基于DSP控制直流电机双闭环调速的研究
2017-09-27 01:28林森
山东工业技术 2017年19期
关键词:直流电机
摘 要:本文主要以数字信号处理器为主要控制手段设计的直流双闭环调速系统。双闭环调速主要是速度调节器,另一个是电流调节器。全控型的开关功率元件进行脉宽调制(PWM)控制形式变成当今的一种趋势。并且速度反馈元件选用霍尔传感器,通过检验霍尔传感器的指示灯与捕获端口来读取的状态是否一致。然后是数字信号处理器的自动调节脉冲宽度,输出脉冲,驱动电路后,控制电机的速度[1]。
关键词:直流电机;双闭环调速系统;霍尔传感器;DSP
DOI:10.16640/j.cnki.37-1222/t.2017.19.164
1 绪论
本文主要以直流电器为研究对象。我们希望采取工程设计方法来设计直流电机的速度,电流这2个方面的调速。这次是以DSP为基础的来设计直流电动机的动态结构图,我们做了研究[2]。在CCS3.3软件环境,对F28335的测试案例细细剖析,再次证明了这个控制方案的可行性。
2 系统的组成
根据反馈控制律,利用物理量的负反馈,在一定条件下保持负反馈量。然后,电流负反馈可以用来获得恒定的电流过程。所以,我们期待的是:启动过程只是当前负反馈,无速度负反馈;达到稳态速度后,只有速度负反馈,以防止当前负反馈发挥作用。为了让转速、电流负反馈都共同体现出自身在调节转速方面的价值,最初的想法是在系统中应用2个调节器。分别调节转速、电流。并且各自引入转速电流负反馈。两者之间的嵌套连接的实现。这构成速度,电流双闭环调速系统[3]。
3 双闭环直流调速系统的静特性分析
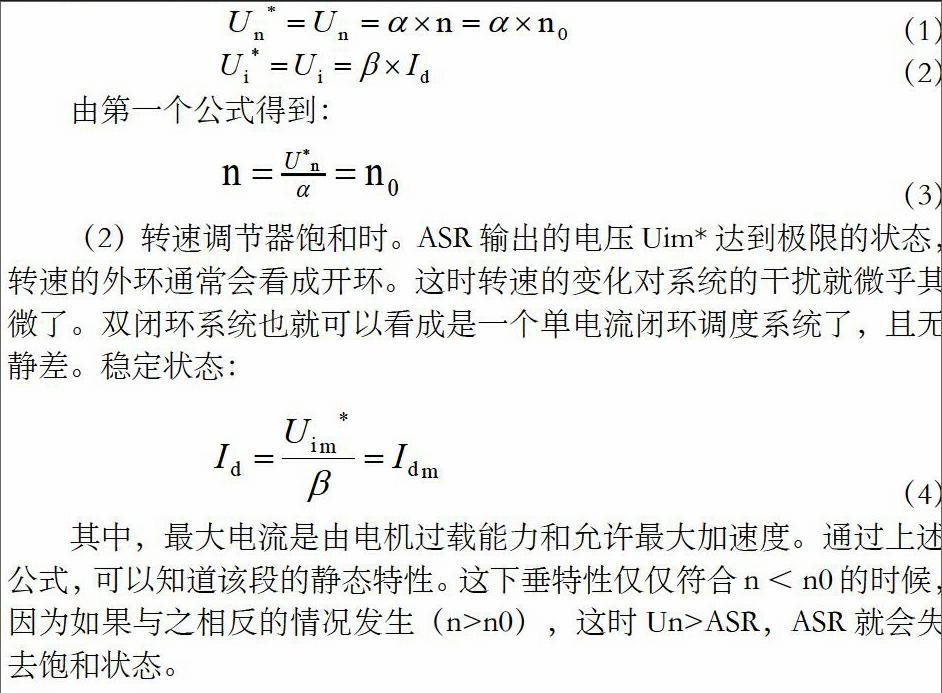
(1)转速调节器不饱时[4]。两个调节器都尚未达到其稳定状态。因此输入偏置电压为零。如此,
(2)转速调节器饱和时。ASR输出的电压Uim*达到极限的状态,转速的外环通常会看成开环。这时转速的变化对系统的干扰就微乎其微了。双闭环系统也就可以看成是一个单电流闭环调度系统了,且无静差。稳定状态:
其中,最大电流是由电机过载能力和允许最大加速度。通过上述公式,可以知道该段的静态特性。这下垂特性仅仅符合n
4 系统动态性能的分析[5]
参考单闭环调速所仿真的的模型,对双闭环控制的布局进行考量。参考单闭环调速所仿真的的模型,对双闭环控制的布局进行考量。
(1)第I阶段电流上升阶段(t~t1)。
1)骤然增加给定电压Un后,Id会上涨。并且当Id小于负载电流IdL时,此时电机不会运动。
2)当Id≥IdL,电机将会先转动。但是由于电机具有惯性,转速不会突然加快。因此,对转速调节器的输入偏置电压的值比较大。它的输出电压保持在限制的幅度U*im,迫使目前的快速增加。
3)当Id=Idm时,电流调节器迅速就抑制了Id的增长,这时这一阶段结束。
(2)第II阶段恒流升速阶段(t1-t2)。
1)在当前的阶段,ASR持续处在饱和状态。速度环等效于开环。在给定的恒定电流U*im下,系统成为一个调节系统。在这一点上,我们必需确保电流Id达到一个相对来说较为恒定状态。这也就让系统的加速度相对来说处于稳定状态,这也就使转速的增加呈正比(线性)。这时系统的加速度通常来说是不变的,转速呈线性增长(见图1)
2)同时,电机反电动势E也会按比例增加。相对于电流调节系统,E同样是线性缓慢增加的扰动量。为了克服干扰,ud0和UC也线性增长,以维持一个恒定的电流Id。
(3)第Ⅲ阶段转速调节阶段(t2以后)。
1)当速度增加到一个给定的n*=n0值,速度调节器的输入误差减小到0。但由于整体功能的影响,使输出保持在限位,所以电机继续加速。但只要我超过负荷电流IDL,车速的不断提高。直到ID = IDL,转速n达到高峰。(t=t3)
2)之后,电动机开始在负载的阻力下减速。此时,在t3-t4内Id 5 总结 恒流加速阶段从电流升至最大值起,到转速达到给定值为止。在这个阶段中,转速调节器一直饱和,转速环相当于开环状态,系统起到恒定电流调节作用,电流基本保持不变。因而电机控制系统保持加速度恒定,转速呈线性增长。在最后的转速调整阶段内,转速调节和电流调节都不饱和,两者同时起到调节作用,通过仿真及分析,系统达到了较好的效果。 参考文献: [1]汤天浩.电力传动控制系统运动控制系统[M].机械工业出版社,2010(04). [2]郭丙君.电力拖动与控[M].华东理工大学出版社,2012. [3]张斌.轨道交通电气传动控制系统[M].西南交通大学出版社,2013. [4]钱晓龙.电机传动控制技术[M].冶金工业出版社,2013. [5]潘月斗.電力拖动自动控制系统[M].机械出版社出版社,2014. [6]吴贵文.新运动控制系统[M].机械工业出版社,2014. 作者简介:林森(1986-),男,吉林人,硕士,助教,研究方向:电力电子与电力传动。
猜你喜欢
科学与财富(2019年11期)2019-08-06
电机与控制学报(2018年9期)2018-05-14
物联网技术(2016年12期)2017-01-21
科技视界(2016年4期)2016-02-22
计算技术与自动化(2014年1期)2014-12-12