
基于分布式检测的多分支输电线路故障精确定位技术
2017-10-09 08:42:56苏彪于建友郑益慧李立学王昕杨景波
电气自动化 2017年3期
苏彪,于建友,郑益慧,李立学,王昕,杨景波
(1.上海交通大学电子与电工技术中心,上海 200240;2. 国网吉林省电力公司白山供电公司,吉林 白山 134300)
基于分布式检测的多分支输电线路故障精确定位技术
苏彪1,于建友2,郑益慧1,李立学1,王昕1,杨景波2
(1.上海交通大学电子与电工技术中心,上海 200240;2. 国网吉林省电力公司白山供电公司,吉林 白山 134300)
为解决多分支复杂输电线路故障精确定位的难题,分析了故障行波过程及其检测要求。设计了适用于输电线路安装使用的分布式行波检测单元并提出针对多分支输电线路的基于分布式检测的故障定位新方法。只需要利用故障初始行波波头到达检测点的时间,根据初始行波波头到达各检测点的时间即可确定故障支路,再结合检测点的安装位置利用逐级递归双端法精确定位故障发生位置。理论和仿真表明,分布式故障定位技术很好地解决了多分支输电线路故障定位的问题,同时实现了故障时波速的实时测量,消除了波速不确定性带来的误差,定位精度高。
输电线路;多分支;分布式检测;初始行波;故障定位;波速
Abstract: In order to solve the problem of precise fault location on complex multi-branch transmission lines, this paper analyzes fault traveling wave process and its detection requirement. On this base, it designs a distributed traveling wave detecting unit suitable for installation on transmission lines, and presents a novel fault location method based on distributed detection for multi-branch transmission lines. For this method, time of arrival of fault initial traveling wave range at detection points is all needed for determination of the fault branch. Then, the fault position is preciously determined by double-end step-by-step recursion under consideration of installation positions of detection points. Theoretical analysis and simulation indicate that this distributed fault location technology can solve the problem of fault location for multi-branch transmission lines, realize real-time measurement of wave velocity during fault, eliminate errors caused by uncertainty of the traveling wave velocity and achieve high location accuracy.
Keywords: transmission line; multi-branch; distributed detection; initial traveling wave; fault location;wave velocity
0 引 言
高压输电线路是电力系统运行的大动脉,是发电厂和终端用户之间联系的纽带,担负着输送电能的重要任务,同时它又是电力系统中最脆弱、最容易发生故障的地方[1]。随着我国电力工业的持续高速发展,以信息化、自动化、互动化为特征的“坚强智能电网”建设也已经开始实施[2-3],其要求电网具有自愈能力,这就必须要有复杂灵活的电力网络结构以便通过其他连接来恢复供电、同时隔离故障。因此,电力系统输电网络结构日益复杂,T型分支(单分支)甚至2分支、3分支等多分支输电线路作为复杂电力网络结构的基本单元已经越来越常见,并且会得到更广泛的应用[4-6]。
在这种情况下,已投入使用的输电线路故障定位技术在输电线路具有多分支的情况下已经很难保障定位精度甚至完全无法实现故障定位。传统的行波测距方法的可靠性和精度不受线路类型、系统运行方式、故障电阻及两侧系统的影响,但是其只适用于单条线路,无法解决多分支线路的故障定位问题,同时行波波速取值的不确定性也会导致测距精度降低。
因此,本文提出基于分布式检测的多分支输电线路故障精确定位技术,通过分布式检测技术和传统行波法相结合实现多分支输电线路故障的精确定位。该方法采用分布式检测技术,仅需要识别最容易检测的故障初始行波波头,即可完成故障定位,克服了故障行波在多分支输电线路中存在复杂的折、反射过程而导致故障检测装置在识别行波波头时出现困难或者误识别的问题。同时,采用分布式检测技术,可以实现行波波速的在线测量和补偿,消除了行波波速不确定性对测距精度的影响。并且其定位精度不受线路类型、系统运行方式、过渡电阻的影响。
1 分布式检测单元
当输电线路发生接地故障时,将产生从故障点向线路两端传播的电流和电压行波。故障暂态行波具有比较宽的频带,从几千赫兹到几百千赫兹,经过普通互感器等高压设备时会产生畸变。因此,要得到不失真的故障行波信号所用的传感器必须具有足够的带宽。罗氏线圈传感器的带宽可以达到1 MHz以上,完全可以满足暂态故障行波传感的带宽要求,可以不失真地传感暂态故障行波信号。本系统所用的分布式球体行波检测单元(DFDU, Distributed Fault Detection Unit on Transmission Line)组成如图1所示,检测单元电源模块由高效取电线圈、超级储能电容以及电源管理电路组成,可以给系统提供稳定可靠的供电。罗氏线圈作为电流传感器,并将得到的电流信号输入到信号调理电路再输出到A/D转换采样模块。以电流的变化率di/dt作为采样触发模块的输入值,当输入值大于根据输电线路电流动态设定的阈值时,采样模块由正常情况下的低速采样模式切换到高速采样模式。主控芯片将高速采样下得到的故障行波信号进行信号处理,识别出行波波头到达检测点时间,再将该时间通过GPS信号发送系统主机。

图1 检测单元构成
2 分布式故障定位系统

图2 分布式故障定位系统组成
如图2所示,本文所研究的多分支输电线路故障定位技术是通过安装于输电线路的球体单元(DFDU)以及远程监控主机实现。球体单元DFDU主要由感应取电模块、电源管理电路、行波获取模块、微处理器、GSM远程通讯模块组成。其中,感应取电模块和电源管理电路为球体单元提供稳定的电源保证其持续稳定工作;行波获取模块和微处理器完成故障行波信号的获取和处理,最终通过GSM远程通讯模块将获得的行波初始波头到达球体单元的时间发送到监控主机。监控主机根据各球体单元的安装位置以及故障行波到达各球体单元传输的数据判断出故障线路分支,并通过该故障分支上的球体单元检测到故障行波的时间计算出故障发生的准确位置。然后将定位结果发送到检修人员的移动终端上,为实现快速检修提供保障。
2.1 故障支路的确定
解决多分支线路故障测距的关键是判断故障所在的支路。当故障发生时,定位系统首先要解决的问题就是根据分布式检测单元传回的数据判断出故障所在的支路。以图3所示的输电网络为例,该输电线路网络包含20条具体输电线路,编号分别为1~20号。每条输电线路上根据该输电线路长度的不同都装有若干球体检测单元,以7号输电线路MN(M、N分别为7号输电线路的首末节点)为例,其在线路上的具体安装如图4所示。其中,图4中的黄色球体即为线载球体检测单元(DFDU),其安装于每条输电线路上,相邻球体间隔10 km~20 km,每条线路的安装数目根据该输电线路长度确定。
本技术通过安装于各条输电线路上的球体单元来检测故障行波首次到达的初始行波浪涌,不用考虑行波复杂的折射和反射,只要捕捉故障行波的第一个波头,该初始行波幅值大,波头容易检测识别。当故障发生在线路MN上时,故障行波将由故障点向线路两端M、N传播,因此,最先检测到故障行波信号的必为线路MN上所安装的球体检测单元。因此,系统主机根据该输电网络中各球体单元首次检测到故障行波时间即可判断出故障分支,最先检测到故障行波的球体单元所在的线路分支即为故障发生的线路分支。

图3 多分支输电线路网络图
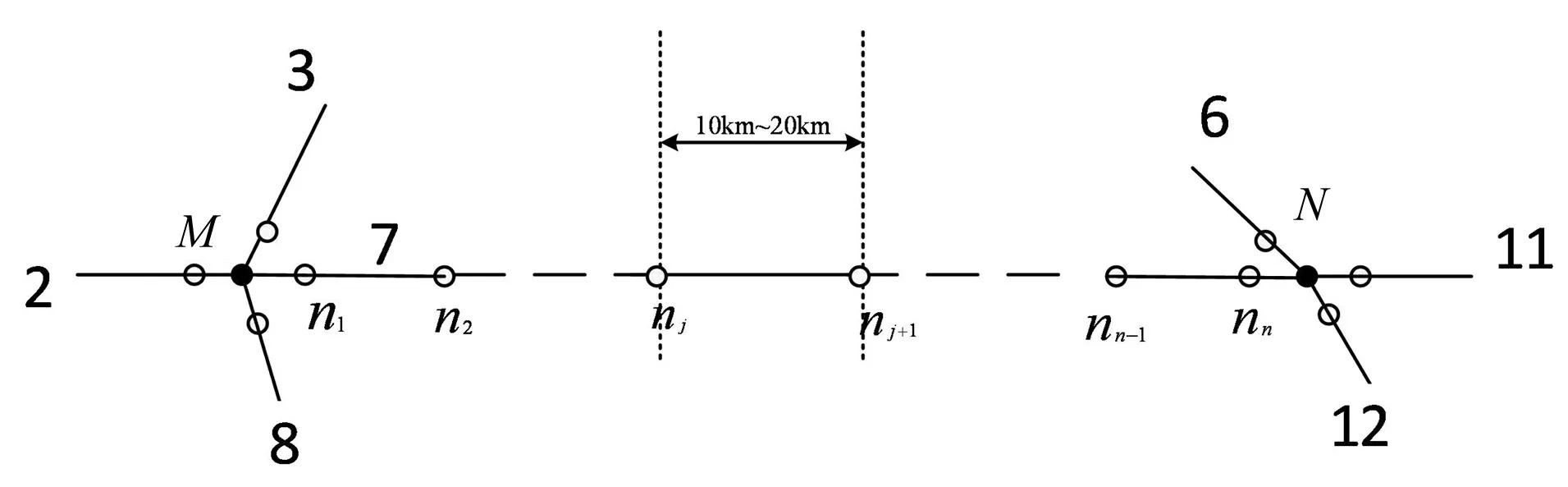
图4 球体单元线路分布示意图
2.2 故障点的定位
确定了多分支线路中故障发生的线路分支之后,根据线路上安装的检测单元(DFDU)所发回的检测结果即可计算出故障点位置。以图3中的7号输电线路MN为例说明,M、N分别为7号输电线路的首末节点,如图4所示,输电线路MN上共装有n个球体检测单元,编号为n1~nn,其中n1位于输电线路MN首端,nn位于输电线路MN末端。以线路MN故障为例进行说明:
1)故障发生在节点M和n1号球体单元安装点之间
此时,故障行波均由分支节点流向线路,且节点M周围的四个球体单元必然比其它球体单元先检测到故障行波信号,由此即可判断出故障发生在节点M处,即可迅速确定故障位置。
2)故障发生在节点N和nn号球体单元安装点之间
此时,故障行波均由分支节点流向线路,且节点N周围的四个球体单元必然比其它球体单元先检测到故障行波信号,由此即可判断出故障发生在节点N处,同样可迅速确定故障位置。
以上两种情况均为故障发生在本线路的首末两端节点处,均可通过某一节点周围的球体单元率先检测到故障行波而快速确定故障位置位于该节点处。
3)故障发生在nj号球体单元安装点和nj+1号球体单元安装点之间
这种情况下,如2.1节所述,系统根据该线路上的球体单元最先检测到故障行波信号这一判据就可以确定该分支线路为故障发生支路。然后根据该线路上的n个球体单元传回的数据,采用逐级递归双端法精确定位故障位置。
故障行波从故障点分别向左右两端传播,其中n1~nj号球体单元检测到向左侧传播的故障行波信号,nj~nj+1号球体单元检测到向右侧传播的故障行波信号,然后利用故障点产生的初始故障行波到达各球体单元的绝对时间差来计算故障精确位置。传统双端行波法具体方法如图5所示。

图5 双端行波法原理图
设从故障点F向M侧传播的故障初始行波uFM到达检测点np(1 ≤p≤j)的时刻为tFp;从故障点F向N侧传播的故障初始行波uFN到达检测点nq(j+1 ≤q≤n)的时刻为tFq;行波的传播速度为v,相邻两球体单元的距离为ΔL,则:
(1)
式中lFp为故障点F到故障点左侧球体单元np的距离,lFq为故障点F到故障点右侧球体单元nq的距离。因此,由上述方程可以得到,故障点F到左右两侧np、nq号球体单元距离为:
(2)
其中Δtp,q=tFp-tFq,Δtq,p=tFq-tFp。
本文采用逐级递归双端法,利用故障点左侧第一近的监测点检测到故障行波的时间分别与距离故障点右侧第一近、第二近、…、第n近的监测点检测到故障行波的时间做差,故障点左侧第二近的监测点检测到故障行波的时间分别与距离故障点右侧第一近、第二近、…、第n近的监测点检测到故障行波的时间做差,依次类推,直到故障点左侧最远的监测点检测到故障行波的时间分别与故障点右侧第一近、第二近、…、第n近的监测点检测到故障行波的时间做差完成,然后分别用上述时间差完成故障定位,并将定位进行归一化平均之后转化为距离故障左侧第一近监测点的距离。这种逐级递归双端法消除了单个监测点测量误差或者错误对定位结果的影响,最大化的提高了双端定位的精度。
以故障发生在nj号球体单元安装点和nj+1号球体单元安装点之间为例说明,故障点左侧第一近的nj号监测点检测到故障行波的时间分别与距离故障点右侧第一近、第二近、…、第n近的监测点检测到故障行波的时间做差,进行故障定位。

(3)
由上式再求取平均值可以得到故障点距离nj号监测点的距离为:
(4)
依次类推,可得故障点距离左侧其他n1~nj-1号监测点的距离为:
(5)
再根据各监测点在输电线路上的安装位置,可以将上述距离均转化为故障点到左侧最近的检测点nj号监测点的距离并进行归一化处理:
lF,j=[lF,j+lF,j-1+…+lF,1-
(1+2+…+j-1)·ΔL]/j
(6)
最后,将故障点距离左侧其他n1~nj-1号监测点的距离带入式(6),可得到故障点距离故障左侧第一近监测点nj的距离,即最终的定位结果:
(7)
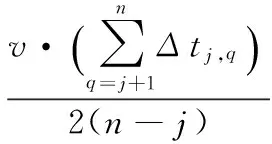
2.3 消除波速不同的影响

本文采用分布式检测技术,通过安装于输电线路上的分布式检测单元实现了行波波速的实时在线测量,可以有效地消除波速不同带来的影响。以图4中的输电线路MN为例说明,当故障发生在检测单元nj和nj+1之间时,除nj和nj+1之外,该线路上其他相邻检测单元之间的行波传输的时间差Δt与其安装间隔成正比,该安装间隔ΔL为一固定值,则实际波速v=ΔL/Δt。这样可以得到n-2组波速测量值,为提高测量准确度和可靠性,对这n-2组测量结果取平均值得到:
(8)
该波速即为故障发生时故障行波在线路上的实际传播速度。将此波速值带入式(7)即可得到不受波速变化影响的高精度定位结果。
3 仿真分析
本文选取一个具有四条支路的230 kV输电线路结构进行仿真验证,原理图如图6所示,在PSCAD中采用输电线路频依模型搭建的仿真模型。如图6所示,该输电线路模型共有四条线路,线路1、线路2、线路3和线路4长度分别为45 km、15 km、30 km和30 km。编号1~12为安装在输电线路上的分布式球体检测单元,从线路首端开始安装,同一条线路上球体单元的安装间隔相同,均为 15 km,其中1~4号球体检测单元安装于线路1;5、6号球体检测单元安装于线路2;7~9号球体检测单元位安装于线路3;10~12号球体检测单元位安装于线路4,故障点位于线路1上的检测点 2右侧10 km处,故障发生在系统启动后的0.02 s,故障持续时间为0.02 s。分布式检测单元在发生故障时的数据采样率为10 MHz,故障行波到达各检测点的时间如表1所示。

图6 PSCAD仿真线路结构图

检测点t/s10.020083320.020033330.020016840.020066850.020066860.020116870.020066880.020116790.0201667100.0200834110.0201333120.0201833
由表1可知,检测点2和3最先检测到故障初始行波,由此可以判断出故障发生在线路1上且故障区间为检测点2与检测点3之间。根据故障行波在线路1上的非故障区间检测点1和
检测点2之间,检测点3和检测点4之间传播的时间差,带入式(8)可以计算出故障发生时故障行波在本线路上传播的实时波速。然后运用逐级递归双端法,将该波速和故障初始行波到达本故障线路上四个检测点1、2、3、4号检测点的时间带入测距公式(7)中计算,可测得故障位置与检测点2之间的距离9.975 km,偏差仅为0.025 km,定位精度高。因此,本方法采用分布式检测单元实现故障时波速的实时测量,消除了波速不确定性带来的定位误差,结合逐级递归双端法提高了定位结果的可靠性和精确性。
4 结束语
提出了一种基于分布式检测的多分支输电线路故障精确定位技术,通过安装于输电线路上的球体检测单元检测故障初始行波,然后根据检测结果和球体单元的安装位置分析和计算出故障点的位置,分布式球体检测单元只监测故障初始行波到达的时间,即首个到达的故障行波信号。该初始行波信号强度最大,易于监测,成功地消除了行波复杂的折、反射所导致的行波测量识别误差。采用逐级递归双端法,通过多个检测点数据联合计算,提高了定位结果的精度和可靠性并消除了波速不确定性带来的定位误差,提高了定位精度,同时该定位精度不受线路类型、系统运行方式、过渡电阻的影响。
[1] 杜林, 庞军,司马文霞. 行波相关法的输电线路故障定位[J]. 高电压技术, 2008, 34(12):2637-2641.
[2] FARHANGI H. The path of the smart grid [J]. Power and Energy Magazine, IEEE, 2010, 8(1): 18-28.
[3] 张东霞,姚良忠,马文媛. 中外智能电网发展战略[J]. 中国电机工程学报,2013,33(31):1-15.
[4] NOVOSEL D, HART D G, UDREN E, et al. Unsynchronized two-terminal fault location estimation[J]. Power Delivery, IEEE Transactions on, 1996, 11(1): 130-138.
[5] 范新桥,朱永利,卢伟甫. 采用电流分布式测量和相位比较方式的输电线路故障定位[J]. 高电压技术,2012, 38(6):1341-1347.
[6] 束洪春,高峰,陈学允,等. T型输电系统故障测距算法研究[J]. 中国电机工程学报,1998,18(6):41-45.
Accurate Fault Location Technology for Multi-branch Transmission Lines Based on Distributed Detection
Su Biao1, Yu Jianyou2, Zheng Yihui1, Li Lixue1, Wang Xin1, Yang Jingbo2
(1. Center of Electronic & Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China;2. State Grid Jilin Electric Power Co., Baishan Power Supply Co., Baishan Jilin 134300, China)
10.3969/j.issn.1000-3886.2017.03.012
TM93
A
1000-3886(2017)03-0035-04
定稿日期: 2016-09-15
苏彪(1990-),男,陕西安康人,硕士生,主要研究方向为输电线路在线监测及故障定位。 郑益慧(1971-),男,黑龙江哈尔滨人,博士,教授,博导,主要从事电能质量与智能控制技术方面的研究工作。 李立学(1977-),男,湖北武汉人,博士,主要从事高压电气设备绝缘状态评估、故障诊断及智能化研究等方面的研究。 王昕(1972-),男,辽宁沈阳人,博士,副教授,主要从事电力负荷预测,无功规划;智能电网;可再生能源的分布式生产、传输、存储和接入技术等方面的研究。
猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:57:42
现代苏州(2022年9期)2022-05-26 01:34:49
文萃报·周五版(2022年9期)2022-03-11 00:24:12
消费电子(2020年5期)2020-12-28 06:58:27
成都信息工程大学学报(2018年1期)2018-05-31 08:40:38
池州学院学报(2017年5期)2018-01-23 02:54:31
计算机测量与控制(2017年6期)2017-07-01 16:23:28
Chinese Journal of Chemical Engineering(2016年10期)2016-05-26 09:28:34
中国交通信息化(2015年12期)2015-06-06 06:53:33
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:50
