xPC在大型船舶电力推进试验系统中的应用
2017-10-14 03:41高红星
船电技术 2017年5期
高红星
xPC在大型船舶电力推进试验系统中的应用
高红星
(武汉船用电力推进装置研究所,武汉430064)
本文主要介绍了xPC系统平台在船舶电力推进系统试验平台应用。xPC有着很好的可靠性和实时性,有丰富的Matlab各种库文件的支持,同时结合稳定的现场总线通信方式,为大型船舶电力推进系统系统提供多种负载,保证整个系统的动态性能满足各种试验的要求。从2010年应用至今,充分证明xPC试验系统的可靠性和可扩展性。
xPC RT系统 电力推进系统
0 引言
随着海洋工程船舶技术的发展,船舶电力推进系统得到了广泛的应用。为了确保设备研制一次成功,节省上船调试的时间周期,建立电力推进系统试验平台的重要性日益突出。本电力推进系统试验平台具有试验精度高、自动化程度高、操作简便等特点。控制系统主要有以下几个组成部分如表1所示。
本文主要介绍以上部分中RT系统部分。
1 实时系统
实时系统主要有以下几个部分工作组成:
1)xPC平台,包含测试模型软件结构、代码;
2)通信板卡、模拟量采集板卡,包含驱动软件编写;
3)测试过程和结果。
2 模拟系统平台-xPC
xPC Target 是一种高性能的主机-目标机构原型环境,它能把 Simulnk 模型和 Stateflow 模型和物理系统连接起来并且在低成本的 PC 硬件上实时运行。xPC Target 提供了系统的快速控制原型和硬件在回路仿真完整的解决方案。利用 xPC Target 可以在主机上设计模型,并用 Real-Time Workshop 和 Stateflow Coder 自动生成代码,最后下载到运行 xPC Target 实时内核的 PC 机上。用户可以使用 32 位或 64 位 X86 架构的电脑作为实时目标系统。软件运行在 32 位模式下。
对于该测试来说xPC的如下特点特别适合:
1) 在任何一台 PC 机上使用实时内核,可以运行来自 Simulink 和 Stateflow 模型,对研发人员来说基本Matlab下编写模型和离线模型的仿真都非常高效;
2) 支持任何 PC 系统,例如 TargetBox、PC/104、PC/104+、CompactPCI、嵌入式PC 机或其它任何兼容 PC 机,可以选择更灵活的接口标准适合系统的要求;
3) 灵活的启动选项,包括 CD,硬盘,CF 卡,网络和软盘;方便研发人员下载模型后切换到RT模式;
4)根据处理器的性能水平、模型规模和 I/O 复杂程度,采样率最高可达到 50 kHz;
5)实时调整参数,这一点对研发和操作人员能更好的细化控制参数来控制模型的实际效果;
6)在扩展的设备驱动库里,支持超过 300 种商业 I/O 板卡,可以选择合适的通信和模拟量采集模板;
7)开放的硬件驱动环境,支持系统集成方和硬件生产方提供的第三方驱动,为以后的系统扩展性留有足够的接口资源。
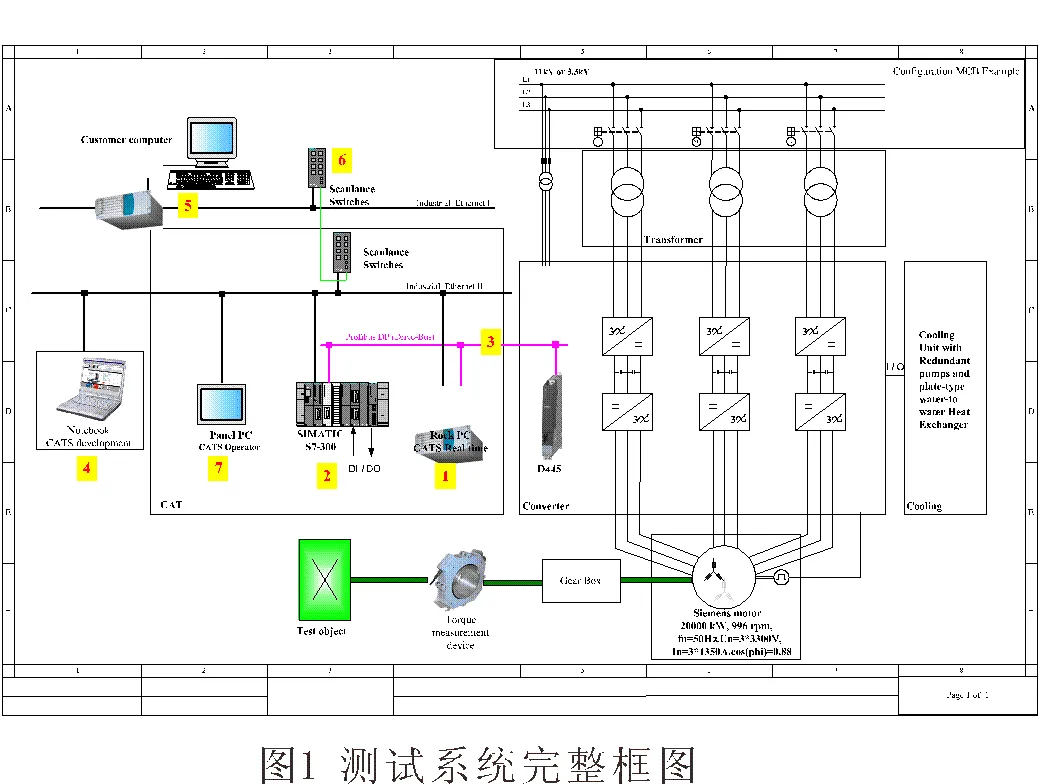
在编写软件前需要先定义基本的软件框架,实际基本控制框架(信息流)如下图2所示。
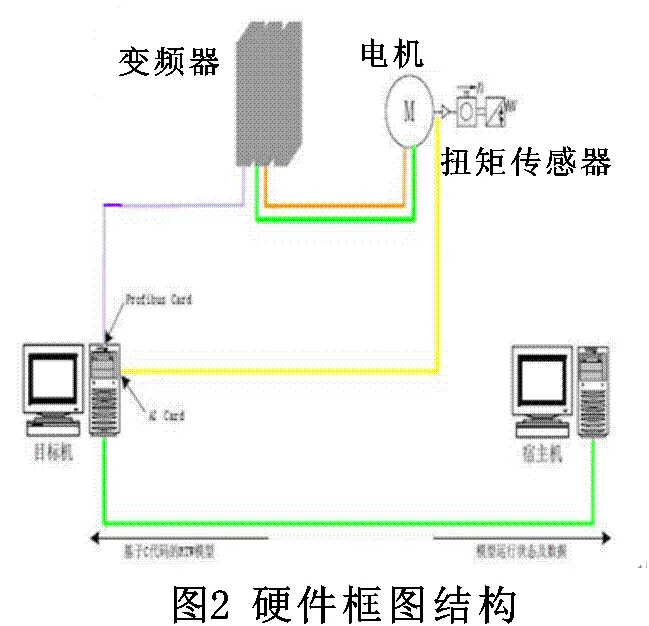
输入,从而形成闭环,既可实现速度反馈控制也可实现转矩反馈控制。目标机中运行由MATLAB xPC工具包所生成的RTOS实时系统内核,用于高效、实时运行控制模型,并将模型参数及运行状态通过网络连接传递给宿主机显示。图3是软件代码具体实施的框架(流程)。
如图2所示,装有AI模拟量采集模块以及PROFIBUS通讯模块的目标机通过PROFIBUS直接与变频器连接,驱动被控电机。电机扭矩及转速值通过AI板卡反馈至目标机,在控制程序中作为比较值。
如图3所示,完成整个系统所需软件流程为:
1)在宿主机通过MATLAB自带xPC explorer功能创建RTOS系统内核,并保存成目标机启动盘形式(可为软盘、CF卡或光盘),通过该启动盘启动目标机即进入xPC系统模式。
2)在宿主机上应用SIMULINK建立控制模型,并通过RTW workshop生成可高效执行的C代码,将该模型代码通过网络连接加载进目标机xPC系统。
3)目标机的PROFIBUS板卡和AI板卡采集到的数据通过模型预置输入输出参数参与运算。
4)模型运行的实时参数与目标机LabVIEW编写人机界面进行交互,可动态显示当前运行状态。
5)模型软件编写界面如下图4所示。
3 板卡驱动软件
如上文所述,控制系统主要用到了PROFIBUS通信板卡和模拟量采集板卡,通常板卡厂家会提供基本的库文件,需要在此基础上编写相应的驱动软件,让板卡融于到整个系统中。相对而言通信板卡比模拟量板卡复杂一些,下文以通信板卡为例,说明软件编写过程。
实际应用中采用CIF 50-PB板卡,主要包括两部分内容,一部分是xPC环境下,通过CIF 50-PB板卡读/写PROFIBUS网络上的实时信号;另一部分是建立xPC Target与人机界面软件的接口。
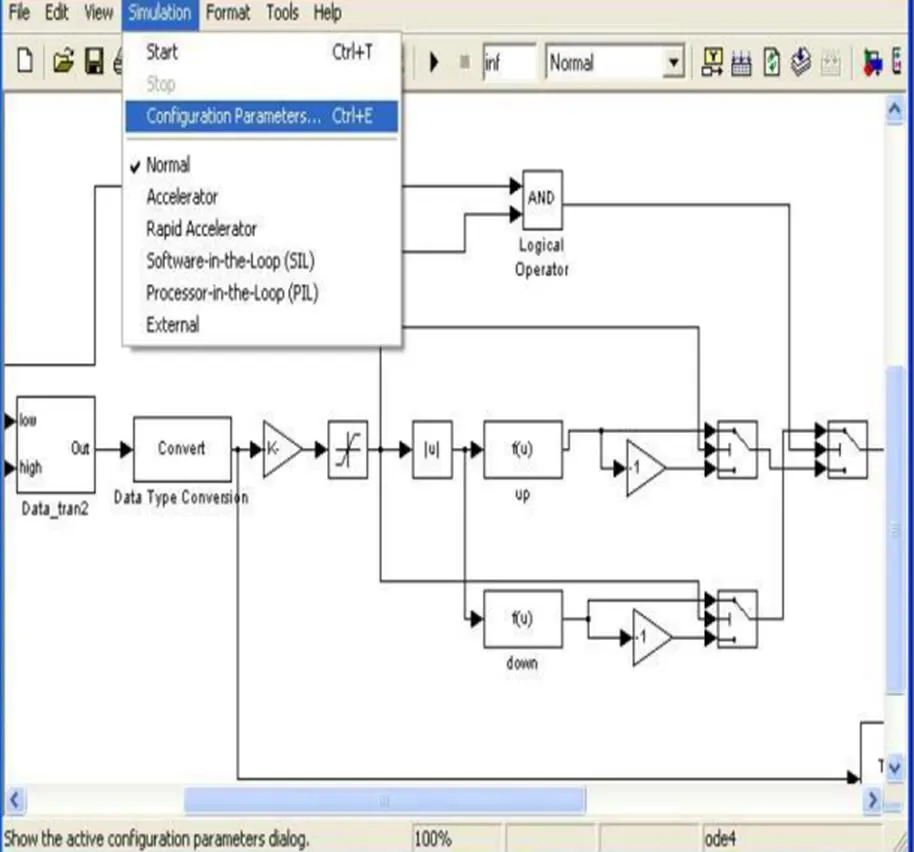
图4 软件界面示意图
3.1 基本功能
1)自定义从站
用户可自行指定所连从站类型、数量以及和主站的通讯数据格式,只需要改动驱动头文件中的参数即可。
2)采样时间自定义
用户可自行设定采样时间。
3)错误信息报警提示
3.2 实现功能
1)CIF 50-PB卡主要实现XPC与PROFIBUS网络的数据通讯; 2)xPC Target与LabVIEW的接口,主要实现通过LabVIEW程序来控制XPC中模型参数的控制。
4 实验结果
对于测试系统来说,最重要是两个方面,实时性和容错性,下文为主要测试结果。
4.1运行效率
主要影响运行效率的因素为:a)所连模拟量输入的多少;b)在人机界面显示内容的多少; c)通信数据量大小影响明显小于通信速率,高通信速率下需要考虑光网络代替电网络;d)在无I/O输入,不打印屏幕信息的情况下运行一个二阶系统模型周期为10ms,运行10阶系统模型时间为15ms;e)模拟实际运行,输出参数信息,并与变频器、电机共同工作于闭环情况下执行周期为5 ms。
4.2 错误处理
在整个通讯线路出现故障如通讯线断开,主、从站故障时:a)xPC系统停止运行及一切数据传输;b)人机界面显示详细错误信息;c)变频器保持接收数据不变,防止电机状态出现突变,然后变频器显示通信故障,通过故障停机。
5 结束语
经过多年的使用,证实了控制系统在测试台中功能非常实用,即适合研发人员很容易在Matlab平台上建立模型、仿真模型;也适合操作人员实时控制模型的运行参数;后期扩展新的测试模型也非常方便。整个系统的动态性完全满足测试系统要求。
[1] xPCTarget help. The MathWorks.Inc, 2008.
[2] SIEMENS. TIA/PLC/WinCC/工业通信系列文档.
[3] 薛定宇等. 基于 MATLAB/Simulink系统仿真技术与应用. 北京:清华大学出版社, 2002.
Application of xPC System to Electric Propulsion System for A Large Ship
Gao Hongxing
(Wuhan Institute of Marine Electric Propulsion,Wuhan430064,China)
TP273
A
1003-4862(2017)05-0005-03
2016-11-15
高红星(1972-),男,高级工程师。研究方向:电力电子与电气传动技术。
猜你喜欢
测控技术(2018年3期)2018-11-25
测控技术(2018年12期)2018-11-25
铁道通信信号(2016年1期)2016-06-01
广东石油化工学院学报(2016年6期)2016-05-17
电子制作(2016年21期)2016-05-17
火控雷达技术(2016年3期)2016-02-06
电测与仪表(2015年11期)2015-04-09
铁路通信信号工程技术(2015年4期)2015-02-28
自动化博览(2014年10期)2014-02-28
铁路通信信号工程技术(2014年5期)2014-02-28