
基于单片机的扫地机器人调速系统设计
2017-09-23 02:47唐如龙
装备制造技术 2017年7期
唐如龙
基于单片机的扫地机器人调速系统设计
唐如龙
(南华大学创新创业学院,湖南衡阳421001)
随着智能技术的快速发展,智能机器人的应用越来越广泛。为了提高扫地机器人的工作效率,本文研究了基于单片机的扫地机器人调速系统设计。首先介绍了清扫机器人系统结构,并在此基础上了设计了扫地机器人调速控制系统。
单片机;扫地机器人;调速系统;设计
自进入二十一世纪以来,伴随着计算机技术的进步和不断发展,人们逐渐在能实现控制模式的传统机器中添加了处理器,其中应运而生的控制机器就包括清扫机器人[1]。通过这种清扫机器人的使用,使得人们逐步摆脱繁重和重复的体力劳动,不仅如此,清扫机器人还具有良好的环境适应性和相对较高的智能水平,逐渐被人们所关注和接受,因此对清扫机器人进行深入的研究具有现实意义。
本文针对清扫机器人,在单片机基础上,设计了三轮式结构机械平台,对硬件电路进行了设计和制作,通过计算机软件对硬件控制程序进行了编写,实现并完善了环境自动清扫功能。不仅如此,本文还基于研究的结果,开展了路径规划的深入探讨,将策略类路径规划算法在清扫过程中使用,使机器人的清扫效率得到显著提升。
1 清扫机器人系统结构
从组成结构上来说,清扫机器人一共包含六个模块,分别为机器人壳体、信息采集、运动模块、清扫模块、决策模块以及电源模块。从外观上来说,清扫机器人仅有9 cm高,整机的机身直径为35 cm;从机械本体来说,清扫机器人的组成部分包括硬质塑料外壳、底盘(硬质塑料为高强度的)以及单自由度碰撞板。在运动过程中,要注意清扫机器人有灵活运动的需求,在转弯时要确保不能与周围物品有刮碰的动作,因此,选择圆形作为清扫机器人的本体形状。
移动机器人的移动方式一般有三种,分别为履带式、轮式和腿式[2]。其中腿式属于仿生学结构的一种,在腿式移动机器人的行进过程中,多为离散的落点,环境适应性很强,对于相对比较复杂的环境都能很好的适应;履带式机器人是在轮子上环绕一圈环形履带,相对具有较小的对地压力,在松软的地面上也能很好的行进,但其缺点是运动较不灵活;最常见的清扫机器人为轮式机器人,不仅具有简单的结构,而且移动速度相对较快,同时还具有控制方便的优点。
从工作环境方面来说,清扫机器人多在室内使用,室内一般具有平整的地面以及相对简单的地面环境,所以大多选择轮式结构的机器人。这种机器人部件结构示意图如图1所示。由图1可知,该机器人的移动机构为三轮式,电机包括两个,分布在左右两侧,左右驱动轮的运动是由齿轮带动,通过对其输入脉冲频率的调节,把不同的速度赋予到驱动轮只上,实现机器人的转弯、前进以及后退功能。在清扫机器人的正前方还添加了起到支撑辅助作用的万向轮,在左转和右转过程中,能发挥出随动性,避免影响到主动轮的转弯。
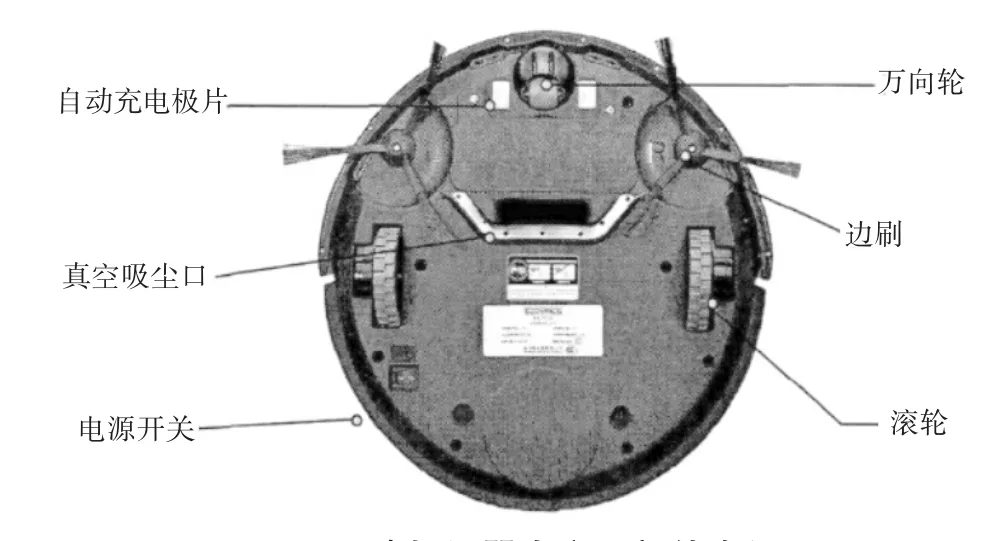
图1 清扫机器人主要部件介绍
采集信息主要是为了对外界环境进行感知,达到避障和测距的目的。采集信息的实现方式包括对行程开关的碰撞以及红外距离传感器的使用,红外距离传感器分别安装在机器的左边、右边以及正前方,对这三个方位测量距离。一般来说,红外传感器存在着相邻漫反射的盲区,为了弥补这一缺憾,可以把一个自由度碰撞板安装在机器人的前端,同时把两个碰撞行程开关分别安装在碰撞板的两侧[3-6]。那么在行进过程中,如果清扫机器人探测到有障碍物存在,碰触行程开关将开启,达到信息采集的目的。
在清扫机器人中,清扫模块是执行模块,在一定程度上能影响到机器人的清扫效果,该模块由两个边刷组成,分布在该模块的左右两侧,此外该模块还包含有吸尘盒以及一个吸尘电机。
2 扫地机器人调速控制系统设计
面对目标,机器人首先完成定位操作,通过自动调速功能才能更准确的到达指定位置,驱动电机可以实现机器人的移动。从电机本身来说,同步转速决定了电机的驱动速度,式(1)给出了具体的表达式:

在上式中,电动机转速以及同步转速分别用n和n0来表示,转速差率用s来表示,电机的频率从一定程度上决定了电动机的同步转速,式(2)给出了其具体的表达式:

在上式中,电动机的输入频数以及磁极对数分别用f和p表示,与式(1)、(2)相结合可以得到式(3):

从上式中可以知道,当达到一定的磁极对数时,电机的调速可以通过电机频率的改变来实现,图2给出了变频调速的设计示意图。

图2 电动机变频调速系统框图
单片机为变频调速系统的核心,电动机的速度可以通过转速监测反馈信息实现变频控制,并在外围设备中显示具体的速度。该单片机主要针对监测速度处理具体的反馈信息,并实现对控制参数的更新,进而完成机器人速度的闭环控制,图3给出了最小系统的电路图。由图3可知,电路图主要包含三个方面内容,分别为晶振电路、下载端口以及复位电路。前者用于维持机器人的工作稳定性;下载端口用于对反馈信息数据的修改和利用;复位电路用于实现实习单片机的复位。

图3 单片机最小系统设计图
STC89C52RC基本结构图如图4所示,这种产品作为位微控制器,不仅性能较高,同时还具有低能耗的特点,改进之后还添加了一些功能,使性能得到提升。
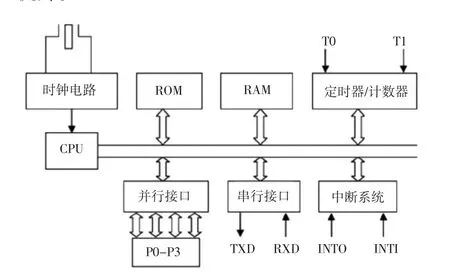
图4 STC89 C52RC基本结构图
4 结束语
一般而言,清扫机器人具有小巧的结构,同时还拥有操作简单、结构小巧等优点,不仅能很好的适应环境,还能达到一定的智能水平,目前在生活中已经得到广泛的关注和应用,具有较为广阔的应用前景。不仅如此,清扫机器人的相关技术还能在收割以及防雷机器人上应用,对于这些更深入的研究具有一定的指示意义。
[1]简毅,张月.移动机器人全局覆盖路径规划算法研究进展与展望明[J].计算机应用,2014,34(10):2844-2849.
[2]周志景,冯龙生.基于ARM的清洁机器人定位控制系统设计[J].工业控制计算机,2014,27(3):121-130.
[3]李宗学,范文学.基于ARM处理器的吸尘机器人硬件设计[J].现代电子技术,2013(6):103-105.
[4]朱贵国,汪党.基于STM32单片机的直流电机调速系统设计闭[J].数字技术与应用,2013(05):2-3.
[5]Baek S,Lee T K,Se-Young O H,etc.Integrated on-line localization,mapping and coverage algorithm of unknown en vironments for robotic vacuum cleaners based on minimal sensing[J].Advanced Robotics,2011,25(13-14):1651-1673.
[6]Goel D,Case J P,Tamino D,etc.Systematic floor coverage of unknown environments using rectangular regions and local ization IEEE/RSJ International Conference certainty[C]//Intel ligent Robots and SystemsOROS),2013on.2013:1-8.2013.11: 3-7.
Design of Speed Regulation System of Sweeping Robot Based on MCU
TANG Ru-long
(South China Institute of Innovation and Entrepreneurship,Hengyang Hunan 421001,China)
With the rapid development of intelligent technology,the application of intelligent robot is more and more widely.In order to improve the efficiency of sweeping robot,this paper studied the design of speed control system of sweeping robot based on MCU.Firstly,the structure of cleaning robot system is introduced,and based on this,the speed control system of sweeping robot is designed.
MCU;sweeping robots;speed control system;design
TP242
A
1672-545X(2017)07-0116-03
2017-04-15
唐如龙(1979-),男,湖南衡阳人,实验师,硕士,主要从事电子技术理论和工程实践教育的研究。
猜你喜欢
故事作文·低年级(2022年10期)2022-12-31
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
小学生学习指导(低年级)(2019年4期)2019-04-22
