
TLP风机基础二阶动力响应研究
2017-10-12 00:38:04钱丽佳
海洋工程 2017年3期
李 英,钱丽佳,程 阳
(天津大学 建筑工程学院 水利工程仿真与安全国家重点实验室,天津 300072)
TLP风机基础二阶动力响应研究
李 英,钱丽佳,程 阳
(天津大学 建筑工程学院 水利工程仿真与安全国家重点实验室,天津 300072)
针对概念设计的位于南海的三腿TLP浮式风机基础,应用基于水动力与空气动力耦合的FAST程序在时域内开展了风机基础的动力响应分析。结果表明,风载荷对TLP风机基础六个自由度的动力响应,尤其是纵摇影响显著。由于耦合作用,二阶波浪力进一步增大了基础的纵荡、横摇和艏摇响应。谱密度分析表明,风载荷及二阶波浪力显著地增大了浮式基础水平面内的低频运动。此外,基于风机基础运动时程,应用ORCAFLEX软件开展了时域内筋腱的顶部张力特性分析,结果表明,风载荷和二阶波浪力增大了筋腱顶张力幅值。
TLP风机基础;二阶波浪载荷;风载荷;耦合动力分析;筋腱;动力响应
Abstract: The hydrodynamic response of a three-leg TLP wind turbine system designed for South China Sea conceptually was studied in time domain using FAST, based on the coupled effect of hydrodynamic and aerodynamic forces. The results show that the dynamic responses of TLP wind turbine system at six degrees of freedom, especially pitch, are increased significantly under the wind load. Due to the coupled effect, the sway, roll and yaw are increased further under the effect of the second-order wave force. The analysis of the power spectral density indicates that the wind load and the second-order wave force increase the low frequency motion in horizontal plane. Additionally, based on the motion history of the TLP wind turbine system, the characteristics of tendon top tension were analyzed using ORCAFLEX in time domain. The results show that the top tension range increases significantly under the effect of the wind and the second-order wave force.
Keywords: TLP wind turbine system; second-order hydrodynamic force; wind force; coupled dynamic analysis; tendon; hydrodynamic response
风能由于其清洁可再生、利用方便等特点成为目前最有开发利用前景的一种可再生能源。海上风能资源丰富,品质优良,视觉污染和噪音污染较陆地风能小,近年来发展迅速。随着对海上风能的开发不断向深海转移,传统的固定式基础已经不再具有经济优势,浮式风机得到越来越多的重视。
浮式风机基础结构的海底力矩较小,对于海床条件的要求大大降低,且经济优势显著,因此,国内外学者对半潜式、Spar与TLP浮式风机基础展开了广泛地研究。针对在湍流风、波浪、恒定流共同作用下的半潜式风机,Zhang等[1]开展了频域和时域内的耦合动力分析,并对浮式风机基础的安全性进行了验证。应用Aero-Hydro-Servo-Elastic耦合仿真技术,Karimirad和Michailides[2]对半潜式风机基础开展了时域内的动力响应研究。关于Spar风机在规则波和定常风作用下的动力响应,唐耀等[3]研究发现,系泊平台的运动可分为低频部分与高频部分,且其运动由风力和波浪共同决定。闫发锁等[4]发展了适用于深水浮式风机基础的全耦合动力响应分析方法,并通过对某Spar风机基础进行水动力响应分析,验证了该方法的有效性。Ormberg等[5]对风、浪、流联合作用下的Spar风机基础进行了在时域内的耦合动力分析,提高了海上浮式风机数值模拟时空气动力的计算精度。TLP风机基础方面,卫涛等[6]对整体结构进行了模态分析,研究了浮式风机整体结构的动态特性。刘珍等[7]采用高阶边界元法建立TLP风机的数值模型,对风、浪、流耦合作用下的风机基础的水动力响应进行了模拟分析。Wang等[8]分析了TLP风机基础六个自由度方向的运动响应以及塔座的受力情况,提出了减小结构艏摇运动的建议。假设风载荷为定常量,Nematabakhsh等[9]分别在频域和时域内通过求解N-S方程得到风场和波浪场中TLP风机基础的运动响应。Bachynski等[10]对TLP风机基础进行了时域内的耦合计算,研究了TLP浮式基础结构参数对风机基础运动以及筋腱张力的影响规律。
在以往的研究中,一般假设高阶波浪力足够小,只考虑一阶波浪力,使得问题在合理的精度范围内得到极大的简化。一阶波浪力是作用在风机结构上的主要波浪作用力,与入射波具有相同的频率,幅值变化较大。二阶波浪力由波浪两个基本频率之和与差产生,分别对应力和运动之中的高频和低频部分。二阶作用力在数值上比一阶作用力要小得多,但TLP风机基础在平面内的恢复力通常很小,其对应的自然振荡周期较大,可能会与低频作用力产生强烈共振。另外,二阶作用力中高频部分以及空气动力载荷对风机基础的影响也有待研究。这里针对TLP风机基础,建立了包括上部风机、浮式基础和张力筋腱的数值模型,充分考虑了水动力载荷与空气动力载荷的耦合性,在时域内开展了TLP风机基础的动力响应分析,研究了风力与二阶波浪力对TLP风机基础动力响应及筋腱顶端张力的影响。
1 理论基础
海上浮式风机基础受到风、波浪、海流等多种环境因素的联合作用,上部风机主要受空气动力载荷的作用,浮式基础与张力筋腱主要受波浪和海流的作用。
1.1一阶波浪载荷
分析海洋工程结构物上的一阶波浪载荷时,一般依据结构物尺度是否对波浪运动有显著影响,将问题分为小尺度和大尺度两类结构。对于与波长相比尺度较小的细长柱体(D/L<0.2,D为柱体直径,L为波长),主要考虑波浪的黏滞效应与附加质量效应,在工程中广泛采用莫里森方程计算波浪力,它是以绕流理论为基础的半理论半经验公式。公式中,作用在单位长柱体上的水平力表示为:
式中:μ为水质点速度;ρ为海水密度;CD为垂直于柱体轴线方向的拖曳力系数;CM为附加质量系数。
对于大尺度构件,应考虑入射波的绕射效应以及自由表面效应,可应用三维势流理论计算波浪载荷。假定波浪作用场中的流体为均匀、无黏性、不可压的理想流体,流体运动是有势的,速度势满足拉普拉斯方程,并满足物体表面、自由表面、海底及无穷远处的边界条件。总速度势由入射波速度势φI与散射势φS组成,散射势φS为绕射势φD和辐射势φR之和。通过在结构物表面S上对波压强积分,求解得到总波浪力:
式中:ω为角频率,n为结构物表面S上某点的单位外法向矢量。
1.2二阶波浪载荷
二阶波浪力的计算采用二阶传递函数法(QFT)。QTF法考虑平均波浪力、差频力及和频力的作用,是二阶波浪力的准确解。二阶波浪力表达式为:

式中:ω1,ω2为波浪的不同频率的成分;β为波浪入射角;Hω1,ω2,β为二阶和频/差频的传递函数;Z(ω1,β),Z(ω2,β)为某一角度下不同频率成分的波面升高。
1.3空气动力载荷
考虑风机叶片对来流风向和风速的实时调整,采用经典的叶素-动量理论(BEM),模拟风机在正常工作状态下承受的空气动力载荷。BEM方法将叶片分离成厚度很小的基本叶素单元,如图1所示。在BEM方法中,一旦确定了轴向诱导因子a和切向诱导因子b的取值,则可求解出作用在叶片上的空气推动力。通常使用迭代方法求解诱导因子a和b,其一般步骤如下:
1)设定诱导因子a和b的初始值,一般取零。
2)求解叶素的入流角Φ:
3)通过升力系数和阻力系数与入流角曲线,求解升力系数CL和阻力系数CD。
4)求解Cx和CR:
5)重新计算诱导因子a和b的取值:
式中:σ=BC/2πr为叶片在r处的实度;F为普朗特修正因子,无特殊要求时通常取1。
6)比较误差,通常取一足够小数ε,当两次迭代的误差小于设定的误差时(一般规定取ε=0.001),则取当前a和b值作为诱导因子,否则回到步骤2)。

图1 叶剖面和气流角、受力关系Fig. 1 Relationship of blade profile, flow angle and force
2 数值模型
2.1风机数据与环境参数
针对南海海域的环境条件,基于NREL-5MW风机结构参数,设计了三腿-六筋腱TLP风机基础,如图2所示。
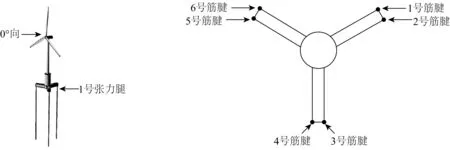
图2 TLP风机系统结构示意Fig. 2 Structure diagram of TLP wind turbine system
TLP风机系统主要包括上部风机、浮式基础以及张力筋腱三部分。其中上部风机结构中的塔柱和叶片为柔性结构,其余部分为刚性体,浮式基础采用三浮筒海星式基础。风机系统的主要参数如表1所示。

表1 TLP风机系统参数Tab. 1 Parameters of TLP wind turbine system
TLP海上风机系统工作的环境条件采用南海一年一遇波浪和海流,如表2所示。作用在风机系统上的波浪、流和风载荷方向相同。

表2 环境参数Tab. 2 Environmental parameters
2.2计算模型
首先运用SESAM软件中的GeniE模块建立TLP浮式基础以及包括自由表面的基础模型,将模型导入HydroD模块模拟一阶和二阶波浪力传递函数、附加质量以及势流阻尼。再考虑水动力与空气动力的耦合作用,应用基于多体气弹性动力理论的FAST软件对风机系统在时域内进行数值模拟,研究TLP风机系统的动力响应。最后,为了研究筋腱顶端张力的特性,将上部风机基础的动力响应时程曲线作为张力筋腱上端的边界条件,应用ORCAFLEX软件建立TLP海上风机筋腱有限元模型。
3 计算结果与分析
3.1TLP风机基础运动特性
针对概念设计的TLP浮式风机基础建立数值模型,在不考虑风、浪、流等外载的情况下,计算得到系统六个自由度的固有周期,如表3所示。

表3 TLP风机基础固有周期Tab. 3 Natural periods of TLP wind turbine system
当风、波浪、流的入射方向都为0°时,分别模拟TLP风机基础在只考虑一阶波浪载荷以及考虑风载荷、二阶波浪载荷共同作用下的运动情况,得到TLP风机基础六个自由度的动力响应时程曲线,如图3所示。由图3可以看出,由于TLP基础半刚性半顺应式的结构特点,基础在水平面内横荡、纵荡以及艏摇运动方向上动力响应幅值较大,在升沉、纵摇以及横摇运动方向上动力响应幅值偏小。
另外,仅在一阶波浪力以及流力作用下基础的纵荡、纵摇以及升沉运动响应较小。由于风载荷的影响,基础在这三个自由度的运动响应均值以及幅值呈数倍甚至数十倍的增大。此外,由于作用在TLP风机上的巨大风倾力矩,与TLP平台相比,TLP风机基础纵摇的动力响应较大。在一阶和二阶波浪力、风、流联合作用下,基础纵摇最大值接近2°。当仅考虑一阶波浪力以及流力作用时,由于结构的对称性,基础的横荡、横摇以及艏摇运动响应基本为零,但考虑风载荷时,湍流风场激励了这三个自由度的运动响应。另一方面,二阶波浪力对基础横荡影响不大,而使横摇和艏摇的极值进一步增大。

图3 TLP风机基础的动力响应的时程曲线Fig. 3 Time-domain dynamic responses of TLP wind turbine foundation
为了研究不同频率的波浪与低频风对TLP风机动力响应的影响,将风机动力响应的时程曲线进行傅里叶变换,得到相应的功率谱密度。由于浮式基础的横荡和纵荡以及横摇和纵摇的功率谱密度函数变化趋势相同,文中只给出了基础在纵荡、升沉、纵摇以及艏摇四个自由度的位移响应功率谱密度,如图4所示。可以看出,由于风载荷及二阶波浪力的影响,基础在各个自由度的低频所对应的谱密度增大近千倍。基础纵荡和艏摇的谱密度曲线分别在0.02 Hz以及0.03 Hz出现峰值,而升沉以及纵摇的谱密度曲线分别在0.48 Hz以及0.23 Hz处出现峰值,均与其固有周期相对应。此外,基础的纵荡、升沉的谱密度函数在0.09 Hz出现第二个峰值,对应的是波浪的谱峰周期;由于升沉与纵荡的耦合,基础的升沉谱密度曲线在低频处出现第三个峰值。

图4 TLP风机基础的动力响应的功率谱密度Fig. 4 Power spectral density of dynamic responses of TLP wind turbine foundation
3.2张力筋腱运动特性
图5给出了TLP风机一号张力腿筋腱在一阶波浪力以及一阶波浪力和二阶波浪力共同作用下的张力时程曲线和对应的功率谱密度函数。由图5(a)和图5(b)可以看出,基础偏移平衡位置导致筋腱顶端张力较初始张力略有增大,二阶波浪力对筋腱张力均值的影响不大,但会使张力幅值增大很多,这可能导致筋腱疲劳寿命的降低。

图5 筋腱张力时间历程曲线与功率谱密度Fig. 5 Time-domain responses and power spectral density of tendon top tension
由图5(c)和图5(d)可以看出,筋腱张力主频率与次频率分别为0.48 Hz和0.2 Hz,这与浮式基础升沉以及纵摇功率谱密度峰值对应的频率范围相一致,表明浮式基础的升沉和纵摇是导致筋腱张力变化的主要因素。此外,二阶波浪力使得筋腱顶张力功率谱密度曲线在低频以及高频处的幅值明显增大,而主频率的谱密度显著减小。
表4分别给出了在一阶波浪载荷以及一阶和二阶波浪载荷共同作用下,六根筋腱顶端张力的统计参数。数据表明,筋腱顶端张力均值约为3 700 kN,不同筋腱顶端张力统计值变化不大,而二阶波浪载荷的作用导致筋腱顶端张力变化幅值增大。其中,1号筋腱顶端张力最小值降低最明显,减小443 kN,降低12.1%;5号筋腱顶端张力最大值增大幅度最大,增加222 kN,增大5.9%。另外,六根筋腱的顶端张力均方差都显著增大,表明二阶波浪载荷将对筋腱疲劳有显著影响。

表4 筋腱顶端张力Tab. 4 Tendon top tension
4 结 语
综合考虑风、浪、流载荷的影响,在频域内对TLP浮式风机基础进行了动力响应的分析,在时域内对TLP风机进行了空气动力与水动力耦合的动力响应分析。分析了一阶波浪载荷、二阶波浪载荷以及风载荷对TLP风机动力响应的影响,并重点研究了二阶波浪力与风力对风机基础动力响应的影响,当入射角为0o时得到如下结论:
1)风载荷对TLP风机基础六个自由度的动力响应都有着显著的影响,另外,二阶波浪载对基础除横荡外的其他运动方向上的动力响应有进一步的放大。
2)由谱密度可知,风载荷及二阶波浪载荷显著增大了浮式基础水平面内的低频运动,尤其是纵荡的固有频率所对应的谱密度增大了100倍。
3)浮式基础的升沉和纵摇运动是导致筋腱张力变化的主要控制因素。二阶波浪载荷造成低频和高频的筋腱张力幅值明显增大。另外,二阶波浪载荷对筋腱顶端张力均值的影响不大,但张力均方差显著增大,对筋腱疲劳有不可忽视的影响。
[1] ZHANG Ruoyu, TANG Yougang, HU Jun, et al. Dynamic response in frequency and time domains of a floating foundation for offshore wind turbines[J].Ocean Engineering, 2013,60:115-123.
[2] KARIMIRAD M, MICHAILIDES C. Dynamic analysis of a braceless semisubmersible offshore wind turbine in operational conditions[J].Energy Procedia, 2015, 80:21-29.
[3] 唐耀,范菊,邹早建,等.浮式风机平台在规则波和定常风作用下的动力响应分析[J].中国海洋平台, 2014, 29(1):50-56.(TANG Yao, FAN Ju, ZOU Zaojian, et al. Dynamic response analysis of floating offshore wind turbine platform in regular waves and steady winds[J].China Offshore Platform,2014,29(1):50-56.(in Chinese))
[4] 闫发锁,张成祥,杨慧,等.浮式风机系统水-气动力耦合分析方法[J].上海交通大学学报,2014,48(4):570-582.(YAN Fasuo, ZHANG Chengxiang, YANG Hui, et al. Coupling hydrodynamic and aerodynamic computations of offshore floating wind turbines[J].Journal of Shanghai Jiao Tong University,2014,48(4):570-582.(in Chinese))
[5] ORMBERG H, BACHYNSKI E E. Global analysis of floating wind turbines: code development, model sensitivity and Benchmark study[C]//Proceedings of the Twenty-second International Offshore and Polar Engineering Conference. 2012: 17-22.
[6] 卫涛, 李良碧.海上张力腿浮式风机整体结构动态特性研究[J].可再生能源,2014,32(2):196-200.(WEI Tao, LI Liangbi. Study on dynamic characteristic of overall structure of offshore floating wind turbine on a tension leg platform[J].Renewable Energy Resources,2014,32(2):196-200.(in Chinese))
[7] 刘珍, 马小剑, 赵艳, 等.波流耦合作用海上张力腿风机运动响应研究[J].中国海洋平台, 2014, 29(1):20-27.(LIU Zhen, MA Xiaojian, ZHAO Yan, et al. The research of the motion responses of wave-current interaction with offshore wind turbine foundations[J].China Offshore Platform,2014,29(1):20-27.(in Chinese))
[8] WANG Haifeng, FAN Youhua. Preliminary design of offshore wind turbine tension leg platform in the South China Sea [J]. Journal of Engineering Science and Technology Review, 2013, 6(3):88-92.
[9] NEMATABAKHSH A, OLINGER D J, TTYGGVASON G. A nonlinear computational model of floating wind turbines[J]. Journal of Fluids Engineering, 2013, 135(12):1894-1901.
[10] BACHYNSKI E E, MOAN T. Design considerations for tension leg platform wind turbines[J]. Marine Structures, 2012, 29:89-114.
Investigation of the second-order hydrodynamic response of TLP wind turbine system
LI Ying, QIAN Lijia, CHENG Yang
(State Kay Laboratory of Hydraulic Engineering Simulation and Safety, School of Civil Engineering, Tianjin University, Tianjin 300072, China)
P752; TK89
A
10.16483/j.issn.1005-9865.2017.03.007
1005-9865(2017)03-0052-07
2016-05-19
国家973课题资助项目(2014CB046804);国家自然科学基金项目(51409185);天津市应用基础与前沿技术研究计划(15JCYBJC21700)
李 英(1975-),女,河北保定人,副教授,博士,从事海洋立管设计和水动力研究。
程 阳(1991-),男,天津人,硕士研究生,从事海洋工程专业研究。E-mail:15922256215@163.com
猜你喜欢
云南化工(2021年5期)2021-12-21 07:41:52
中国海上油气(2021年2期)2021-06-09 08:13:48
海洋工程装备与技术(2020年2期)2020-07-13 07:08:18
应用数学(2020年2期)2020-06-24 06:02:46
天津大学学报(自然科学与工程技术版)(2019年1期)2019-12-21 09:03:36
建材发展导向(2019年10期)2019-08-24 06:24:52
数学物理学报(2018年6期)2019-01-28 08:58:02
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
石油化工建设(2018年2期)2018-07-11 01:24:58
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:44
