基于正交试验的航行体弹道仿真优化设计
2017-10-18 02:22边晓阳赵修平李显龙朱长波
海军航空大学学报 2017年4期
边晓阳,赵修平,李显龙,朱长波
(海军航空工程学院a.研究生管理大队;b.飞行器工程系,山东烟台264001)
基于正交试验的航行体弹道仿真优化设计
边晓阳a,赵修平b,李显龙a,朱长波a
(海军航空工程学院a.研究生管理大队;b.飞行器工程系,山东烟台264001)
为确保水下发射航行体再入水后弹道安全,分析了航行体弹道影响因素,构建了带有阻尼板航行体的弹道数学模型,将发射后航行体与发射载体的最近距离作为安全性判定标准,采用正交试验方法,对水下航行体的阻尼板数量、尺寸及张开角度3个参数进行了仿真优化分析。仿真结果表明:当阻尼板数量为6块、长度为800mm、张开角度为80°时,水下发射航行体质心z方向侧移量最大,航行体尾端与发射载体假想壁距离最大,安全性最高。
正交试验;阻尼板;弹道设计;仿真优化
某水下发射航行体是以训练为目的设计的一型产品,由于功能的要求,在航行体发射出水后需要回收使用。航行体不具备动力推动装置,发射出水后将在重力的作用下回落到水中[1]。为了防止航行体回落到水中后发生触碰发射载体的危险,可以在航行体尾部一侧加装阻尼板来保证航行体对发射载体的安全,阻尼板与航行体的相对位置如图1所示(以8块阻尼板为例)。
航行体水下发射出筒后张开阻尼板,见图2,在水流载荷和转动力矩的作用下进行减速并改变弹道方向,使得出水速度减小攻角增大,进而增大回落水后与发射载体的距离,保证航行体对发射载体不构成碰撞威胁[2]。阻尼板的装配数量、尺寸大小以及张开角度[3]3个参数的改变都会对航行体的回落弹道产生影响,所以也就存在一个关于3个参数的最优方案,该方案可以使得航行体弹道对于发射载体的安全距离达到最大。本文采用正交试验的方法对阻尼板数量、尺寸、张开角度3个参数进行合理匹配,最终得到安全性较高的弹道参数优化方案。
1 航行体弹道数学模型
1.1 坐标系的定义
在计算航行体的弹道过程中使用到2个坐标系:发射坐标系和航行体坐标系,如图3所示[4]。
图3中,发射坐标系为惯性参考系,主要用来确定航行体质心在运动中的坐标位置以及航行体在运动过程中的姿态、速度等。坐标系原点o位于发射瞬时航行体质心,x轴沿发射载体纵轴,指向其头部,y轴沿过坐标原点的铅垂线,指向天空,z轴由右手法则确定。航行体坐标系固结在航行体上,为动坐标系。坐标原点o0位于航行体质心所在横截面与航行体纵轴的交点,x0轴沿航行体纵轴,指向弹头为正,y0轴在航行体纵对称面内,与x0轴垂直,z0轴由右手法则确定。
设发射坐标系到航行体坐标系的转换矩阵为:
则航行体坐标系到发射坐标系的转换矩阵为:
1.2 航行体受力分析
1.2.1 作用在航行体上的力和力矩
在计算航行体的弹道轨迹时,首先要分析作用于航行体的力和力矩。其中,作用于航行体的力有流体动力、重力、浮力、阻尼板阻力等。作用于航行体的力矩有流体动力矩、浮力力矩、横向力矩、阻尼板阻尼力矩等,下面列出了相关受力方程[5-8]:
1)横向力及力矩[9]:根据细长体理论,全湿航行体所受横向力及力矩为:
式(3)中:积分上限xA为航行体头部的x坐标;下限xT为航行体尾部的x坐标;ρ为流体介质的密度;d(x)为沿x轴处的航行体直径;Cd为粘性系数;Vy0和Vz0为航行体的速度分量。
2)净浮力及浮力矩:
式(4)中:
3)阻尼板阻力及阻尼力矩:
式(7)、(8)中:fi为单块阻尼板的受力方程;Fi为所有阻尼板对航行体的合力方程;α为阻尼板的张开角度;Cd1为阻尼板阻尼系数;Sb为阻尼板面积;n为阻尼板数量;β为阻尼板之间的夹角;xbi、ybi、zbi为舵板阻力作用点,并且:
式(9)中:xT为弹尾x坐标;R为弹体最大半径。
将流体动力和力矩分解到航行体坐标系中,其表达式为[10]:
式(10)中:Cx1、Cy1和Cz1为流体动力因数;mx1、my1和mz1为流体动力矩因数;q为流体动压力;S为航行体的最大横截面积;L为航行体的长度。
综上,航行体受到总的外力和外力矩为:
1.2.2 航行体的附加质量
附加质量在出入水会发生改变,精确地计算附加质量十分复杂[11]。在仿真计算中,为了简化模型,空中弹道假设只受重力作用,水中弹道不考虑空泡对其的影响,所以在水中的弹道过程中附加质量导数均为0,在出入水阶段各项附加质量导数与轴向浸水长度的时间导数成比例,可以用以下公式进行近似求解:
1.3 航行体运动方程组的构建
1.3.1 运动学方程
1)航行体质心的运动学方程。航行体相对于发射坐标系的位置为(x,y,z),速度分量为,航行体的速度在航行体坐标系中3个轴的分量为(vx0,vy0,vz0),根据航行体坐标系到发射坐标系的转换关系得到[12]:
2)航行体转动的运动学方程。航行体的转动由偏航角ψ,俯仰角θ和横滚角γ这3个姿态角(欧拉角)决定,则航行体的欧拉角角速度为。
设航行体的角速度ω在航行体坐标系中的投影为(ωx0,ωy0,ωz0),根据坐标系转换关系,有:
1.3.2 动力学方程
分别利用动量定理和动量矩定理在航行体坐标系上建立动力学方程[13]:
式(15)、(16)中:G为航行体和周围流体的总动量;H为相对于航行体坐标系原点o0的总动量矩;ω是航行体的角速度矢量;V是航行体的平移速度矢量;F和M分别是航行体所受的外力和外力矩而G和H可以用系统的惯性张量和速度矢量的点积表示出来[14],即
式(17)中:U=(vx0,vy0,vz0,ωx0,ωy0,ωz0)T是6维速度矢量的转置列矢量;A=[Aij]6×6是附加流体质量系数矩阵;M=[Mij]6×6是弹体惯性系数矩阵,其表达式为:
式(18)中:m是弹体质量;Jij(i,j=1,2,3)是弹体转动惯量;(xc,yc,zc)是质心坐标。
由式(17)与式(18)可以得到G和H的分量表达式:
由式(15)、(16),可以得到如下分量形式的运动微分方程组:
以上方程组可整理成:
式(21)中:
将航行体所受的外力、外力矩以及附加质量代入式(21),通过对运动方程组公式的计算,可得到含有6个未知变量在内的6个方程。利用迭代计算的方法,先计算出6个未知变量,当时间间隔Δt取足够时,可以认为6个变量在Δt内为一定量,以此为基础求得下一时刻的位置坐标、姿态角参数,并作为下一次的初始值进行计算。如此反复迭代,从而得到每一时刻的位置坐标以及姿态角参数。
2 约束条件及求解方法
2.1 初始条件
航行体的质量设定为30t,发射速度为30m/s,发射深度为25m,发射载体始终保持静止状态,阻尼板的数量、尺寸以及张开角度参照正交试验分配表中的具体数据,利用Matlab软件进行仿真计算[15]。迭代时间步长为2ms,通过改变不同的初始输入参数来得到弹道特征点数据。
2.2 安全性判据
航行体发射再入水后向发射载体的侧向运动,将发射载体简化为无限长柱体。航行体再入水后由于浮心靠近头部方向,所以入水后很快将处于直立姿态,因此弹尾所处位置最深。判定航行体弹道是否安全的依据为:根据弹道轨迹在ZY平面的投影,找出航行体离长柱体圆截面中心最近的点。航行体发射再入水后尾端离假想壁的最近距离,即为判断航行体对发射载体安全性的标准。
2.3 求解方法
航行体弹道仿真的整体求解方法采用逐步细化的思想,见图4。
将弹道分成5个阶段进行分步求解,其中除了第一阶段外,每一阶段的初始状态紧接上一个阶段的结束状态,而且每个阶段基本相似,只是在求附加质量和附加质量导数,以及各个水动力分量时,各阶段的情况稍有不同。因此,某一阶段的求解流程见图5。
3 航行体正交试验方案
航行体在发射过程中,阻尼板对于其弹道改变起到了很大的作用。阻尼板的数量、尺寸以及张开角度的不同都一定程度上改变着弹道轨迹,对发射载体的安全性也会产生影响。阻尼板设计涉及到多因素水平的影响,采用正交试验[16]选取一种经济性强、安全性高以及生产工艺较为简单的设计方案。
正交试验是一种工程界广泛使用的试验设计方法,以拉丁方理论和群论为理论基础,通过合理安排多因素的有限次试验,获取各因素、各水平的全排列组合,是一种优良的试验设计方法。共涉及包括阻尼板数量、尺寸以及张开角度在内的3个因子,每个因子分别有3个水平(1,2,3)。采用正交试验可以将仿真试验次数由27次减少到9次[17-19]。其中,8块阻尼板布置如图1所示,7块阻尼板布置在图1的基础上去掉8#阻尼板,6块阻尼板布置在图1的基础上去掉8#阻尼板和7#阻尼板。
因子水平与实际参数对应关系见表1,9种匹配方案见表2。
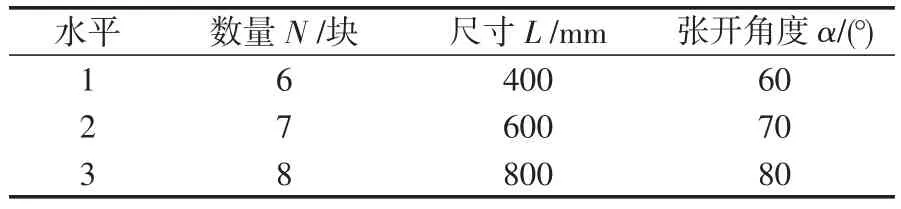
表1 因子水平表Tab.1 Factor level array

表2 正交试验表Tab.2 Orthogonal test array
4 航行体弹道轨迹仿真分析
通过仿真分析得出了9个方案航行体质心下沉距水面深度、z方向最大侧移量、航行体尾端离假想壁的最近距离结果,如表3所示。

表3 航行体正交试验仿真结果Tab.3 Simulation result of vehicle Orthogonal test
通过表3可以直观看出,正交仿真试验中方案3的航行体尾端与假想壁距离最大,安全性最高,表明在装置了6块阻尼板,每块阻尼板长度为800mm、张开角度为80°时安全性最高。结合数据分析原因,方案3中的下沉深度与其余方案相差不大,但是z方向偏移量最大,最终使得航行体离假想壁距离最远。进一步分析表中数据可以看出,在阻尼板数量相同的前提下,阻尼板长度为800mm、张开角度80°的安全性要普遍好于长度为400mm、张开角度60°的方案,而阻尼板长度为400mm、张开角度60°的安全性也要普遍好于长度为600mm、张开角度70°的方案。
5 结论
根据航行体水下发射出水后,在重力作用下重新入水的弹道特性,建立了完备的弹道数学模型。通过对正交试验中的9个子方案进行仿真分析,得到了不同阻尼板参数下的质心最大下沉深度、质心z方向最大侧移量、航行体尾端离假想壁的最近距离等弹道特征数据结果。其中,z方向的侧移量是影响航行体与发射载体距离的主要因素,方案3中的阻尼板方案可以更好地保证航行体对发射载体的安全。
[1]李四超.航行体舵板张开特性研究与分析[J].海军航空工程学院学报,2016,31(4):475-479.LI SICHAO.Research and analysis for opening property of the rudder on underwater vehicle[J].Journal of Naval Aeronautical and Astronautical University,2016,31(4):475-479.(in Chinese)
[2]葛晖,张宇文.潜射导弹运载器分离体砸艇概率仿真建模[J].西北工业大学学报,2005,23(1):23-27.GE HUI,ZHANG YUWEN.Modeling and simulation of the probability of submarine launched missile carrier smashing the submarine[J].Journal of Northwestern Polytechnic University,2005,23(1):23-27.(in Chinese)
[3]都军民,孙卓.舵板张开过程的数值仿真与试验研究[J].机械科学与技术,2013,32(3):426-429.DU JUNMIN,SUN ZHUO.Numerical simulation and test research on rudder opening course[J].Mechanical Science and Technology for Aerospace Engineering,2013,32(3):426-429.(in Chinese)
[4]齐强,陈志刚,周源.航行器水中运动数学模型及数值仿真[J].舰船科学技术,2014,36(5):80-83.QI QIANG,CHEN ZHIGANG,ZHOU YUAN.Mathematical model and simulation for underwater motion of vehicle[J].Ship Science and Technology,2014,36(5):80-83.(in Chinese)
[5]李延军,郭凤美,董利强.水下飞行器的弹道仿真[J].导弹与航天运载技术,2009(6):1-4.LI YANJUN,GUO FENGMEI,DONG LIQIANG.Trajectory simulation of underwater vehicle[J].Missile and Space Vehicles,2009(6):1-4.(in Chinese)
[6]马亮,杨小小,杨继锋.潜射弹道导弹水中段航行姿态优化仿真研究[J].计算机仿真,2016,33(6):5-8.MA LIANG,YANG XIAOXIAO,YANG JIFENG.Simu-lation of underwater trajectory optimization for submarine launched ballistic missile[J].Computer Simulation,2016,33(6):5-8.(in Chinese)
[7]侯二虎,张宇文,蔡帆.潜射运载器尾部分离体水下运动仿真[M].计算机仿真,2012,29(8):31-34.HOU ERHU,ZHANG YUWEN,CAI FAN.Simulation of underwater motion of tail separation section of submarine launched missile carrier[M].Computer Simulation,2012,29(8):31-34.(in Chinese)
[8]方宁,宋召青.潜载垂直发射导弹水下弹道建模与仿真[J].海军航空工程学院学报,2010,25(3):311-314.FANG NING,SONG ZHAOQING.Model and simulation for the underwater trajectory of submarine based vertical launched missile[J].Journal of Naval Aeronautical and Astronautical University,2010,25(3):311-314.(in Chinese)
[9]李杰,鲁传敬,陈鑫.附着空泡对潜射导弹弹道影响分析[J].弹道学报,2014(3):54-58.LI JIE,LU CHUANJING,CHEN XIN.Analysis on influence of attached cavity on the trajectory of submarine launched missile[J].Journal of Ballistics,2014(3):54-58.(in Chinese)
[10]宋海龙.水弹道建模与仿真方法研究[D].哈尔滨:哈尔滨工业大学,2014.SONG HAILONG.Water trajectory modeling and simulation method research[D].Harbin:Harbin Institute of Technology,2014.(in Chinese)
[11]廖保全,冯金富,徐保伟.附加质量变化率在航行体出水过程中的影响研究[J].计算力学学报,2017,34(1):95-100.LIAO BAOQUAN,FENG JINFU,XU BAOWEI.Influence on rate of change of added mass for an underwater vehicle during its water exit process[J].Chinese Journal of Computational Mechanics,2017,34(1):95-100.(in Chinese)
[12]严卫生.鱼雷航行力学[M].西安:西北工业大学出版社,2005:106-115.YAN WEISHENG.The torpedo sailing mechanics[M].Xi’an:Northwestern Polytechnic University Press,2005:106-115.(in Chinese)
[13]黄寿康.流体动力·弹道·载荷·环境[M].北京:宇航出版社,1991:406-415.HUANG SHOUKANG.Fluid,ballistic,load,environment[M].Beijing:Astronautics Press,1991:406-415.(in Chinese)
[14]李杰,鲁传敬.潜射导弹尾部燃气后效建模及数值分析[J].弹道学报,2009,21(4):6-8.LI JIE,LU CHUANJING.The model of combustion gas bubble of submarine launched missile and numerical simulation[J].Journal of Ballistics,2009,21(4):6-8.(in Chinese)
[15]薛定宇,陈阳泉.高等应用数学问题的Matlab求解[M].北京:清华大学出版社,2004:209-217.XUE DINGYU,CHENG YANGQUAN.The Matlab solving of advanced applied mathematics problem[M].Beijing:Tsinghua University Press,2004:209-217.(in Chinese)
[16]董丽,邢同超,周淑芳.基于正交试验的汽车引擎盖外板成形工艺参数优化[J].锻压技术,2016,41(11):62-65.DONG LI,XING TONGCHAO,ZHOU SHUFANG.Optimization of forming process parameters for automobile engine cover based on orthogonal experiment[J].Forging Stamping Technology,2016,41(11):62-65.(in Chinese)
[17]王玄静.正交试验设计的应用与分析[J].兰州文理学院学报,2016,30(1):17-22 WANG XUANJING.Application and analysis of the orthogonal test design[J].Journal of Lanzhou University of Arts and Science,2016,30(1):17-22.(in Chinese)
[18]岳玉娜,王增全,吴艳.基于正交试验方法的导弹保温舱盖运动控制参数优化[J].导弹与航天运载技术,2017(1):70-74.YUE YUNA,WANG ZENGQUAN,WU YAN.Control parameters optimization of missile heat container motion based on orthogonal experiment method[J].Missile and Space Vehicles,2017(1):70-74.(in Chinese)
[19]杨奇松,王伟,李庆霞.基于正交实验的弹道导弹射程灵敏度参数分析[J].指挥控制与仿真,2016,38(2):115-119.YANG QISONG,WANG WEI,LI QINGZHEN.Ballistic missile range sensitivity parameter analysis based on orthogonal experiments[J].Command Control and Simulation,2016,38(2):115-119.(in Chinese)
Simulation and Optimization Design of Vehicle Trajectory Based on Orthogonal Text
BIAN Xiaoyanga,ZHAO Xiupingb,LI Xianlonga,ZHU Changboa
(Naval Aeronautical and Astronautical University a.Graduate students’Brigade;b.Department of Airborne Vehicle Engineering,Yantai Shandong 264001,China)
To ensure that the underwater launch vehicle is safe when it enters water again,the influence factor of vehicle trajectory was analyzed,then the mathematical model of a vehicle with rudder was constructed and took the nearest dis⁃tance between the vehicle and the launch vehicle as the safety criterion,by using the orthogonal test,the three parameters of rudder,size and opening angle of underwater vehicle were simulated and optimized.The simulation results implied that when the number of the rudder is 6,the length of that is 800mm,and the opening angle is 80 degrees,the centroid of under⁃water vehicle is the biggest in direction z,the distance of the vehicle tail and the imaginary wall of launch vehicle is also biggest,and the safety is the highest.
orthogonal test;rudder;trajectory design;simulation optimization
TJ02
A
1673-1522(2017)04-0365-06
10.7682/j.issn.1673-1522.2017.04.005
2017-05-06;
2017-06-12
边晓阳(1993-),男,硕士生。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
数字海洋与水下攻防(2020年5期)2021-01-04
南京大学学报(数学半年刊)(2020年1期)2020-03-19
诗潮(2019年10期)2019-11-19
电子制作(2019年7期)2019-04-25
北方工业大学学报(2019年5期)2019-03-30
东坡赤壁诗词(2018年3期)2018-07-16
读者·校园版(2018年13期)2018-06-19