
三电平ANPC逆变器中点电压平衡的VSVPWM控制策略
2017-10-10 01:51马大俊胡存刚王群京张超
电气传动 2017年9期
马大俊,胡存刚,,王群京,张超
(1.安徽大学电气工程与自动化学院,安徽合肥230601;2.安徽大学安徽省工业节电与电能质量控制协同创新中心,安徽合肥230601;3.安徽大学教育部电能质量工程研究中心,安徽合肥230601)
三电平ANPC逆变器中点电压平衡的VSVPWM控制策略
马大俊1,胡存刚1,2,3,王群京2,3,张超1
(1.安徽大学电气工程与自动化学院,安徽合肥230601;2.安徽大学安徽省工业节电与电能质量控制协同创新中心,安徽合肥230601;3.安徽大学教育部电能质量工程研究中心,安徽合肥230601)
提出了一种用于控制三电平ANPC逆变器中点电压平衡的改进式虚拟空间矢量调制(VSVPWM)方法,该方法使用与传统VSVPWM调制方法一样的基本矢量参与合成虚拟小矢量和虚拟中矢量,并根据采样得到的中点电压偏移情况以及三相电流的大小。在低调制度时,重新计算合成虚拟小矢量的正负小矢量的分配系数;在调制度较高时,重新选择产生不同中点电流的改进式虚拟中矢量,从而达到动态调节中点电压平衡的目的。此方法增强了中点电压平衡的控制效果,且实现了对整个矢量空间范围内中点电压的控制。最后,通过仿真和实验验证了所提出的控制策略的有效性。
三电平逆变器;有源中点钳位;中点电压;虚拟空间矢量调制
Abstract:An improved virtual space vector PWM(VSVPWM)strategy was proposed to balance the neutralpointpotential(NP)forthree-levelactiveneutral-point-clamped(ANPC)inverter.Theimprovedvirtualvectors′synthesis method was based on the VSVPWM strategy.According to the NP offset and three-phase currents,when the modulation index was lower,the partition coefficient of a pair of short vectors could be recalculated,and when the modulation index was high,the appropriate improved virtual medium vectors which produce different neutral point current could be reselected in the next fundamental period.Therefore,the NP could be controlled effectively.This strategy can balance the NP wherever the reference vector locates in the space vector diagram(SVD).Lastly,simulation and experimental results are provided to verify the effectiveness of the proposed control strategy.
Key words:three-level inverter;active neutral-point-clamped;neutral point potential;virtual space vector pulsewidth modulation
多电平逆变器具有功率器件承受电压应力小、输出谐波含量小以及效率高等优点,受到了国内外学者的广泛关注[1-2]。三电平有源中点钳位型(active neutral point clamped,ANPC)逆变器的拓扑由德国学者Bruckner T于2001年首次提出[3],该拓扑采用功率开关器件代替了传统中点钳位型(neutral point clamped,NPC)逆变器拓扑[4-5]中的钳位二极管,产生了4种冗余的零电压状态,在逆变器的工作中,通过合理使用这些冗余的零电压状态即可平衡各功率开关器件的损耗分布[6]。
NPC拓扑存在着中点电压不平衡的问题,当直流侧电容电压偏差较大时会造成输出电流波形畸变率增大,低次谐波含量增加,严重时甚至有可能会造成功率开关器件和滤波电容的损坏。因此,近年来NPC逆变器的中点电压平衡问题受到了国内外学者的广泛关注[6-14]。文献[6-8]通过分析中点电压和零序电压的关系,提出了采用载波移相PWM和基于零序电压注入的中点电压平衡控制方法,该方法只能在一定的调制度和功率因数下对中点电压进行有效平衡控制;文献[9-10]提出了基于空间矢量调制(space vector pulse width modulation,SVPWM)的中点电压平衡控制策略,这些控制方法都是采用传统的最近三矢量(nearest three vector,NTV)方法来合成参考矢量,在调制度较大和功率因数较低时,中点电压平衡不能得到有效的控制;文献[11]提出了一种简化的三电平SVPWM算法,将三电平空间矢量里6个中矢量的顶点中相对面的2个顶点两两相连,得到的3条线将该六边形区域平均分成6个四边形的扇区,该算法可以得到相应的7段式开关序列,但简单的7段式开关序列会造成明显的中点电位不平衡;文献[12-15]提出了虚拟空间矢量调制方法(virtual SVPWM,VSVPWM),在稳定状态时理论上中点电压能够实现平衡,但在实际动态运行过程中,由于受到器件的参数、直流电压的波动、负载变化和其他非线性因素等的影响不能保证中点电压理论上的平衡,且在调制度较大时不能快速地实现中点电压控制。
本文针对三电平ANPC逆变器中点电压不平衡的问题,提出了一种用于控制中点电压平衡的改进式虚拟空间矢量调制策略。该策略选择与传统VSVPWM调制方法一样的基本矢量参与合成虚拟小矢量和虚拟中矢量,且当合成虚拟中矢量的3个矢量的系数不同时,产生的中点电流也不同,而这些不同的中点电流对中点电压的影响也不同,所以本文重新定义了3个不同的虚拟中矢量。根据采样得到的中点电压偏移情况以及三相电流的大小,在调制度较低时,重新计算合成虚拟小矢量的正负小矢量的分配系数;在调制度较高时,重新选择产生不同中点电流的改进式虚拟中矢量,从而来动态地调节中点电压的平衡。该策略增强了中点电压平衡的控制效果,且克服了传统的SVPWM以及VSVPWM控制策略在某些区域内无法控制中点电压平衡的不足。最后,通过仿真和实验验证了该控制策略的有效性。
1 三电平ANPC拓扑
三相三电平ANPC逆变器的拓扑如图1所示。
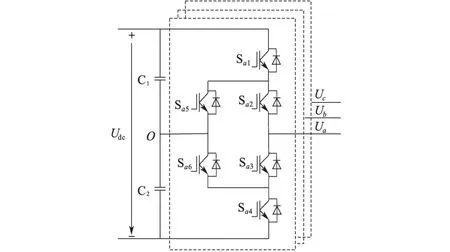
图1 三电平有源中点钳位逆变器拓扑Fig.1 Three-level ANPC converter topology
图1中,每相桥臂都由6个功率开关器件组成,分别为Sx1,Sx2,Sx3,Sx4,Sx5和Sx6,其中x表示a相、b相或者c相。因为有源钳位的作用,每相桥臂都可以输出P,O,N3种状态,对应输出的电压分别为Udc/2,0,-Udc/2。因为用功率开关器件Sx5和Sx6代替了传统的二极管钳位型逆变器中的钳位二极管,所以三电平ANPC的拓扑有了4种冗余的零状态,分别为OU1,OU2,OL1和OL2,通过合理地分配这4种冗余零状态的作用时间就可以平衡开关器件的损耗[16]。三电平ANPC逆变器每相都有6种开关状态,如表1所示。其中开关状态“1”表示功率开关器件处于开通状态,开关状态“0”表示功率开关器件处于关闭状态。
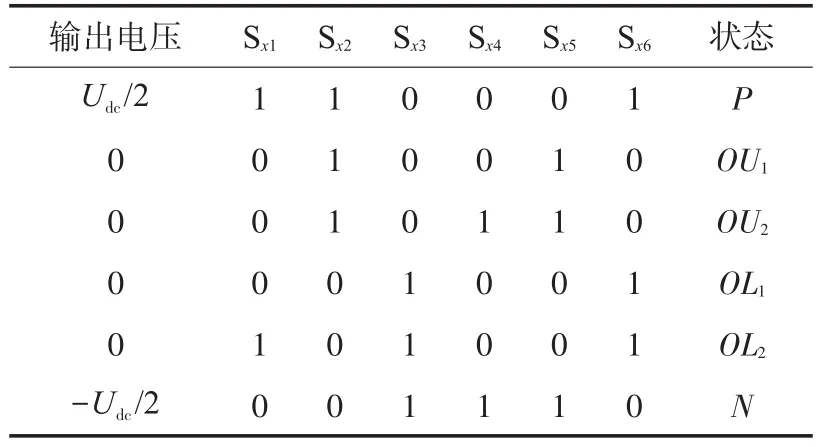
表1 三电平ANPC逆变器的开关状态Tab.1 Switching states of three-level ANPC converter
2 空间矢量调制
传统的三电平空间矢量图如图2所示,整个空间矢量图分为A~F 6个大区,每个大区性质类似。三电平逆变器的基本矢量按照模长可以分为6个大矢量、6个中矢量、6对正负小矢量以及3个零矢量。
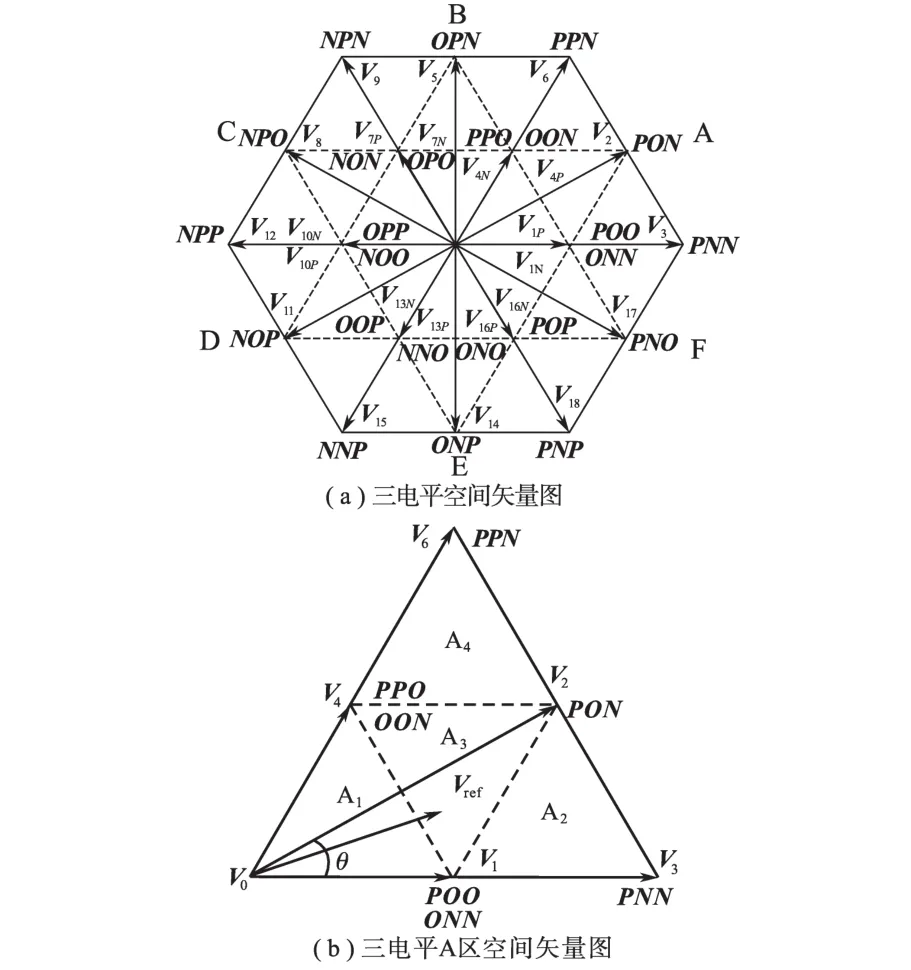
图2 三电平空间矢量图Fig.2 Three level space vectors diagram
大矢量和零矢量对中点电压没有影响,而中矢量和正负小矢量对中点电流的影响如表2所示。令电流从逆变器流向负载为正,中点电压Unp由直流下侧电容电压减去直流上侧电容电压,则当三相输出电流ia(t),ib(t),ic(t)为正时,中矢量和正负小矢量对中点电压的影响如表3所示。由表3可知,正小矢量和中矢量使中点电压减小,负小矢量使中点电压增加。

表3 不同矢量对中点电压的影响Tab.3 Effect on NP with different vectors
3 改进式VSVPWM及中点电压平衡控制策略
由表2和表3可知,成对的正、负小矢量对中点电压的影响相反,因此可以通过控制正、负小矢量的作用时间来控制中点电压平衡。但中矢量对中点电压的影响是根据电流方向确定,其自身无法调节。
3.1 改进式虚拟空间矢量的定义
以A区为例,定义改进的虚拟空间矢量。设电流从逆变器流向负载为正,中点电压的偏移由直流下侧电容电压减去直流上侧电容电压,且在1个开关周期Ts内,三相输出电流ia,ib,ic为恒定值。为了简化矢量分区和作用时间的计算,本文引入了g-h坐标系。
虚拟小矢量的定义:利用一对冗余的正负小矢量合成虚拟小矢量。以矢量ONN,POO为例,构建虚拟小矢量:

矢量ONN作用时的中点电流为ia,矢量POO作用时的中点电流为-ia。所以在矢量VVS1作用时间TVS1期间内,流出逆变器中点的电荷为

当kS1=0.5时,流出逆变器中点的电荷量为零,则虚拟小矢量VVS1在作用时间TVS1期间内,对逆变器的中点电位没有影响。同理可以合成出虚拟小矢量VVS2。
改进式虚拟中矢量的定义:使用小矢量ONN,PPO以及中矢量PON合成改进式的虚拟中矢量。

矢量ONN作用时产生的中点电流为ia,矢量PON作用时产生的中点电流为ib,矢量PPO作用时产生的中点电流为ic。则改进的虚拟中矢量VIVM1在其作用时间TIVM1内,流出逆变器中点的电荷为

根据式(4)可得出如下结论:
1)当kM1=1/3时,虚拟中矢量在空间矢量图中的位置及坐标如图3所示,A大区内小区的分区方法如表4所示。此时流出逆变器中点的电荷为零,所以kM1=1/3时虚拟中矢量对中点电位没有影响。这与传统的VSVPWM调制方法中的虚拟中矢量的定义一样。理论上该虚拟中矢量对中点电位没有影响,但是当中点电位发生波动时,却无法有效地对其进行调节。
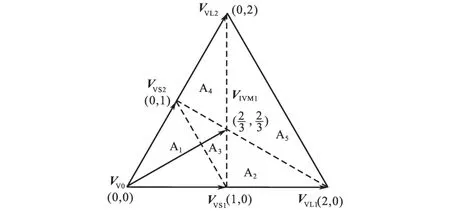
图3kM1=1/3时的三电平空间矢量图Fig.3 Three level space vectors diagram whenkM1=1/3

表4kM1=1/3时A区内小区的判断规则Tab.4 Judgment rule in first sextant whenkM1=1/3
2)当kM1=1/6时,改进的虚拟中矢量在空间矢量图中的位置及坐标如图4所示,A大区内小区的分区方法如表5所示。此时流出逆变器中点的电荷为

如果ic>ia,则QIVM1>0,电流流出逆变器,直流上侧电容电压因充电而升高,直流下侧电容电压因放电而降低。
如果ic<ia,则QIVM1<0,电流流入逆变器,直流上侧电容电压因放电而降低,直流下侧电容电压因充电而升高。
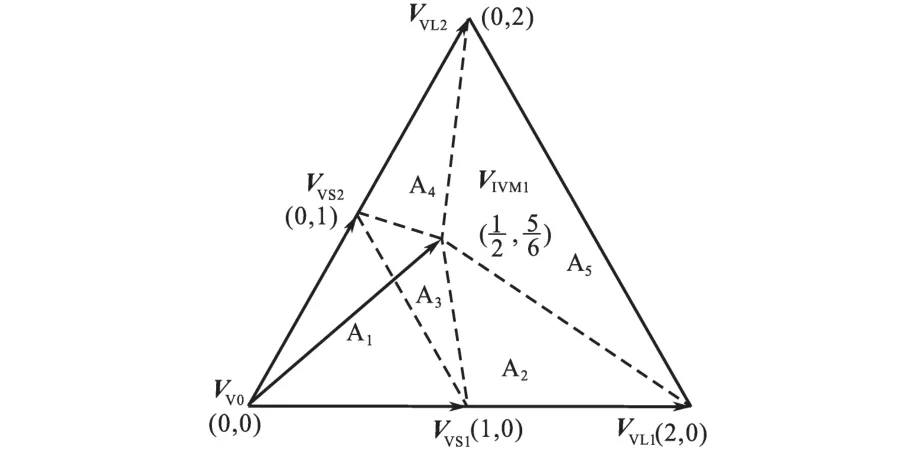
图4kM1=1/6时的三电平空间矢量图Fig.4 Three level space vectors diagram whenkM1=1/6

表5kM1=1/6时A区内小区的判断规则Tab.5 Judgment rule in first sextant whenkM1=1/6
3)当kM1=1/2时,改进的虚拟中矢量在空间矢量图中的位置及坐标如图5所示,A大区内小区的分区方法如表6所示。流出逆变器中点的电荷为


图5kM1=1/2时的三电平空间矢量图Fig.5 Three level space vectors diagram whenkM1=1/2
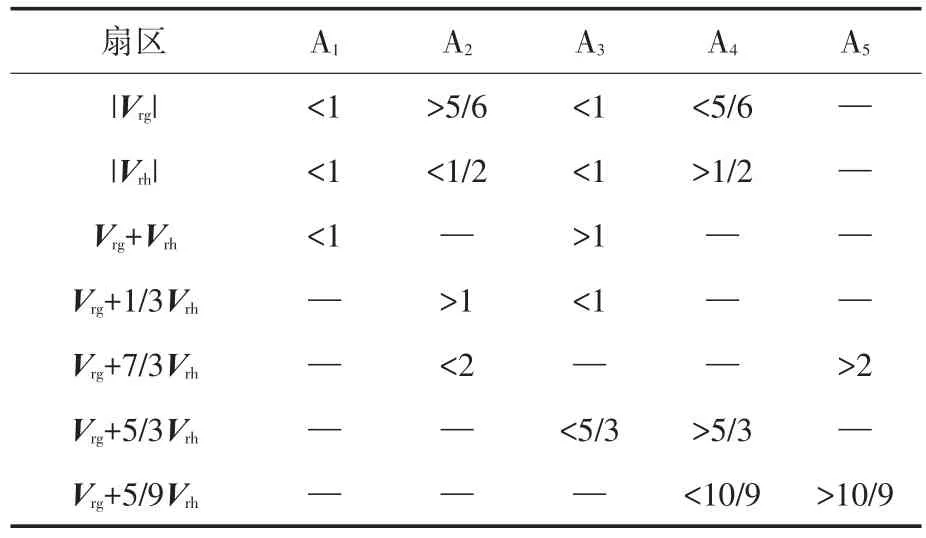
表6kM1=1/2时A区内小区的判断规则Tab.6 Judgment rule in first sextant whenkM1=1/2
3.2 逆变器中点电压平衡控制策略
由上述分析可知,对于虚拟小矢量,可以通过选择合适的kS1来调节中点电压的平衡;对于虚拟中矢量,kM1=1/3时虚拟中矢量对中点电位没有影响,而kM1=1/6时虚拟中矢量对中点电位的影响与kM1=1/2时相反,因此可以根据中点电压以及输出电流的大小,在下一开关周期Ts内动态地选择kM1的值,来控制中点电压的平衡。本文以A区为例阐明控制逆变器中点电压平衡的方法,其它区可以以此类推。
3.2.1 A1区中点电压平衡控制策略
当参考矢量Uref落在A1区时,流出逆变器中点的电荷为

产生的中点电压的偏移为

当检测到逆变器的中点电压偏差为ΔU时,则要在下一个开关周期Ts内产生1个-ΔU来平衡中点电压的波动,如下式:

则根据下式可求出kS1和kS2的值,并在下一开关周期内使用kS1和kS2的值参与合成虚拟小矢量。

3.2.2 A2~A5区中点电压平衡控制策略
当参考矢量Uref落在A2~A5区时,可以使用本文提出的改进的虚拟中矢量来控制逆变器中点电压的平衡。根据检测到的中点电压偏移值ΔU以及输出的电流大小,选择合适的kM1值来平衡中点电压。
具体的控制过程如下:1)当ΔU>0时,说明直流下侧电容需要放电。若ic>ia,则选择kM1=1/6;若ic<ia,则选择kM1=1/2。此时电荷会流出逆变器中点,使得中点电压降低;2)当ΔU<0时,说明直流下侧电容需要充电。若ia>ic,则选择kM1=1/6;若ia<ic,则选择kM1=1/2。此时电荷会流入逆变器中点,使得中点电压升高;3)当ΔU=0时,说明直流下侧电容既不需要充电,也不需要放电,选择kM1=1/3。
图6给出了整个控制策略的系统结构图,实现了三电平ANPC逆变器中点电压平衡的闭环控制。根据DSP实时采样得到的直流上、下侧电容电压值和三相负载电流大小之后,判断参考矢量的位置,若参考矢量在A1区内,则按照式(10)重新计算正负小矢量的分配系数,否则通过动态地选择kM1的值来控制中点电压的平衡。最后通过DSP计算产生相应的PWM开关序列,驱动功率开关器件的工作。
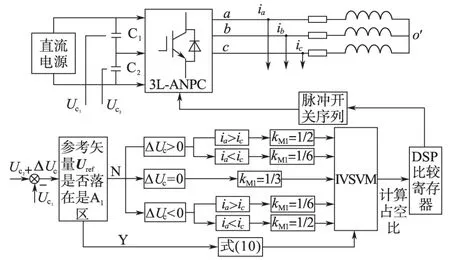
图6 控制策略的系统结构图Fig.6 System block diagram of control strategy
4 仿真和实验
4.1 仿真研究
为了验证本文所提出的用于控制中点电压平衡的改进式虚拟空间矢量调制策略的可行性和有效性,在Matlab中搭建了三电平ANPC逆变器的仿真模型进行验证,仿真参数为:直流母线电压200 V;直流侧电容4 700 μF;开关频率5 kHz;R-L负载R=11 Ω,L=4 mH;输出频率50 Hz。在调制度m=0.8时,对传统的SVPWM和论文中提出的改进式虚拟空间矢量调制策略进行了仿真研究。
在调制度m=0.8时2种调制方法下得到的线电压波形和直流上、下侧电容电压的波形分别如图7和图8所示。
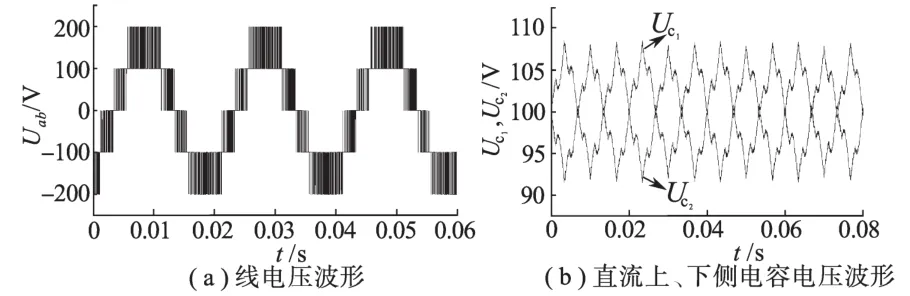
图7 SVPWM控制策略下的仿真波形Fig.7 Simulation results under SVPWM

图8 改进式VSVPWM控制策略下的仿真波形Fig.8 Simulation results under improved VSVPWM
对比图7和图8的仿真结果可以发现,传统的SVPWM方法作用时,直流上、下侧的电容电压分别分布在100 V上下波动,且波动的幅度较大,中点电压没有得到很好的控制;而使用本文提出的改进式虚拟空间矢量调制策略时,直流上、下侧电容电压的波形都均匀地分布在100 V上、下波动,且波动的幅度很小,中点电压得到了很好的控制,从而证明了本文所提出的控制策略的有效性。
4.2 实验研究
为了进一步验证本文所提出的控制策略的有效性,在实验室搭建了基于TMS320F28335 DSP和EPM1270T144I5N CPLD为核心的控制器平台,采用IRF840 MOSFET为主开关器件的三电平ANPC实验平台。实验平台技术参数与仿真一致,死区时间设置为4 μs。
和仿真一样,在调制度为0.8时,对传统的SVPWM和论文中提出的改进式虚拟空间矢量调制策略进行了实验研究。在调制度m=0.8时2种调制方法下得到的线电压波形和直流上、下侧电容电压波形分别如图9和图10所示。

图9 SVPWM控制策略下的实验波形Fig.9 Experiment results under SVPWM

图10 改进式VSVPWM控制策略下的实验波形Fig.10 Experiment results under improved VSVPWM
根据图9和图10的实验波形可以看出,传统的SVPWM控制策略作用时,直流上、下侧的电容电压分别分布在100 V上下波动,并没有达到平衡状态;而本文提出的改进式虚拟空间矢量调制策略作用时,直流上、下侧的电容电压波形几乎重合,且均匀地分布在100 V上、下波动,中点电压得到了有效的控制。实验波形证实了本文所提出的控制策略的有效性。
5 结论
本文提出了一种用于控制三电平ANPC逆变器中点电压平衡的改进式VSVPWM调制策略。该策略中虚拟小矢量由1对冗余的正、负小矢量合成,虚拟中矢量由原来的中矢量和与之相邻的2个正小矢量合成,当合成虚拟中矢量的3个基本矢量的分配系数不同时,虚拟中矢量会产生不同的中点电流,从而对中点电压有着不同的影响,因此本文重新定义了矢量的分配系数,选择3个不同的虚拟中矢量来控制中点电压的平衡。根据采样得到的中点电压偏移情况以及三相输出电流的大小,当参考矢量在A1区时,重新计算合成虚拟小矢量的正、负小矢量的分配系数;当参考矢量在A2~A5区时,选择对应的kM1值,即重新选择产生不同中点电流的改进式虚拟中矢量,从而达到动态地控制逆变器中点电压平衡的目的。该策略增强了中点电压平衡的控制效果,且克服了传统的SVPWM以及VSVPWM控制策略在某些区域内无法控制中点电压平衡的不足。
最后搭建了三电平有源中点钳位型逆变器的仿真模型和实验平台,对提出的控制策略进行了验证,仿真和实验结果证实了本文所提出的控制策略的有效性。
[1]Deng N,Wang P Y,Zhang X P,et al.A DC Current Flow Con⁃troller for Meshed Modular Multilevel Converter Multiterminal HVDC Grids[J].Power and Energ Systems Csee Journal of,2015,1(1):43-51.
[2]李勇,麦瑞坤,陆立文,等.一种采用级联型多电平技术的IPT系统谐波消除与功率调节方法[J].中国电机工程学报,2015,35(20):5278-5285.
[3]Bruckner T,Bemet S.Loss Balancing in Three-level Voltage Source Inverters Applying Active NPC Switches[C]//Power Electronics Specialists Conference,2001.PESC.2001 IEEE 32nd Annual.2001,2:1135-1140.
[4]王琛琛,李永东.多电平变换器拓扑关系及新型拓扑[J].电工技术学报,2011,26(1):92-99.
[5]刘云峰,何英杰,陈娟,等.二极管钳位多电平空间矢量与载波调制策略统一理论研究[J].中国电机工程学报,2015,35(5):1203-1210.
[6]Wang K,Xu L,Zheng Z,et al.Capacitor Voltage Balancing of a Five-level ANPC Converter Using Phase-shifted PWM[J].IEEE Transactions on Power Electronics,2015,30(3):1147-1156.
[7]王奎,郑泽东,李永东.五电平有源中点钳位型逆变器母线中点电压平衡问题[J].中国电机工程学报,2012,32(3):30-35.
[8]Videt A,Le Moigne P,Idir N,et al.A New Carrier-based PWM Providing Common-mode-current Reduction and DC-bus Balancing for Three-level Inverters[J].IEEE Transac⁃tions on Industrial Electronics,2007,54(6):3001-3011.
[9]Mohzani Z,McGrath B P,Holmes D G.A Generalized Natural Balance Model and Balance Booster Filter Design for Threelevel Neutral Point Clamped Converters[C]//Energy Conver⁃sion Congress and Exposition(ECCE),2014 IEEE.IEEE,2014:211-218.
[10]Tan G,Deng Q,Liu Z.An Optimized SVPWM Strategy for Five-level Active NPC(5L-ANPC)Converter[J].IEEE Trans⁃actions on Power Electronics,2014,29(1):386-395.
[11]张瑾,齐铂金,张少如.Z源三电平中点钳位逆变器的空间矢量调制方法[J].电工技术学报,2010,25(9):108-116.
[12]Monge S B,Somavilla S,Bordonau J,et al.Capacitor Voltage Balance for the Neutral-point-clamped Converter Using the Virtual Space Vector Concept with Optimized Spectral Perfor⁃mance[J].IEEE Transactions on Power Electronics,2007,22(4):1128-1135.
[13]胡存刚,王群京,李国丽,等.基于虚拟空间矢量的三电平NPC逆变器中点电压平衡控制方法[J].电工技术学报,2009,24(5):100-107.
[14]桂石翁,吴芳,万山明,等.变虚拟空间矢量的三电平NPC变换器中点电位平衡控制策略[J].中国电机工程学报,2015,35(19):5013-5021.
[15]范波,谢冬冬,赵伟刚.基于VSVPWM的三电平中点电位补偿平衡控制[J].电气传动,2014,44(7):38-43.
[16]Brückner T,Bernet S,Steimer P K.Feedforward Loss Control of Three-level Active NPC Converters[J].IEEE Transactions on Industry Applications,2007,43(6):1588-1596.
VSVPWM Strategy for Three-level Active NPC Inverter Neutral Point Potential Balance
MA Dajun1,HU Cungang1,2,3,WANG Qunjing2,3,ZHANG Chao1
(1.School of Electrical Engineering and Automation,Anhui University,Hefei230601,Anhui,China;2.Anhui Provincial Collaborative Innovation Center of Industrial Energy Saving and Power Quality Control,Anhui University,Hefei230601,Anhui,China;3.Engineering Research Center of Power Quality,Ministry of Education,Anhui University,Hefei230601,Anhui,China)
TM464
A
10.19457/j.1001-2095.20170906
国家自然科学基金资助项目(51307002);安徽省高校自然科学研究重大项目(KJ2016SD02)
马大俊(1993-),男,硕士研究生,Email:mdj18769@163.com
2016-07-26
修改稿日期:2016-10-18
猜你喜欢
现代电影技术(2022年1期)2022-02-15
自动化与仪表(2021年10期)2021-10-26
中学生数理化(高中版.高考数学)(2021年4期)2021-07-20
学苑创造·C版(2018年3期)2018-05-28
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年22期)2016-04-12
电测与仪表(2016年17期)2016-04-11
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
商场现代化(2015年2期)2015-03-11
