基于嵌入式图像识别技术的空间小位移测量
2017-09-23 02:57:19王天正芦竹茂王千山张兴忠
计算机应用与软件 2017年9期
王天正 李 扬 芦竹茂 王千山 张兴忠
1(国网山西省电力公司电力科学研究院 山西 太原 030001)2(国家电网公司信息通信分公司 北京 100761)3(太原理工大学计算机科学与技术学院 山西 太原 030024)
基于嵌入式图像识别技术的空间小位移测量
王天正1李 扬2芦竹茂1王千山3张兴忠3
1(国网山西省电力公司电力科学研究院 山西 太原 030001)2(国家电网公司信息通信分公司 北京 100761)3(太原理工大学计算机科学与技术学院 山西 太原 030024)
监测GIS(Gas Insulated Switchgear)组合电器母线舱空间位置状态变化情况是保证GIS组合电器系统安全稳定运行的重要环节。针对户外GIS组合电器母线舱空间位移形变工况监测存在的问题,并基于单目视觉测距方法,提出一种基于嵌入式系统的空间小位移测量方法。设计了两种视觉识别标识,简化了识别过程。通过对摄像头采集的图像进行处理,使用视觉标识获取被测对象的空间小位移,实现对GIS母线舱三维空间位移的非接触式测量。该技术可避免复杂的摄像头系统标定和大量的比对计算,在空间小位移测量应用中有一定的参考价值。
GIS组合电器设备 单目视觉 非接触测量 视觉识别标识 小位移
0 引 言
GIS气体绝缘密封式组合电器设备,由于其占地面积小、安全性强、维护工作量小等特点,现已广泛应用于不同电压等级的电力变电站中。GIS设备日常运维中需要对母线舱空间位置变化进行实时监测预警,以保证GIS系统的安全稳定运行。根据不同厂家的设计,在波纹补偿器的保护下,母线舱的安全形变一边小于±10 mm,因此测量装置的量程应当大于±13 mm,分辨率小于0.5 mm[1]。目前国内外研究领域所关注的主要测距技术有激光测距、超声波测距和计算机视觉测距[2]。激光测距是一种高精确度的测距方式,但由于激光测距对设备的安装和运行环境有很高的要求,在露天环境的实际操作中难以达到要求,且激光测距不能直接实现对三维空间的位移测量。超声波测距技术是众多测距技术中相对较为成熟的一种,在距目标3~5 m时效果较好,若距离小于1 m,则测量误差较大,不适合在狭小空间使用。计算机视觉测距属于典型的非接触式测量方式,在制造行业已经得到了广泛应用[3]。基于嵌入式系统与图像识别技术进行空间小位移测距装置的开发,能够有效地发挥其功能强、功耗低、运行稳定、安装便捷的特点。
1 图像识别的基本原理
在基于图像识别的空间位移测量中,垂直于光轴方向的位移一般通过比对图像中某一特征区域的前后位置变化获取。相对而言,获取平行于光轴方向的目标距离信息较为复杂。
如图1所示,根据小孔成像原理,任意点P1在图像中的投影位置P2。(Xc,Yc,Zc)为P1在世界坐标系下的坐标,(x,y)为P1点在摄像头坐标系下的坐标[4]。

图1 小孔成像原理图
在将摄像头采集到的图像转化为数字图像存储的过程中,需要将图像投影到二维平面直角坐标系下,并在图像中心点(u,v)建立相对应的物理坐标系[5]。通过计算,可以得到世界坐标系下P1点坐标和摄像头成像面上P2点的坐标对应关系:
(1)
其中ax=f/dx,ay=f/dy。dx、dy分别为单个像素在X、Y方向上的实际物理大小。
通过采集多个点的信息,可以间接地获得目标距离信息:

(2)
从式(1)、式(2)中可知,空间位移测量的关键是找到所需的特征点。在已知摄像头焦距的情况下,通过特征点即可获得计算所需的dx、dy,并进一步获取目标距离信息Lc。
图像特征提取的一般过程为:局部平滑处理、基于区域进行分割、提取区域内的图像特征信息,如灰度直方图等。特征提取是目前在计算机视觉中广泛使用的处理技术,特征提取得到的主要信息为被测量物体本身材质的物理表面纹理特性[6]。
从提取出的信息中选取较为稳定的数据,作为特征信息用作比较[7]。然而,采用上述的图像识别算法,产生的信息量大、占用资源多、运算时间久、耗能高,与低功耗设计思路不符。
为了满足嵌入式系统的设计要求,设计并制作了两种针对不同环境的识别标识,分别以标识边缘、形心的相对位置信息作为特征信息。在处理过程中,可以在较短的工作时间内获得测量空间位移的全部特征数据信息,可以获得适应性较强、稳定性良好的识别效果[8]。然而,采用的摄像头存在桶形畸变,需要对获得的数据进行一定的处理来消除误差[9]。
2 视觉标识设计
设计附着于被观测设备表面的标识,通过识别标识来获取图像的位置信息,避免了对自然背景的识别与处理[10]。使用这种方法,能够降低程序所需的运行空间,并提高运行速度和识别效率。在开发过程中,考虑到不同的工作条件与环境,设计了两套针对性有所不同的标识,分别为井字形条带格与四点阵列标识。
2.1 井字形条带格
图2所示是井字形条带格标识(以下称标识1),其物理尺寸如图所示。计算方式为识别黑色条带的下边缘和右侧边缘,测量出图像中水平和垂直两个方向上条带的间隔,与标识本身的实际尺寸进行比较,确定边缘间的空间位置关系,计算在相应方向上的单个像素点所代表的物理大小。对比前后图像特征信息,获得GIS设备空间位置变化信息。
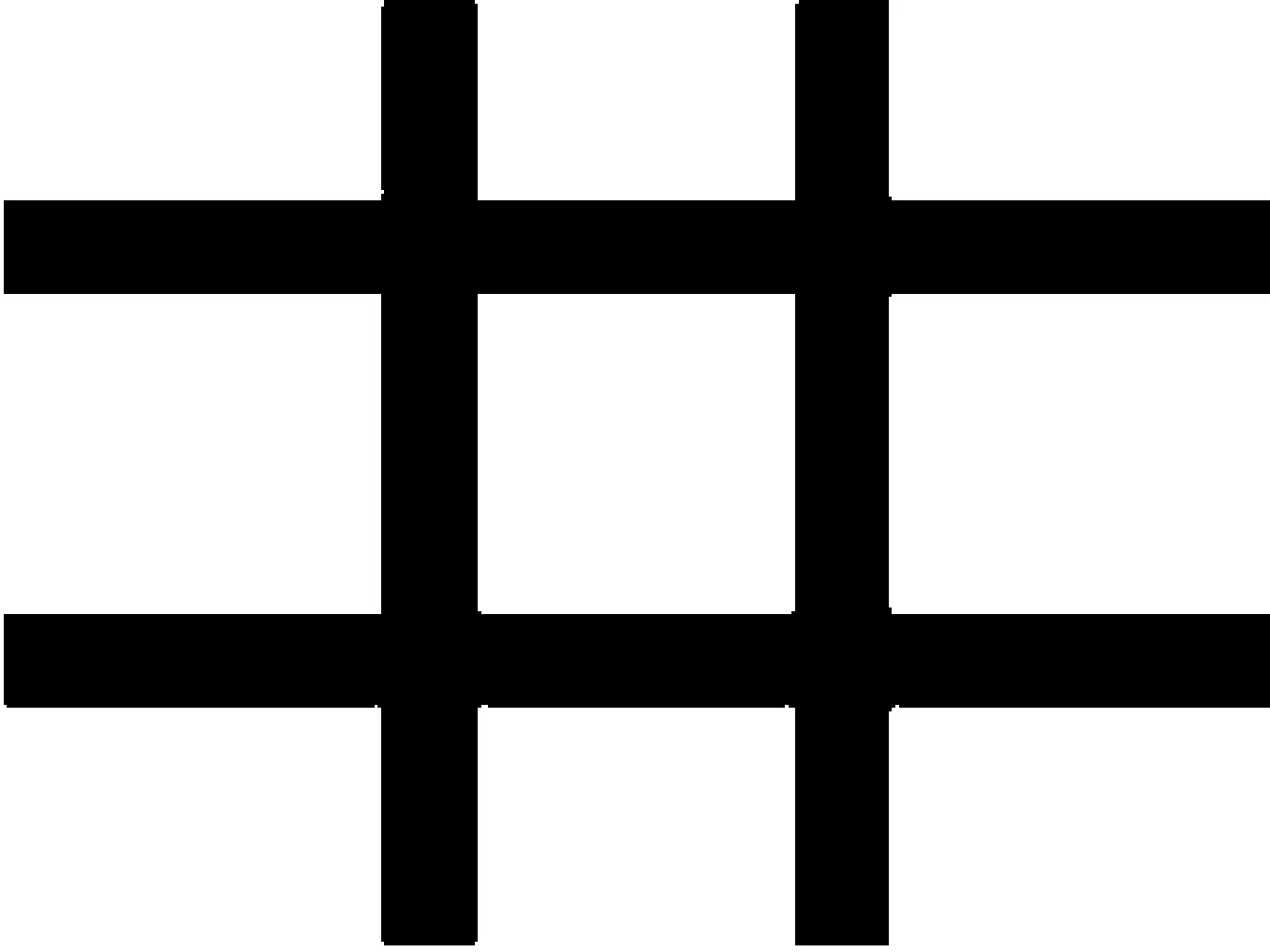
图2 井字形条带格标识
2.2 四点阵列标识
图3为四点阵列标识(称标识2)的PCB板图,其物理尺寸如图中所示。电路中,将4枚LED灯的阴极引出,便于之后连接控制使用。

图3 四点阵列标识PCB板图
该标识的识别原理是找到4个LED灯在图像中的对应空间位置关系,计算获得在相应方向上的单个像素点所代表的物理大小。对比图像前后特征信息,获得GIS设备空间位置变化信息。
将标识1和标识2组合形成组合标识,可以保证在多种工作环境下获得良好的识别效果。
3 视觉标识位置信息的获取
视觉位移测量的完整识别过程包括:通过摄像头采集图像、图像预处理、图像特征提取、处理特征信息,获得计算所需的特征点信息,进而计算位图图像中独立像素点在X、Y方向上所代表的实际物理大小;比对前后帧图像中的特征点信息,分别计算出目标在世界坐标系下,空间各方向上的位移情况。
3.1 视觉标识识别流程
如图4所示,视觉识别标识的识别算法可以划分为图中步骤,最终得到实际的空间位移大小。
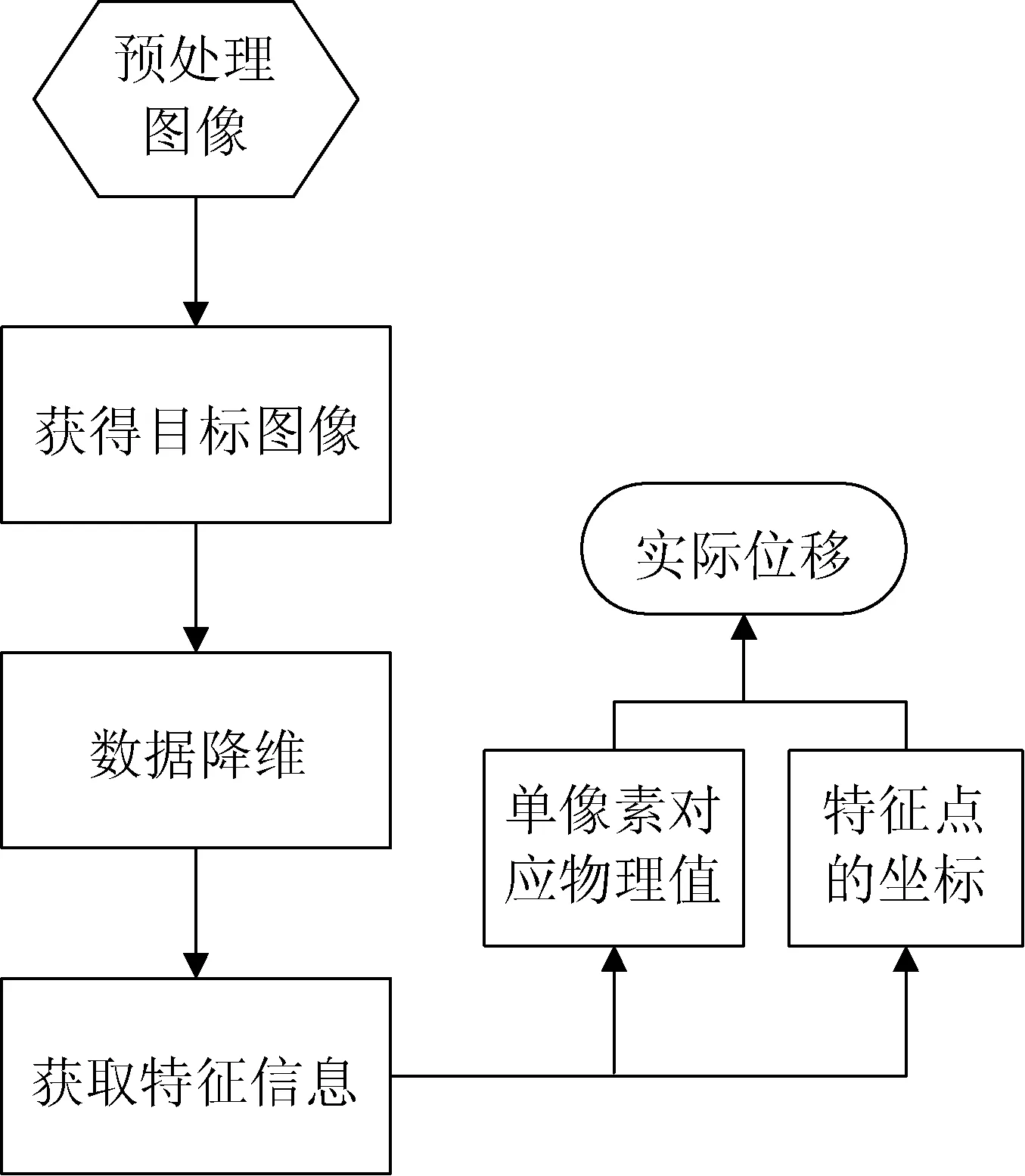
图4 标识识别流程图
获取目标图像时,根据图像的特征以及摄像头的感光原理,将像素点颜色信息由RGB色彩空间转换到灰度级,并进行二值化处理。
对标识1的图像在统计每行、列上Value=1的像素数量,形成两个线性队列空间X={a1,a2,…,an}、Y={b1,b2,…,bn},在线性队列空间中,找到图像边缘信息{x1、x2}{y1、y2},作为特征信息存放。得到D1(x1,y1),D2(x2,y2),D3(x1,y2),D4(x2,y1)。
在已知标识的物理尺寸情况下,通过对比两个方向上的相对应的边沿位置{x1、x2}、{y1、y2},通过式(3)计算获得在相对应方向上单个像素在X、Y方向上的实际物理大小dx、dy,其中L为标识的物理大小。

(3)

根据特征点之间的关系,通过式(4)计算获得在相对应方向上单个像素在X,Y方向的实际物理大小dx、dy,其中L为标识的物理大小。

(4)
3.2 标识边缘位置信息获取
(1) 如图5所示,分别将获得的线性队列X={a1,a2,…,an}、Y={b1,b2,…,bn}按照空间序列展开,计算序列内各点处斜率f′(n)。

图5 线性队列空间展开图

在运算过程中,程序仅需要存储线性队列X、Y,以一张320×240像素彩色图像为例,转换后,所需存储空间为1.09 KB,为原图像大小的0.7%。当图像大小固定时,算法的时间复杂度T(n)=O(1)。
3.3 标识形心位置信息获取
(2) 设形心坐标为(a,b),使a=x1、b=y1,顺序读取矩阵Z中元素,判断Z各点是否在以(a,b)为形心,以MaxX、MaxY为长、宽的候选区域内。如果在候选区域内,则按照式(5)重新计算当前形心坐标点(a,b),并将该点从矩阵Z中去除。
(5)
其中,n为当前候选区域内所包含点的个数。当遍历矩阵Z之后,记录当前形心坐标,记为点D1。重复上述步骤,依次获得点D2,D3,D4,如图6所示。
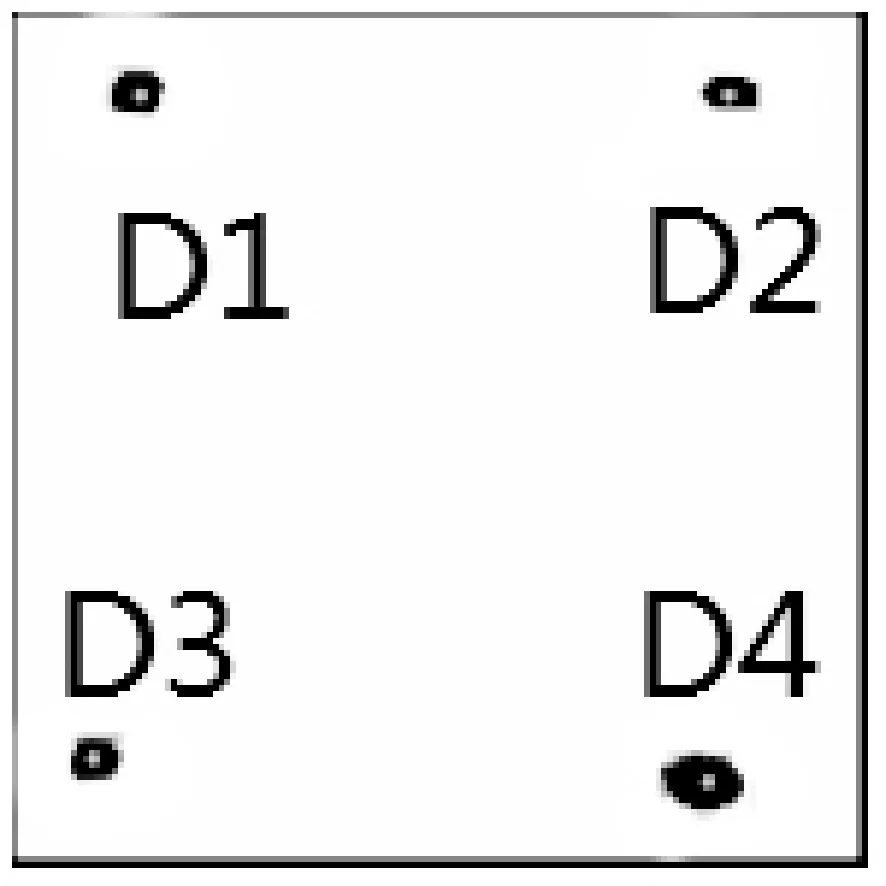
图6 标识2图像二值化
在运算过程中,程序仅需要存储二维矩阵Z,以一张320×240像素彩色图像为例,转换后,所需存储空间为3 KB,为原图像大小的1%。当图像大小固定时,算法的时间复杂度T(n)=O(1)。
由dx、dy及镜头焦距f可计算出摄像头到目标标识的距离信息Lc。比对前后帧图像中的特征点信息,获得空间各方向上的位移信息。
OV2640采用广角镜头会产生桶形畸变,或摄像头的轴线垂直于被测平面发生了倾斜等多种原因[9]。因此需要对获得的数据进行畸变校正,本文采用二阶插值方式对特征数据进行矫正。通过计算得到二阶插值函数式(6),其中x表示在垂直于光轴方向上的位移大小,F(x)表示校正后的位移大小。
F(x)=0.001 54×x2-0.673 2×x+8.947
(6)
4 硬件结构设计
将两种识别标识组合使用后,形成本文所设计的嵌入式视觉位移测量的硬件系统。整个系统分为两大模块:图像信息采集模块和图像信息处理模块。图像信息采集模块需要实现图像的实时采集、显示,以及标识控制功能;图像信息处理模块则需要对图像信息采集模块获得的图像进行滤波、降噪、灰度化、数据降维,通过运算处理,获得图像特征信息,最终实现位移测量功能并将结果显示到LCD屏上。
测量装置的设计量程如下:
垂直于光轴方向:±13 mm;单方向测量分辨率:≤0.5 mm;平行于光轴方向:±20 mm,单方向测量分辨率:≤1 mm。
在本文中所有的算法验证与实验操作均基于STM32F407处理芯片并配合OV2640图像传感器进行系统的开发与调试。
5 实验与结果
如图7所示,将标识放置在水平位移台上。将嵌入式视觉位移测量装置水平放置,其上摄像头正对组合识别标识。通过调节旋钮,控制水平位移台移动。观察LCD屏幕上显示的示数变化。

图7 模拟实验
表1为垂直于光轴方向位移测量结果,表2为平行于光轴方向位移测量结果。从表中可以看出,在垂直于光轴方向量程内,误差率控制在1%以内,在平行于光轴方向量程内,误差率控制在2%以内。上述结果,证明了算法的可行性,并说明本文的测量方法在小位移测量上具有较高的精度。

表1 垂直于光轴方向位移

表2 平行于光轴方向位移
6 结 语
本文提出的基于嵌入式图像识别技术的空间小位移测量方法,可用于在近距离测量目标的空间小位移,具有测量精度高、响应速度快的特点。只要将使用的标识附着在目标物体上,即可实现对任意物体的空间小位移测量。该技术可以广泛使用在GIS组合电器设备运行状态监控中,在空间小位移测量应用中有一定的参考价值。
[1] 闫君,罗文杰,张兴忠,等.GIS母线舱位移形变监测与预警系统研究与设计[J].电脑开发与应用,2015(2):5-7.
[2] 赵宗琼.基于ARM的单目视觉实时测距系统[D].太原科技大学,2013.
[3] 韩广良,宋建中.一种基于畸变等效曲面的图像畸变校正[J].光学技术,2005,31(1):122-124.
[4] 曾素娣.基于单目视觉的测距算法研究[D].昆明理工大学,2007.
[5] Chen H H,Wu C M.An algorithm of image processing for underwater range finding by active triangulation[J].Ocean Engineering,2004,31(8-9):1037-1062.
[6] 蒋珍今,裴承鸣,杨亮.基于摄像头测距的数字图像处理方法研究[J].弹箭与制导学报,2009,29(6):259-262.
[7] Bakar M N A,Saad A R M.A Monocular Vision-based Specific Person Detection System for Mobile Robot Applications[J].Procedia Engineering,2012,41(41):22-31.
[8] Lai X B,Wang H S,Xu Y H.A Real-time Range Finding System with Binocular Stereo Vision[J].International Journal of Advanced Robotic Systems,2012,9(27):1-9.
[9] 冯伟.图像桶形畸变校正的研究与实现[D].北方工业大学,2011.
[10] 王烨.基于Android系统的智能导航小车设计[D].天津大学,2014.
SMALLDISPLACEMENTMEASUREMENTBASEDONIMAGERECOGNITIONTECHNOLOGYEMBEDDEDSPACE
Wang Tianzheng1Li Yang2Lu Zhumao1Wang Qianshan3Zhang Xingzhong31
(StateGridShanxiElectricPowerResearchInstitute,Taiyuan030001,Shanxi,China)2(StateGridInformationandTelecommunicationBranch,Beijing100761,China)3(CollegeofComputerScienceandTechnology,TaiyuanUniversityofTechnology,Taiyuan030024,Shanxi,China)
GIS combination of electrical bus cabin spatial position and state monitoring is an important guarantee for GIS combination electrical system safe and stable operation. Aiming at the problems of electrical bus cabin space displacement deformation monitoring in outdoor GIS, the method of spatial small displacement measurement based on embedded system and monocular vision ranging method is proposed. We designed two visual identification marks to simplify the identification process. Non-contact displacement measurement of three-dimensional GIS busbar compartment is realized through the image processing captured by the camera, using spatial visual identity to obtain small displacements measured object. This technique can avoid complex camera system calibration and a large number of comparison calculations, which has some reference value in small space displacement measurement applications.
GIS Monocular vision Non-contact displacement measurement Visual Identification Small displacement
TP274
A
10.3969/j.issn.1000-386x.2017.09.041
2016-09-27。国家电网公司科技项目(520530150015)。王天正,高工,主研领域:高电压绝缘。李扬,工程师。芦竹茂,硕士。王千山,硕士生。张兴忠,副教授。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
计算机应用(2022年2期)2022-03-01 12:33:42
汽车工程师(2021年12期)2022-01-18 06:02:43
计算机应用(2021年4期)2021-04-20 14:06:36
计算机应用(2021年1期)2021-01-21 03:22:38
科学(2020年3期)2020-01-06 04:02:51
电子制作(2017年7期)2017-06-05 09:36:13
汽车维修与保养(2015年8期)2015-04-17 03:32:59
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
小天使·一年级语数英综合(2015年2期)2015-01-14 06:35:05