基于FBG的深海沉积物孔压观测设备研究❋
2017-10-17 07:04:32柴万里
中国海洋大学学报(自然科学版) 2017年10期
刘 涛, 柴万里, 郭 磊
(1. 山东省海洋环境地质工程重点实验室,中国海洋大学 山东 青岛 266100; 2.青岛海洋科学与技术国家实验室海洋地质过程与环境功能实验室, 山东 青岛 266061)
基于FBG的深海沉积物孔压观测设备研究❋
刘 涛1,2, 柴万里1, 郭 磊1
(1. 山东省海洋环境地质工程重点实验室,中国海洋大学 山东 青岛 266100; 2.青岛海洋科学与技术国家实验室海洋地质过程与环境功能实验室, 山东 青岛 266061)
随着深海资源的开发,深海沉积物稳定性越来越受关注,原位孔压观测技术作为深海沉积物参数获取的有效手段应当获得足够重视与研究。本文在总结国内外深海沉积物孔压原位观测探杆的基础上,结合FBG传感技术,设计研制一套基于FBG的深海沉积物超孔压观测设备,并开展了近海测试。观测位置海床面下1.5 m处,平衡孔压高达5.01 kPa。测试期间,其中埋入沉积层0.5 m深处传感器准确获取潮汐作用于海底沉积物的超孔压数据,与当地潮汐数据对比,两者相位差为T/4。
深海沉积; 孔隙水(气)压力; 长期原位观测; FBG; 潮汐作用
国家对自然资源特别是石油、天然气等的需求不断增加,导致近海活动愈加频繁。为了应对日益增长的能源需求,越来越多的近海以及深海工程结构物将投入使用。了解海底沉积物稳定性影响因素,确定不稳定区域以及潜在地质构造作用,阐明地质过程,是工程师设计海洋结构物的必要条件。
有效应力作为控制土体平衡条件的重要条件,是工程师研究关注的重点。孔隙压力作为土体重要的力学参数,能够对有效应力进行解释分析。同时,相对于其他土力学参数,孔隙压力无方向性也给土体性质研究带来便利。对于各向异性非均质土体,孔隙压力用来表现土体性质在原位观测中优势更加明显[1]。因此,孔隙压力在现代土力学研究中具有重要作用,在确定沉积物性质方面有着理论和实践上的重要意义。原位观测作为最直接、准确的沉积物性质参数获取手段,原位孔隙压力观测的研究也一直是海洋地质领域的重点。然而,国内在原位孔压观测技术方面的发展起步较晚,并未形成系统的技术方案,因此,发展原位孔压观测技术研制深海沉积物超孔压观测设备必定能为建设海洋强国贡献力量。
本文在总结国际先进技术经验的基础上,结合现有技术,提出原位孔压观测设备设计方案并加工样机;利用该设备获取现场原位测试数据,分析该设备用于沉积物长期原位观测的可行性,并对接下来的研究工作进行展望与指导。
1 研究背景
流体作用力在地质过程中起到的影响逐渐获得研究人员的重视,原位孔隙压力数据更加具有显著的意义。1960年代起,国外便已开展海洋沉积物孔压的原位观测研究。1967年的威尔金森盆地海湾地质调查,将NGI-UI孔压传感器成功地布放在水深278 m处[2-3],获得有效的超孔压数据;SEASWAB I调查期间,Bennett和Burns[4]采用复合压力传感器在密西西比三角洲地区进行了为期8个月的长期原位孔隙压力观测,但其中大量数据未能获得有效的解释;1981年在密西西比三角洲原位测试中,桑迪亚国家实验室[5]使用GISP进行了为期5个月的孔压观测。此外,多个国家海洋科学研究机构均对原位孔压监测技术进行了深入研究,牛津大学Sills等人[6]研制的OU差压传感器在英国的海洋地质调查中获得广泛应用;比利时岩土工程研究所[6]研制的复合孔压计在对波浪潮汐所引起的孔压监测方面也收获了相应成果;英国海洋科学研究所自主研发的PUPPI[7]通过原位观测,总结获得有效的孔隙水渗流速率测算方式;法国海洋开发研究所(Ifremer)所研制的Piezometer系列设备工作水深能达6 000 m,可以代表目前国际深海孔压观测研究的前沿,在Niger Delta、NW Sumatra等地区已经取得较多的试验成果[8-11],并进行了产品商业化推广应用。
大部分原位孔压监测设备均需要面临以下潜在的问题,如时间滞后、分辨率与量程的矛盾、精度较低、原位校准等,以上所有问题均会影响测量数据的准确性。目前传感器精度提高主要通过采用差压测量的方式解决,而这一解决方式也会随之带来由于传感器单向开放而引起的测量时间滞后以及原位校准的问题。
总结国内外孔压原位观测装置的基础上,结合现有技术,提出更加稳定高精度的孔压原位观测技术方案,对提高我国海洋技术具有重要意义。
2 设备设计研制
国际上海底沉积物孔隙压力原位观测装置多为孔隙压力探杆,并且已有40余年的研究应用经验[12]。英国海洋科学研究所研制的PUPPI作为早期原位孔压装置,成功地将孔压探杆应用到5 500 m水深的海底沉积物孔隙压力测量[6]。PUPPI是一套包含数据记录舱、声学控制系统、配重、探杆以及孔压传感器的原位观测装置。其实现压差的方式为,传感器一端通过液压流体配重与海水耦合,另一端直接与环境压力相耦合,因此探杆内使用的液压流体为吸湿的高密度有机物。在E. E. DAVIS等[13]的应用中,传感器的采集频率已达10 Hz。PUPPI采用自重贯入的方式,同时其探杆锥尖采用4 mm的液压管进行环境液体压力测量。法国海洋研究院Sultan[9]在PUPPI的基础上设计研制自重式孔隙压力探杆Piezometer,同样采用压差传感器单向测量环境液体压力进行孔隙压力测量。目前深海沉积物孔隙压力测量装置所面临的技术问题主要是电学传感器的水下密封,因此考虑是否可以采用非电学传感器,降低传感器的密封要求,简化设计结构。
本套基于FBG的超孔压观测探杆(In-situ excess pore pressure observation instrument based on FBG,以下简称:FBG-PPI),利用光纤光栅传感技术的耐腐蚀以及电绝缘特性,设计开放式感压装置,以期实现海底原位长期稳定的动态孔压观测。FBG-PPI主要由孔隙压力探杆、耐压舱两部分组成,其结构示意图如图2所示。孔隙压力探杆内嵌入压差传感器用来实现贯入沉积层中,感测沉积层内超孔隙压力;而耐压舱用于存储信号解调、数据采集以及控制单元。孔隙压力探杆与耐压舱为分离式,探杆需要专门的贯入系统以实现贯入沉积层中。耐压舱则可根据实际应用搭载到贯入设备上或者直接放置在海床表面,方便观测结束后回收。针对不同的地质条件,可以选择回收或者抛弃探杆。
压差传感器采用光纤光栅传感技术设计,基于光纤光栅传感器防水耐腐蚀的特性,将传感器设计为双向开放模式,即沉积层的流体静力直接作用感测压力的传感部件。两个相互隔绝的进水通道实现压差测量。传感器最大外径为45 mm,透水石外径45 mm,透水石厚度5 mm。目前传感器的最大量程设计为0.1 MPa,精度可达0.1%F.S.,即0.1 kPa。每个压差传感器单独设置温度补偿单元,用于降低深海动态环境下的温度变化对光纤光栅传感器测量精度的影响。具体实现方式为在传感器感测光纤刻设专门感测温度的相位光栅,获得温度相位光栅引起的中心波长变化量λB2,从而对感测压力的相位光栅引起的中心波长变化量λB1进行温度补偿校准。光纤光栅压差传感器的工作原理示意图见图1。
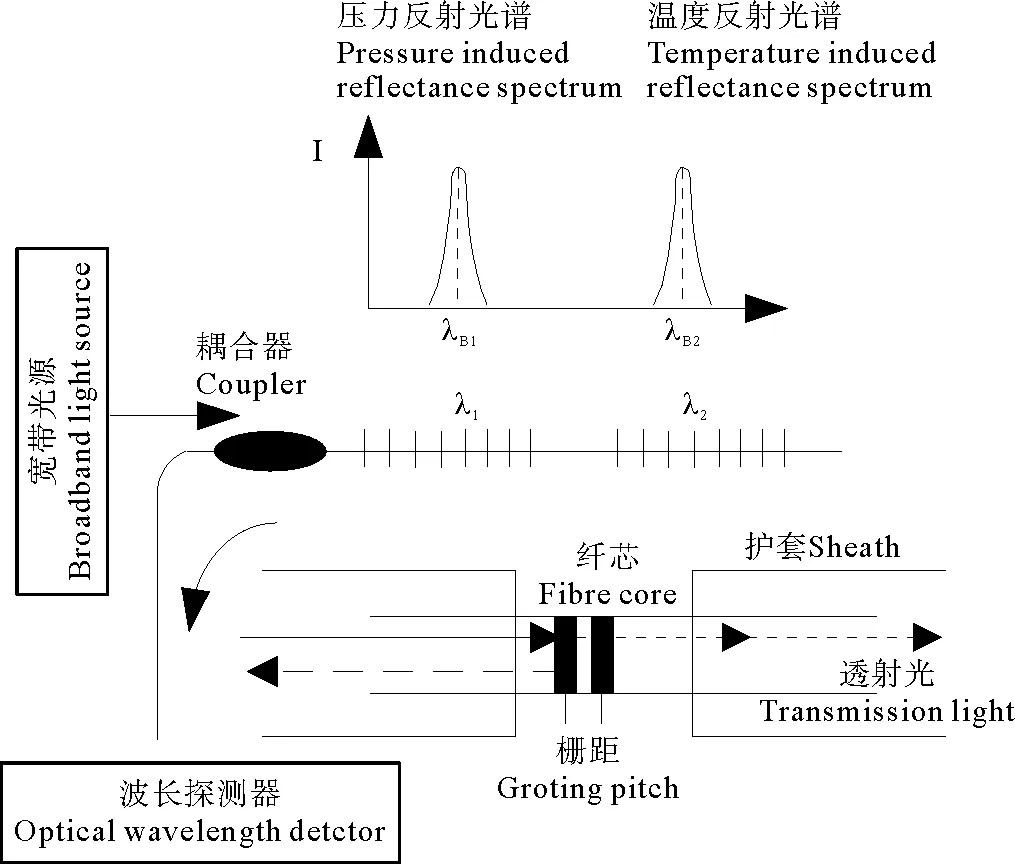
图1 光纤光栅压力传感器工作原理Fig.1 FBG pressure sensor work pattern
传感器通过连接套管进行连接,实现多个传感器的串联,连接杆材质为316L。连接套管贯通海水,实现传感器内部压力通道与海水静压力相贯通的目的。连接套管外径60 mm,最大内径50 mm,并在侧壁对称分布2个5 mm的通孔,用于实现对沉积环境静水压力的贯通与感测。连接杆内在通孔上下两侧设置密封圈,用来隔绝内部静水环境与沉积环境,从而实现沉积层内压差测量。
孔隙压力探杆设计全长3.5 m,探杆内部每隔1 m设置一个压差传感器,锥尖参考静力触探设备设置为60°夹角。海水通过探杆顶端法兰盘的出线口进入。法兰盘出线口的传感器传输线通过光纤水密连接器进入分离式耐压舱,将光纤传感信号导入耐压舱内的光纤光栅传感器解调模块,进行传感信号的解调分析。本套设备采用的是MacArtney四芯FCR光纤水密连接器,能够满足6 000 m水深环境要求。
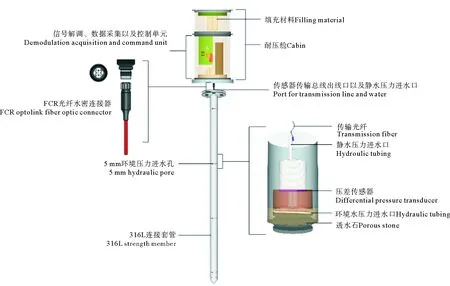
图2 FBG-PPI结构示意图Fig.2 FBG-PPI structure sketch表1 光纤光栅传感器解调模块参数Table 1 Fiber bragg grating sensor demodulation module parameter

参数类型Character参数值Parameter每通道可测传感器数量≤32个反射光检测动态范围60dB解调波长分辨率0.1pm解调速度(跟随模式)≥20Hz(单个传感器)解调速度(固定模式)≥2Hz实时输出数据波长扫描反射光频谱FBG传感器中心波长、峰值光通道接口FC/APC适配器通讯接口RS232,RS485(可选)供电电源+12V/2A(电压范围+7~36V)储存温度-10~80℃工作温度-5~45℃外形尺寸290mm长×135mm宽×85mm高
光纤光栅传感器解调模块是一个由PC机控制的、高分辨率的光纤布拉格光栅传感器解调系统及高精度的光谱分析系统。该解调模块内置了快速可调谐激光光源模块,通过改变可调谐光源的输出波长,扫描FBG传感器的反射光强度谱线,计算出FBG传感器的中心波长,再根据传感器的波长响应特征参数计算出检测点的温度、应力变化等物理参数。
3 设备岸滩测试
海洋沉积物孔压观测设备的长期稳定性以及数据可靠性,是原位动态观测过程中需要克服的主要问题。本套FBG-PPI为验证系统的稳定以及传感器原位观测性能,进行了为期一周的近岸原位测试。
3.1 测试过程
本次测试,FBG-PPI搭载由中国海洋大学自主研制的复杂深海工程地质原位观测设备(In-situ surverying equipment of engineering geology in complex deep sea,以下简称:SEEGEO)的贯入系统进行原位观测。测试地点为近岸码头平稳海床面处,底质基本为淤泥。测试地点最大水深约15 m。
孔隙压力探杆通过静力贯入系统贯入沉积层中,贯入速度为0.5 m/行程,设计最大贯入力1.5 t。其中FBG-PPI的供电系统由SEEGEO的海水电池供应,整套设备的水下采集控制由SEEGEO的总控系统提供。设备通过折臂吊吊入水中,直至设备完全坐底后,折臂吊释放装置,稳定后由SEEGEO上位机控制系统通过水声通信机发送指令,控制设备贯入,并进行FBG-PPI采集控制。设备完成4个行程的贯入,实现FBG-PPI的孔隙压力探杆贯入深度约2 m,经潜水员下水查看,设备自重陷入约0.5 m,因此孔压探杆实际贯入深度为2.5 m。设备进行为期一周的连续观测,数据自容存储。
目前设备定时采集所能达到的最大采集频率为每隔5 min测量一次,连续采集记录50 s,解调仪所能达到的最大解调频率为1 Hz;50 s内设备的采集模块能够达到稳定状态。设备贯入以及孔压消散初期阶段,为实现孔压值的全时段测量,提高测量精度,采用最大采集频率工作模式。而后12:00~16:00期间,将采样频率调整为每隔10 min连续采集一次,期间通过水声通讯回收部分数据。而后的时间内,设备处于自动化采集存储阶段,因此,需要将其设置为低功耗模式,采集频率需要增大,但是为了满足原位测量的精度需求,采样频率设置为每隔20 min采集一次。贯入当天,共进行了两次自容采集存储模式调整,即针对不同阶段,设置的孔压数据采样频率不同。
完成测试任务后,设备起吊,将历史数据通过控制系统导出。
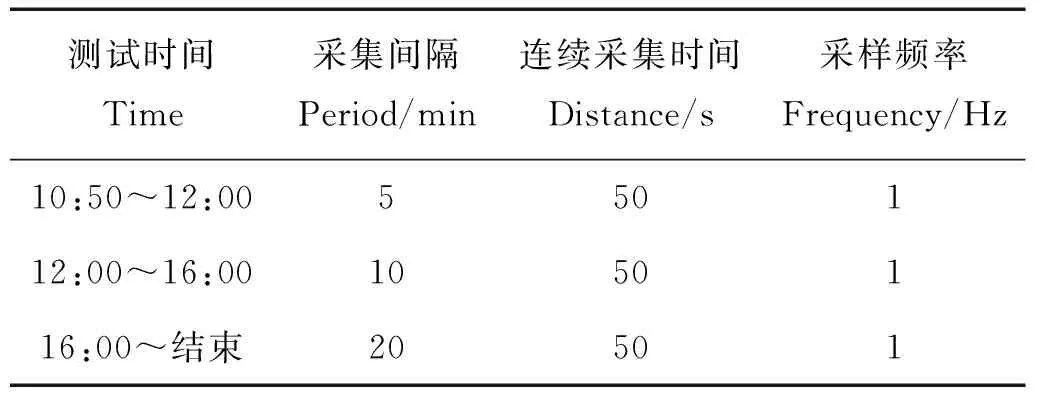
表2 测试期间采样频率
3.2 测试数据
孔隙压力探杆在本次测试过程中,实际埋入沉积物中的深度大于2 m,即其中3个压差传感器完全埋入沉积层中,另一个传感器暴露在海水中。传感器相对位置关系如图4,传感器部分数据曲线见图5。其中1#传感器在贯入过程中失效,未能返回有效数据。
数据采集控制单元存储的历史数据共约27 000余条,记录了孔压探杆贯入以后直至探杆拔出期间孔压变化全过程。在回收了有效数据的传感器中,3#、2#传感器记录了海床表面以下0.5 m以及1.5 m的沉积层孔压变化现象。4#传感器完全暴露在海水中,实际压差值应为零,在本次测试过程中,也检出4#传感器出现大于传感器精度的震荡变化,尤其是在贯入结束初期,4#传感器也出现了类似于2#、3#传感器的孔压消散曲线,不过时间较短,约30 min后,4#传感器便从峰值恢复至平均值0.81 kPa,并在之后的时间内在0.81 kPa上下波动,4#传感器在稳定测试期间的方差约为0.18 kPa,在传感器精度范围内。

图3 贯入装置Fig.3 Penetration device

图4 测试期间传感器相对位置Fig.4 Spot of transducers
为更加直观准确地分析本次近海测试的数据,将数据按照时间段以及显著的变化趋势进行划分,主要包括达到平衡孔压之前及之后的潮汐作用下沉积物超孔压变化现象。
4 数据分析
海底沉积物超孔压的变化主要受流体静力以及地质作用两方面的影响。本次岸滩测试选取的测试地点为港湾码头,不会出现大型的地质构造作用,因此,数据分析时主要考虑流体静力对沉积层超孔压的影响。即在此主要讨论由探杆挤土作用所引起的累积超孔压自然消散的过程,以及潮汐作用引起的超孔压变化。本次数据分析选取的均为孔压探杆连续采集阶段的中值。
4.1 平衡孔压数据分析
探杆贯入对沉积层的扩孔作用,会导致孔隙压力的快速累积,随着时间的推移,孔隙压力逐渐消散,直至静力平衡状态。不同的沉积环境(渗透速率、沉积深度)所对应的孔压消散稳定时间均不相同,然而实际情况下,这种平衡孔压状态不可能完全抵达。评估孔压原位观测探杆平衡孔压恢复状态是检验装置性能的重要方法之一。
贯入结束后,由贯入扰动引起的超孔隙压力达到峰值,其中2#、3#传感器超孔压峰值分别为8.89 kPa、8.46 kPa。4#传感器在贯入结束后也出现峰值波动,峰值约为0.81 kPa。图5中数据显示贯入结束后8h内的压差时程曲线,该时间区域内,2#、3#传感器反馈的数据表现为超孔压持续消散,在5.5 h后逐渐趋于稳定状态。
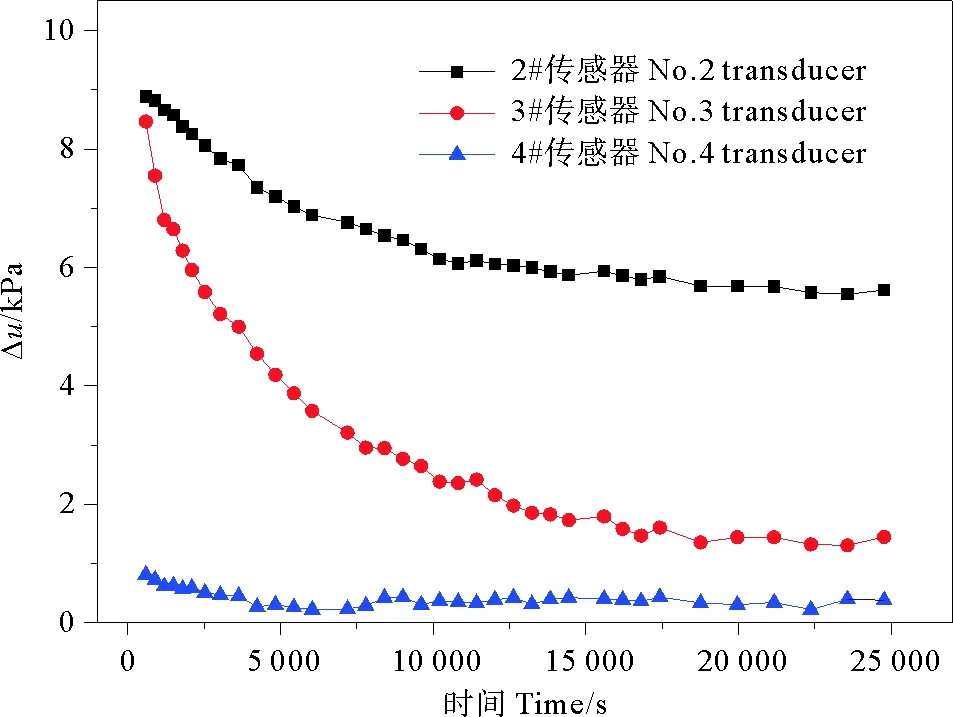
图5 贯入后8 h内的超孔压数据Fig.5 8 h excess pore pressure data after penetration
为进一步探讨孔隙压力探杆的原位观测适用性,参考Davis等[13]提出的原位观测孔隙压力探针的平衡孔压的推算方法,进行了本套装置贯入后的平衡孔压推算。具体方式为绘制压差-时间倒数曲线,推算1/time=0时的超孔压值。并结合Sultan等[9]的实践应用,选择3.5 h(此后的压差随时间倒数基本呈线性变化)处做曲线的切线,获取相应的截距,即为平衡孔压推算值。该方法可用于短期原位观测探杆的平衡孔压推算。平衡孔压经验推算值以及5.5 h后实测孔压稳定值如图6所示。
3#传感器的平衡孔压推算值约为-1.09 kPa,实测数据显示平衡孔压为1.10 kPa,相差2.19 kPa。2#传感器的平衡孔压推算值约为5.39 kPa,实测数据显示平衡孔压为5.01 kPa,相差0.38 kPa,约为0.4倍的传感器精度。
4.2 潮汐作用
除了周围环境引起的沉积物孔隙压力变化以外,潮汐作用引起的孔压变化结合孔压探杆在贯入过程中所引起的孔压变化,也能提供相应的水文地质信息。本次测试期间潮汐作用于沉积层内压差的关系曲线见图7。贯入当天18:00以后的自容存储压差数据显示,2#传感器超孔压数值有一个明显的剧增现象,而后呈现出不规则的锯齿状变化,并呈现出整体衰减趋势。3#传感器观测记录的超孔压值呈现循环周期性变化的现象。下面将该时期3#传感器记录的超孔压变化数据进行单独讨论。
选取3#传感器超孔压数据呈周期性变化时期的450个值进行分析。该时期内的超孔压平均值为0.31 kPa,分析区间内的最小值可达-2.01 kPa,最大值达2.14 kPa。数据采集的6天内,超孔压数据变化共出现了六个完整的周期,具体数据见表4。通过6个周期的最大和最小压差的中值可以看出,3#传感器观测的孔隙压力值也呈逐渐衰减趋势。
将3#传感器与测试期间青岛潮汐数据对比,可以看出,超孔压与潮汐潮高变化通过相移即可得到吻和。本次测试期间,超孔压测量变化波动曲线与潮汐潮高变化波动曲线呈现出T/4的相位差,约2.5 h。
4.3 总结与讨论
本次测试数据主要从流体静力对沉积物孔隙压力的影响进行分析讨论。通过数据分析对比可以总结出以下几个方面:
(1) FBG-PPI基于光纤传感技术应用到近浅海的孔压原位观测能够有稳定的观测表现,同时这种压差感测技术适用于沉积物超孔隙压力的测量。
(2) 经过后期检修,发现1#传感器仅能回收温度中心波长值,无法返回压力中心波长值;设备回收后,通过传感器光谱曲线分析可知,1#传感器压力感测单元失效,从而导致其未能返回有效数据。故障原因可能为设备安装贯入过程中,锥尖部分直接触底,导致压力感测单元超量程失效。

图6 平衡超孔压数据实测与外推值对比Fig.6 Excess pore pressure at equilibrium from monitoring and extrapolation表3 测试孔压数据总结Table 3 Pore pressure data summary

传感器编号Transducernumber贯入深度Penetrationdepth/m平衡压力Equilibriumpressure/kPa最大孔隙压力Maximuminsertionpressure/kPat50/s21.55.018.89—30.51.108.4651384-0.5—0.81—
注:t50—孔压消散至初始孔压值50%时所需要的时间。
Note:t50the time for pore pressure to fell to 50% of its initial value
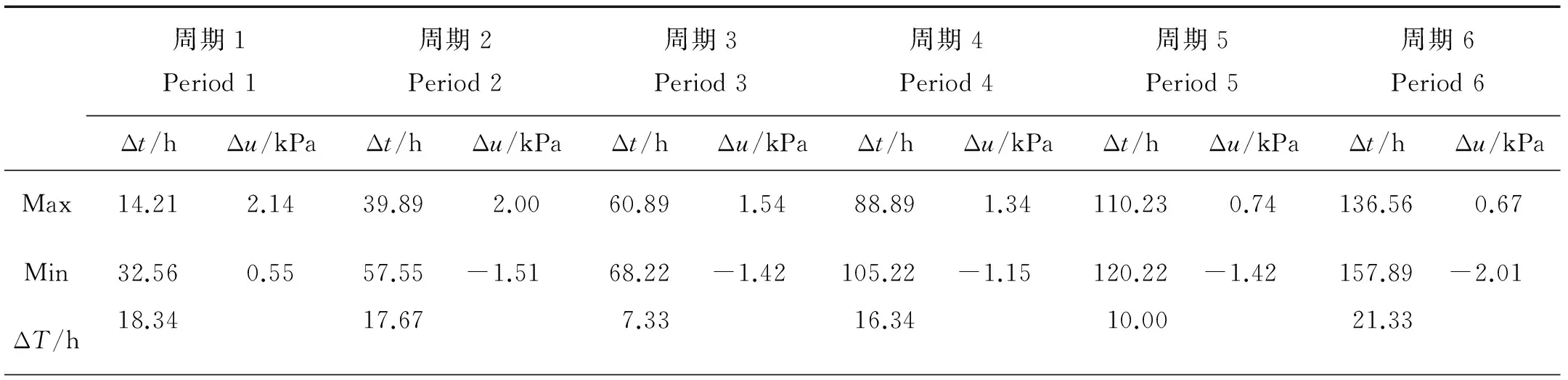
表4 3#传感器周期性数据总结
注:Δt——该测点距离设备贯入时间(h);ΔT——最大值与最小值之间的时间差(h)
Note:ΔtPenetration time(h); ΔtPeriod of maximum and minimum(h)
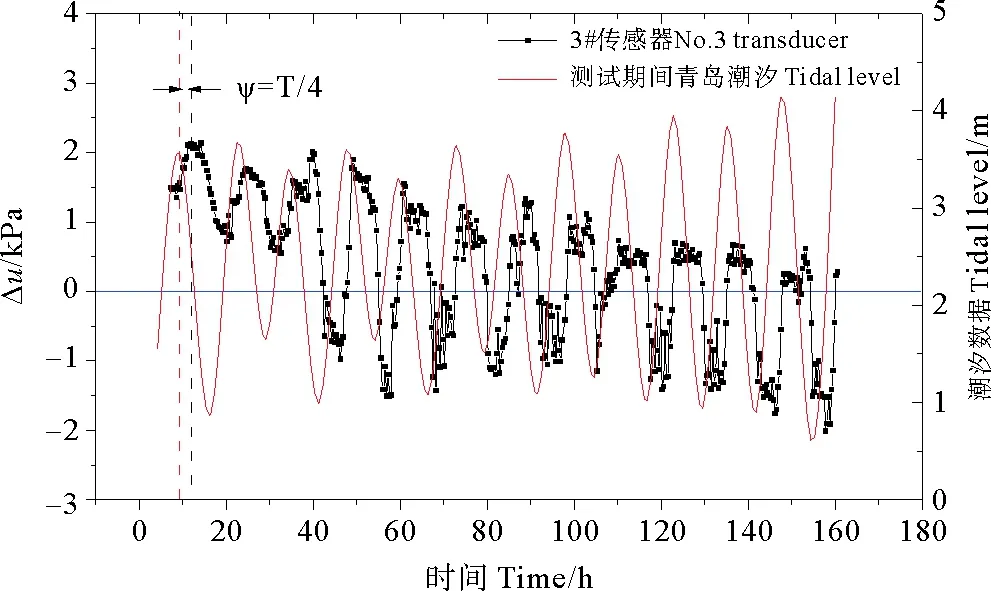
(测试期间青岛潮汐数据来自中国海事服务网[14]。 Qindao tidal dsta came from China Maritime Service Network.)图7 超孔压实测值与潮汐数据对比Fig.7 Comparison of excess pore pressure and tidal tide
(3) 设备贯入后8 h内的超孔压数据表现出2#、3#传感器其对于环境变化的响应协同一致性良好,在贯入结束后的初期,均有明显的消散趋势。4#传感器出现消散现象的原因可能为探杆未完全饱和所产生的测量数据延时。
(4) 低渗透性沉积物中,该套设备贯入所产生的超孔压消散需要一定的时间,该过程如结合静力触探,可以有效的获取沉积物垂向分布特性。目前的数据分析,其所需的超孔压消散周期应大于8 h。
(5) 本次测试选用经验推导的方式推算孔压消散平衡孔压值,并与2#、3#传感器5.5 h后获得的孔压值进行比对。2#传感器平衡孔压推算值与5.5 h后获得的平衡孔压值,其差值在传感器精度的可接受范围内;3#传感器的推算值与观测值相差较大,可能的原因为,3#传感器所处位置埋深较浅,沉积物渗透性较好,因此其达到平衡孔压所需的时间较2#传感器短,该经验方式并不适用于3#传感器所处位置的沉积物。另外不排除3#传感器测试过程中未实现绝对零值校准导致其测试结果偏大的可能。
(6) 原位观测潮汐作用于沉积物产生的超孔压,相对于实际的潮汐变化呈现出滞后与缓慢消散现象。本次测量过程中,3#传感器测量的压差中值逐渐趋近于0 kPa。
5 结语
通过对本次测试数据的简单分析可以看出,FBG-PPI已经初步具备原位观测沉积层超孔压变化的能力,在短期连续监测方面性能稳定,但同时也存在贯入扰动所产生的超孔压消散缓慢的问题。其中1#传感器在测试中出现失稳现象,也需要进一步排查和改善。本次测试期间获得的数据还有部分未获得完全解释,接下来的工作是结合其他原位测试对数据进一步解析,同时根据本次测试结果改进与完善FBG-PPI,使其更加适合于原位孔压观测。
海底沉积物孔压研究不仅需要在观测技术上进行提升和改进,更需要在数据的解析等方面开展更加深入的研究。探索深海沉积物产生超孔压现象的原因,制定海底沉积物孔压监测规范,对于分析海底沉积物孔压背后所涉及的沉积以及动力学问题具有十分重要的意义。希望本套设备能够随着技术的进步不断发展与完善,以更好地应用于海底沉积物孔压观测。
[1] Baligh M M, Levadoux J N. Consolidation after undrained piezocone penetration. II: Interpretation[J]. Journal of Geotechnical Engineering, 1986, 112(7): 727-745.
[2] Bennett R H. Pore-water pressure measurements: Mississippi delta submarine sediments[J]. Marine Georesources & Geotechnology, 1977, 2(1-4): 177-189.
[3] Richards A F, Øten K, Keller G H, et al. Differential piezometer probe for an in situ measurement of sea-floor[J]. Geotechnique, 1975, 25(2): 229-238.
[4] Bennett R H, Burns J T, Clarke T L, et al. Piezometer probes for assessing effective stress and stability in submarine sediments[M]. Springer US: Marine Slides and Other Mass Movements, 1982: 129-161.
[5] Prindle R W, Lopez A A. Pore Pressures in Marine Sediments-1981 Test of the Geotechnically Instrumented Seafloor Probe (GISP)[C][s.1.]: Offshore Technology Conference, 1983.
[6] Schultheiss P J. Pore pressures in marine sediments: An overview of measurement techniques and some geological and engineering applications[J]. Marine Geophysical Researches, 1990, 12(1-2): 153-168.
[7] Schultheiss P J, McPhail S D. Direct indication of pore-water advection from pore pressure measurements in Madeira Abyssal Plain sediments[J]. Nature, 1986, 320(6060): 348-350.
[8] Sultan N, Voisset M, Marsset B, et al. Potential role of compressional structures in generating submarine slope failures in the Niger Delta[J]. Marine Geology, 2007, 237(3): 169-190.
[9] Sultan N, Cattaneo A, Sibuet J C, et al. Deep sea in situ excess pore pressure and sediment deformation off NW Sumatra and its relation with the December 26, 2004 Great Sumatra-Andaman Earthquake[J]. International Journal of Earth Sciences, 2009, 98(4): 823-837.
[10] Sultan N, Marsset B, Ker S, et al. Hydrate dissolution as a potential mechanism for pockmark formation in the Niger delta[J]. Journal of Geophysical Research: Solid Earth, 2010, 115(B8): 4881-4892.
[11] Vanneste M, Sultan N, Garziglia S, et al. Seafloor instabilities and sediment deformation processes: the need for integrated, multi-disciplinary investigations[J]. Marine Geology, 2014, 352: 183-214.
[12] 刘涛, 崔逢, 张美鑫. 深海海床孔隙水压力原位观测技术研究进展[J]. 水利学报, 2015(s1):111-116. Liu Tao, Cui Feng, Zhang Meixin. Research progress of deep seabed pore pressure observation techniques in situ[J]. Chinese Journal of Hydraulic Engineering, 2015(s1):111-116.
[13] Davis E E, Horel G C, MacDonald R D, et al. Pore pressures and permeabilities measured in marine sediments with a tethered probe[J]. Journal of Geophysical Research: Solid Earth, 1991, 96(B4): 5975-5984.
[14] 中国海事服务网潮汐表[EB/OL]. http://ocean.cnss.com.cn/, 2017-5-24. Tide table for China Maritime Service Network[EB/OL]. http://ocean.cnss.com.cn/, 2017-5-24.
Abstract: With the development of deep-sea resources, more and more attention has been paid to the stability of deep-sea sediments. As an effective means of obtaining deep-sea sediment parameters, in-situ pore pressure monitoring technique should be paid enough attention to and studied. In this paper, based on the summary of deep-sea sediment pore pressure observation probe technology, combined with FBG sensing technology, an in-situ excess pore pressure observation instrument based on FBG has been designed and developed, and offshore test has been carried out. The observation position is 1.5m below the seabed, and the equilibrium excess pore pressure is up to 5.01kPa. During the test period, a sensor which is located 0.5m below the seabed, accurately obtained the excess pore pressure data of tides acting on the seafloor sediments and compared them with local tide data, with a phase difference of T/4.
Key words: marine sediment; pore water (gas) pressure; long-term in-situ observation; FBG; tidal action
责任编辑 徐 环
FBG Based Instrument for Marine Sediment Pore Pressure Reaearch
LIU Tao1,2, CHAI Wan-Li1, GUO Lei1
(1.Shandong Provincial Key Laboratory of Marine Environment and Geological Engineering,Ocean University of China, Qingdao 266100,China; 2.Laboratory for Marine Geology, Qingdao National Laboratory for Marine Science and Technology, Ocean University of China Qingdao 266061,China)
P736.21
A
1672-5174(2017)10-126-08
10.16441/j.cnki.hdxb.20160469
刘涛, 柴万里, 郭磊. 基于FBG的深海沉积物孔压观测设备研究[J]. 中国海洋大学学报(自然科学版), 2017, 47(10): 126-133.
LIU Tao, CHAI Wan-Li, GUO Lei. FBG based instrument for marine sediment pore pressure reaearch[J]. Periodical of Ocean University of China, 2017, 47(10): 126-133.
国家自然科学基金项目(41672272,41427803)资助 Supported by the National Natural Science Foundaiton of China(41672272,41427803)
2017-05-10;
2017-07-12
刘 涛(1979-),男,副教授,主要从事海洋工程地质和海底灾害观测等方面教学与科研工作。E-mail:ltmilan@ouc.edu.cn
猜你喜欢
幼儿100(2024年19期)2024-05-29 07:43:34
南京工业大学学报(自然科学版)(2024年1期)2024-01-23 04:38:20
广东土木与建筑(2022年9期)2022-10-15 08:41:22
现代信息科技(2021年13期)2021-02-19 05:28:04
直升机技术(2020年3期)2020-09-15 06:36:10
专用汽车(2020年3期)2020-04-07 12:32:36
水文地质工程地质(2019年1期)2019-02-18 08:42:00
天然产物研究与开发(2018年5期)2018-06-13 03:23:54
新技术新工艺(2018年1期)2018-02-05 02:31:14
河南科技(2014年12期)2014-02-27 14:10:29