控制系统虽然能够产生颤振效果,但是对颤振量的大小不能够自动调节和控制,系统的控制精度低,抗干扰性能差,控制性能不能满足系统要求.由电流、流量(或压力)构成的双闭环控制系统,虽然可以获得较好的控制效果,但是需要增设流量传感器构成流量反馈环,系统结构复杂,故障率增加,成本高.本文采用电流跟踪PWM单闭环控制方法,以滞环比较器的环宽作为主要控制参数,根据系统的工作压力和流量,优化计算比例电磁阀驱动电流脉动量[2]所要求的滞环宽度,从而有效地控制流量滞环宽度,提高系统的动、静控制性能.本文设计的比例电磁阀电流跟踪单闭环控制系统,能够提高驱动电流控制精度,而且具有操作简单、运行稳定、流量(压力)滞环量小(滞环宽度可以控制在5 %以内)等优点.
1 比例电磁阀电流跟踪控制

比例电磁阀的驱动电流波形和PWM电压波形如图2所示.在比例电磁阀的电流跟踪PWM控制系统中,给定电流为直流电流信号,滞环控制器的环宽根据比例电磁阀的入口、出口压差Δp及流量Q及滞环控制函数f(Δp,Q)确定最优滞环宽度,滞环控制函数是基于比例电磁阀在各工况下的实测数据建立的,事前经过优化计算后,确定f(Δp,Q),并存入单片机中.
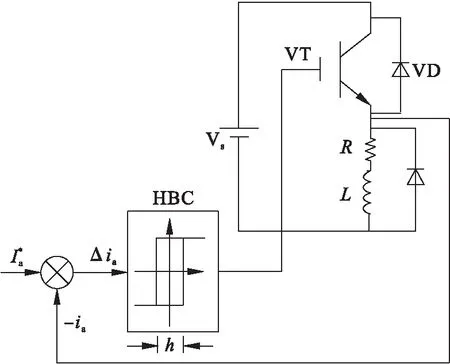
图1 电流滞环跟踪控制原理图

图2 比例电磁阀线圈理想的电压电流波形
2 电流跟踪PWM控制系统
2.1 比例电磁阀基本控制方程
当IGBT导通时,电压平衡方程:

(1)
当IGBT关断时,电压平衡方程:
(2)
式中:U—直流电源电压[V];Ron(IGBT)—IGBT的电阻[Ω];Ron(VT)—二极管的电阻[Ω].在公式(1)、(2)中,Ron(IGBT)和Ron(VT)相对于与R相比,可忽略不计.
比例电磁阀的移动铁芯在运动过程中的受力过程比较复杂.在线圈电流i建立的磁场中,由经典虚位移法,得电磁力计算公式:

(3)

当比例电磁铁在线性工作区时,具有良好的驱动电流-电磁力特性关系,其数学模型可近似为如下线性表达式:
Fm=Ki·i
(4)
式中:Ki—比例电磁阀的电流增益;i—驱动电流[A];Fm—电磁铁线圈在衔铁上的作用力[N].
当线圈电流产生如图2所示的脉动ΔI时,电磁力的变化量为:
ΔFm=Ki·ΔI
(5)
在比例电磁阀中流量方程主要与压力P及阀口截流面积Av、流量系数Cq、流体密度ρ等因素有关,具体公式为:

(6)
电磁阀工作过程中的流体运动方程:
(7)

阀芯上升的运动方程:
(8)
阀芯下降的运动方程:

(9)
式中:m—动铁芯质量[kg];Fm—电磁力[N];Fp—液压力[N];Fw—稳态液动力[N];f—摩擦力[N];Fy—弹簧预紧力[N];c—阻尼系数[N/(m·s-1)];k—弹簧刚度[N/m];x—弹簧位移[m](动铁芯位移).
由公式(4)、(5)可知随着线圈电流的脉动,电磁力也随之脉动,移动铁芯受力发生变化,从而使位移产生ΔS大小的颤振量.这个颤振量的大小对比例电磁阀流量(压力)滞环产生较大的影响.由此,可以通过控制驱动电流的脉动量ΔI的大小来控制移动铁芯位移ΔS,从而得到不同的控制效果.
PWM控制能够使移动铁芯产生位移颤振,颤振量的大小直接影响比例阀流量滞环特性,采用电流跟踪控制方法,可以将驱动电流脉动量ΔI作为被控参数,通过改变滞环控制器的环宽h(即优化计算得到的f(Δp,Q)),可以有效地控制驱动电流脉动量ΔI的大小,实现对移动铁芯位移颤振量ΔS精确控制,将输出流量的滞环宽度控制在最小范围内.
2.2 控制参数的设计
求解电压方程可得驱动电流脉动量ΔI的公式如下[4]:
(10)
式中:D—占空比(D=ton/T)[%];U—输出电压[V];R—比例电磁阀的线圈电阻[Ω];T—PWM驱动电压的开关周期[s];τ—比例电磁阀时间常数.
比例阀的驱动电流脉动量呈指数上升或指数下降的形式,如图2所示,由于τ=L/R,比例阀的时间常数近似为定值,在不考虑功率器件内阻及电路结构的影响时,同一个比例电磁阀驱动电流脉动量的上升、下降的斜率也是近似相同的.当比例电磁阀的压力、流量确定后,滞环控制器的环宽就确定了,作为被控对象的驱动电流脉动量的大小也就确定了,而PWM驱动电压的驱动频率f和占空比D由滞环比较器的环宽来自动确定.
对实测值与建模得到的计算值的适合性进行检验,采用最大误差emax及公式(11)、(12)计算估计标准误差s及平均相对误差绝对值emape.估计标准误差值越小,表明实际值越紧靠估计值,得到结果越好;而平均相对误差绝对值可以作为综合度量所建模型对样本观测值的指标,它的取值越小,所建立的模型越准确.本文只考虑比例电磁阀主要工作区间的平均相对误差绝对值.
(11)
(12)
2.3 电流跟踪PWM控制系统的实现
电流滞环跟踪控制的控制精度高,响应快,且易于实现[5].传统的电流跟踪系统大都采用硬件电路控制,对硬件电路和开关器件的开关频率都有一定的要求,且成本较高.本文设计的电流跟踪系统如图3所示.

图3 电流跟踪系统框图
系统采用STC12C5A60S2单片机为核心,利用整数式滞环控制器实现电流跟踪控制,通过设置PCAPWM控制寄存器产生PWM波,对比例电磁阀驱动电流进行电流跟踪控制.控制系统的硬件结构如图4所示.
由单片机输出频率、占空比可调的PWM信号,通过光耦的光电隔离之后,与驱动电路相连,控制MOS管的导通、关断来实现比例电磁阀的电流跟踪PWM控制[6].采用单片机与驱动电路结合的硬件电路可靠性好,性能高,成本低.
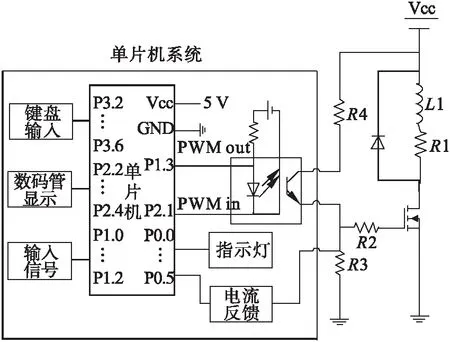
图4 控制器系统结构
系统软件主要包括主程序和中断程序两部分.主程序首先是初始化,然后进入系统主循环,完成电流跟踪计算及PWM控制,并不断刷新指示状态、调用显示和按键扫描子程序,并进行报警识别(是否需要报警,若需要报警则调用报警及保护程序).在A/D中断程序中完成驱动电流采样和滤波,见图5.

图5 主程序流程
3 实验结果
实验中所用比例电磁阀参数如表1所示,控制器参数如表2所示.

表1 比例电磁阀参数

表2 控制器参数
通过改变滞环控制器环宽h控制驱动电流脉动量的大小,测取流量滞环曲线,并与在直流电流驱动、单闭环PI电压驱动进行比对,在上述条件下的比对结果分别如图6和图7所示.
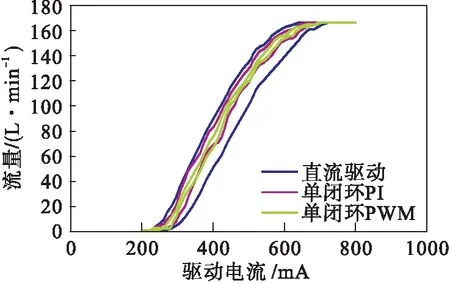
图6 三种控制方式的滞环曲线

图7 三种控制方式的滞环量
滞环比较:由图6和图7可以看出,比例电磁阀电流跟踪PWM控制系统的流量滞环量(<5 %)明显小于直流电流驱动和单闭环PI电压驱动的流量滞环量,滞环量与平均滞环量均得到明显减少.
线性度比较:电流跟踪PWM控制系统流量滞环的线性度明显优于单闭环PI电压驱动流量滞环的线性度.
4 结 论
在不同的压力和流量及流量滞环情况下,为了保证在不同压力、不同流量下均能实现流量滞环最小,需要根据压力和流量调整比较器的滞环宽度,以实现电流脉动量的最优控制效果.本文提出了一种把电流滞环跟踪应用在比例电磁阀PWM控制系统的新算法,这种算法能够有效地减小比例电磁阀流量(压力)滞环,明显改善死区现象.通过实验证明,这种方法能够提高流量滞环的线性度,死区情况有所改善,系统的鲁棒性更强.
[1] 吴勇,杨喜晶,刘广治,等.伺服阀控非对称缸的压力跃变分析与仿真[J].液压气动与密封,2011,31(7):30-33.
[2] CAI S N,YING Z,PANG B L,et al.Research on the Relationship between Drive Current Pulsating Quantity of Proportional Solenoid Valve and Flow Hysteresis[DB/OL](2012-12-08)[2015-07-03]http://ieeexplore. ieee.org/document/ 64289791.
[3] 王伟超,王银河.基于反卷积计算的 BLDCM电流跟踪控制器设计[J].广东工业大学学报,2010,27(4):81-84.
[4] 朱玉田,唐兴华.脉宽调制中的颤振算法[J].机械工程学报,2009,45(4):214-218.
[5] 武迪,赵继敏,蒋鹏.基于电流跟踪型PWM技术的数字式步进电机细分驱动技术[J].电工技术,2009(8):66-68.
[6] 陈斌,杨安平.电液比例阀控制系统的研究设计[J].微型机与应用,2012,31(7):82-84.
Abstract: In this paper,a simple and reliable proportional solenoid valve drive control system is designed,which is based on the analysis of the influence of the change of the current tracking controller parameters on proportional solenoid valve flow hysteresis.The current fluctuation of proportional solenoid valve is used as the control target,and the flow hysteresis width of the proportional solenoid valve can be controlled accurately by changing the current hysteresis width of the tracking controller.The proportional solenoid valve current tracking PWM control system was designed using STC12C5A60S2 microcontroller as the core component.The practicability of this control algorithm in the application of the proportional electromagnetic valve flow control was verified through the comparison of experiment.The experimental results showed that the control system has high precision,low price,simple operation,stable operation characteristics.
Keywords: current tracking; proportional electromagnetic valve; pulsating quantity; pulse modulation
TheDriveControlSystemofProportionalSolenoidValveBasedontheCurrentTrackingControlMethod
CAI Sheng-nian, WANG Yu-chuan, PANG Bao-lin
(Shenyang University of Chemical Technology, Shenyang 110142, China)
10.3969/j.issn.2095-2198.2017.03.016
TP271
A
2015-07-14
蔡胜年(1957-),男,江西乐平人,教授,博士,主要从事电磁技术应用方面的研究.
2095-2198(2017)03-0273-05
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
汽车技术(2021年5期)2021-05-24
照明工程学报(2020年1期)2020-06-16
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
电子制作(2017年14期)2017-12-18
现代电子技术(2015年20期)2015-10-26
舰船科学技术(2015年8期)2015-02-27
汽车与新动力(2014年5期)2014-02-27
